

3 Расчёт датчика обратной связи
Потенциометрические датчики состоят из каркасов, на которые намотан провод, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка (контактной щетки), который касается провода. Для обеспечения электрического контакта обмотка в месте касания зачищается от изоляции. Движок прижимается к обмотке за счет силы упругости.
Потенциометрический датчик линейных перемещений условно изображается в виде переменного резистора, длина которого соответствует длине обмотки реостата.
Выполним расчёт используемого потенциометрического датчика перемещений, схематично изображенного на рисунке 2, на предмет устойчивости от внешних помех и расчёт основных элементов датчика, удовлетворяющих заданным условиям [7].
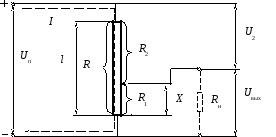
Рисунок 2 – Потенциометрический датчик перемещений
1) Анализ датчика на предмет устойчивости от внешних помех:
-
найдём максимально допустимую температуру нагрева обмотки
![]() , (31)
, (31)
где
![]() - предел прочности материала провода
(вольфрам),
- предел прочности материала провода
(вольфрам),
![]() ,
,
![]() - коэффициент линейного расширения
материала каркаса (оксидированный
алюминий),
- коэффициент линейного расширения
материала каркаса (оксидированный
алюминий),
![]() ,
,
![]() - коэффициент линейного расширения
материала провода (константан),
- коэффициент линейного расширения
материала провода (константан),
![]() ,
,
![]() - модуль упругости материала провода,
- модуль упругости материала провода,
![]() ,
,
![]() - минимальная температура нагрева
корпуса,
- минимальная температура нагрева
корпуса,
![]() .
.
![]()
![]() . (32)
. (32)
-
допустимое значение перегрева обмотки
![]() , (33)
, (33)
где
![]() - максимальная температура окружающей
среды,
- максимальная температура окружающей
среды,
![]() .
.
![]()
![]() . (34)
. (34)
2) Расчёт основных элементов датчика, удовлетворяющих заданным условиям:
-
диаметр провода (обмотки)
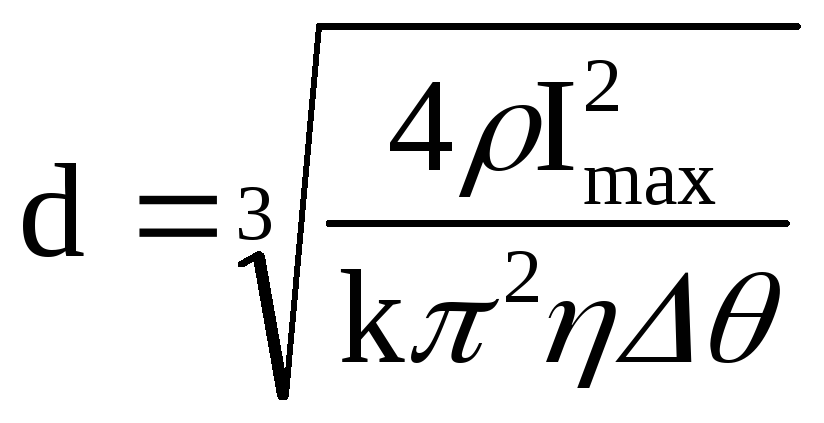 , (35)
, (35)
где
![]() - коэффициент, зависящий от конструкции,
- коэффициент, зависящий от конструкции,
![]() ,
,
![]() ,
,
![]() - удельное сопротивление материала
провода (константан),
- удельное сопротивление материала
провода (константан),
![]() ,
,
![]() - максимальный ток,
- максимальный ток,
![]() ,
,
![]() - коэффициент теплоотдачи.
- коэффициент теплоотдачи.
 . (36)
. (36)
-
средняя длина одного витка обмотки
![]() , (37)
, (37)
где
![]() - сопротивление потенциометра,
- сопротивление потенциометра,
![]() ,
,
![]() - число витков обмотки, (38)
- число витков обмотки, (38)
![]() - величина максимального перемещения
ползунка,
- величина максимального перемещения
ползунка,
![]()
![]() ,
,
![]() -
диаметр провода с изоляцией,
-
диаметр провода с изоляцией,
![]() ,
,
![]() , (39)
, (39)
![]() . (40)
. (40)
-
диаметр каркаса
![]() , (41)
, (41)
где
![]() -
диаметр провода с изоляцией,
-
диаметр провода с изоляцией,
![]()
![]() . (42)
. (42)
Таким образом, в результате расчёта было показано, что выбранный датчик устойчив по отношению к внешним помехам, в частности, к воздействию температуры, так как вычисленная максимально допустимая температура нагрева обмотки меньше допустимой температуры нагрева провода. Кроме того, были рассчитаны геометрические параметры основных элементов датчика, удовлетворяющие заданным условиям.
4 РАСЧЁТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Расчёт устойчивости непрерывной системы
К неизменяемой части системы относят все элементы с передаточной функцией, отличной от единицы.
Для определения устойчивости системы необходимо найти передаточную функцию разомкнутой системы управления, то есть системы без обратной связи, получаемую путем перемножения передаточных функций элементов прямой цепи:
![]() . (43)
. (43)
При подстановке в данное выражение найденных передаточных функций элементов в программе MathCAD получим:
 (44)
(44)
Заменив p на j в найденном выражении, получим частотную форму записи передаточной функции:
 (45)
(45)
По выражению (46) построим АФЧХ разомкнутой системы (рисунок 3):
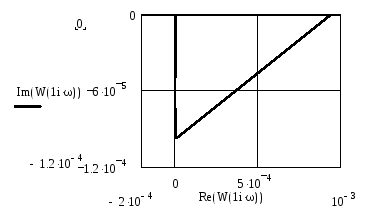
Рисунок 3 – АФЧХ разомкнутой системы
Согласно критерию Найквиста, замкнутая автоматическая система управления будет устойчивой, если АФЧХ разомкнутой системы не охватывает точку с координатами (-1;j0). Таким образом, имеем устойчивую систему с неограниченно большими запасами по амплитуде и фазе [1].
П![]() остроение
переходного процесса выполняется на
основе обратного преобразования Лапласа
от передаточной функции системы
автоматического регулирования в
замкнутой форме. Передаточная функция
замкнутой системы определим по формуле:
остроение
переходного процесса выполняется на
основе обратного преобразования Лапласа
от передаточной функции системы
автоматического регулирования в
замкнутой форме. Передаточная функция
замкнутой системы определим по формуле:
, (46)
Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме осуществляется в программе MathCAD:
![]()
![]() (47)
(47)
Графическое представление переходного процесса представлено в соответствии с рисунком 4.
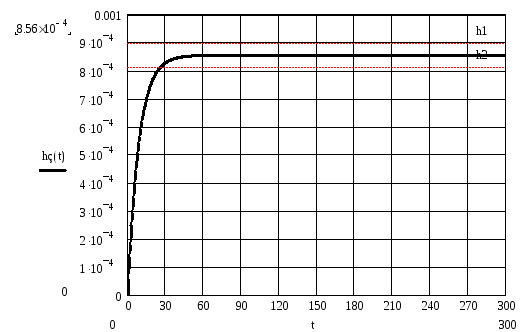
Рисунок 4 - График переходного процесса системы
Показатели качества определяются по графику 4 переходного процесса исходной системы автоматического регулирования:
1) =
![]() - перерегулирование;
- перерегулирование;
2) n = 0 – число полных колебаний;
3) tр = 30 с – время регулирования.
4.2 Расчёт устойчивости дискретной системы
Проверка устойчивости ЛСАУ с учетом ЭВМ выполняется на основании критерия устойчивости Шур-Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в z-форме.
Замкнутая система будет устойчива, если корни характеристического уравнения находятся внутри единичной окружности, т.е. если коэффициенты уравнения будут удовлетворять всем определителям Шур-Кона, имеющим отрицательные значения для нечетных определителей и положительные для четных.
Переход от операторной формы записи передаточной функции замкнутой системы к z-форме осуществляется при помощи MathCAD.
Р азложение
передаточной функции замкнутой САР на
элементарные дроби выполняется в
программе MathCAD:
азложение
передаточной функции замкнутой САР на
элементарные дроби выполняется в
программе MathCAD:
(48)
Переход от операторной формы к z –форме выполняется по формуле:
Wз(z)
=![]() , (49)
, (49)
где
![]() - фиксатор нулевого порядка,
- фиксатор нулевого порядка,
![]() –
z-форма непрерывной части системы
автоматического регулирования.
–
z-форма непрерывной части системы
автоматического регулирования.
Передаточная функция в z-форме с учётом времени дискретизации T0=65c имеет вид:

![]()
(50)
Подученное выражение с точностью входящих в него величин до 3-го порядка преобразуется к виду:


(51)
и далее
 . (52)
. (52)
Проверка устойчивости передаточной функции в z-форме выполняется по корням характеристического уравнения передаточной функции системы в z-форме:
![]() . (53)
. (53)
Определение корней характеристического уравнения выполняется в программе MathCAD:
 (54)
(54)
Таким образом, с достаточной степенью точности имеем 3 корня характеристического уравнения, которые находятся внутри единичной окружности. Следовательно, заданная система автоматического регулирования является устойчивой.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ И ИХ АНАЛИЗ
5.1 Построение ЛАЧХ
Для исследования системы с включенным МП, который является дискретным элементом, необходимо осуществить Ζ-преобразование передаточной функции (44) разомкнутой системы.
Р азложение
передаточной функции на элементарные
дроби выполняется в программе MathCAD:
азложение
передаточной функции на элементарные
дроби выполняется в программе MathCAD:
. (55)
Переход от операторной формы к z-форме выполняется по формуле (49). Передаточная функция в z-форме с учётом времени дискретизации T0=65c примет вид:

![]()
(56)
О существим
переход от найденной передаточной
функции в z-форме к её частотному выражению
через псевдочастоту λ путем применения
билинейного преобразования z=
существим
переход от найденной передаточной
функции в z-форме к её частотному выражению
через псевдочастоту λ путем применения
билинейного преобразования z=![]() и последующей замены
и последующей замены
![]() ,
где период дискретизации
,
где период дискретизации
![]() примем равным 65:
примем равным 65:
(57)
По полученной передаточной функции строим асимптотическую ЛАЧХ системы от псевдочастоты (рисунок 5).