

5 Построение желаемых лачх и лфчх. Анализ желаемой
ЛФЧХ
5.1 Построение жлачх
Для начала определим частоты сопряжения для цифровой системы. Аппроксимировать ЛАЧХ можно двумя методами: непосредственная аппроксимация графика ЛАЧХ или нахождение частот сопряжения из передаточной функции системы. Проведем достаточно точную аппроксимацию исходной ЛАЧХ (рис. 10).
Теперь воспользуемся методом синтеза ЖЛАЧХ, используя номограмму Солодовникова (рис. 12).
Рисунок 12 – Номограмма Солодовникова
Согласно
номограмме Солодовникова (выбираем
перерегулирование 20%) псевдочастота
среза
![]() Гц, где время регулирования tP=0.158.
Или, в логарифмическом масштабе,
lg(λСР)=1.8.
Гц, где время регулирования tP=0.158.
Или, в логарифмическом масштабе,
lg(λСР)=1.8.
Определим ограничивающие асимптоты:
![]() дБ
дБ
![]() дБ
дБ
Необходимо провести прямую с наклоном 20 дБ/дек, через частоту среза до пересечения с ограничивающими асимптотами.
Запретная зона строится исходя из скоростных характеристик цифровой системы, которые заданны в техническом задании.
Определим положение рабочей точки.
Псевдочастота
рабочей точки
![]()
Амплитуда
рабочей точки
![]()
В логарифмическом масштабе (0.06;35). Через эту точку проводим низкочастотную асимптоту с наклоном минус 20 дБ/дек.
За пределами полосы, ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с низкочастотной частью построенной ЛАЧХ.
График ЖЛАЧХ приведен в приложении.
Из графика восстановим передаточную функцию ЖЛАЧХ и корректирующего устройства.
Частоты сопряжения для ЖЛАЧХ:
λ1=25; λ2=30; λ3=150; λ4=170; λ5=1700
Передаточная функция запишется, как:
![]() (54)
(54)
Используем пакет Matab для построения желаемой ФЧХ и определения запасов устойчивости.
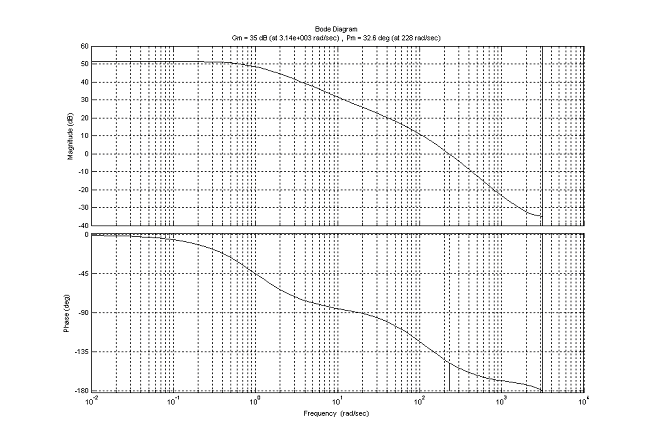
Рисунок 13
Согласно функции margin(WG), запасы определены в следующих пределах:
- запас по амплитуде 35 дБ
- запас по фазе 320
Имеем значительное увеличение запасов, что положительно скажется на работоспособности системе в целом.
5.2 Построение лачх корректирующего устройства
Частоты сопряжения для ЛАЧХ корректирующего устройства:
λ1=25; λ2=30; λ3=35; λ4=65; λ5=80; λ5=90; λ6=150
![]() (55)
(55)
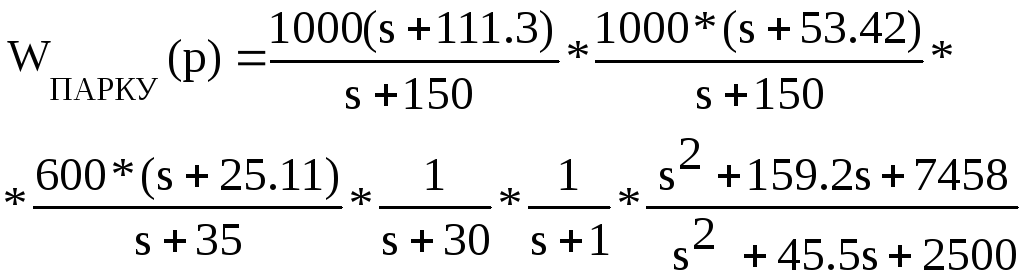
Была получена передаточная функция последовательного корректирующего устройства, которое будет влиять на быстродействие системы, однако моей системе требуется параллельное корректирующее устройство, т.к. необходимо повышать точность.
Для перехода от последовательного КУ к параллельному воспользуемся формулой перехода
WПАРКУ=WУ*(WПОСКУ-1) (56)
Определимся устройством, которому требуется коррекция. Просмотрев список устройств в системе можно прийти к выводу, что наиболее инерционными являются ДПТ и гидропривод. Однако коэффициент передачи гидропривода значительно меньше коэффициента передачи двигателя, таким образом, коррекции должен быть подвержен двигатель. Физически это трудно осуществимо, поэтому будем корректировать усилитель, т.к. он непосредственно воздействует на двигатель.
Передаточная усилителя:
![]() (57)
(57)
Таким образом:
 (58)
(58)
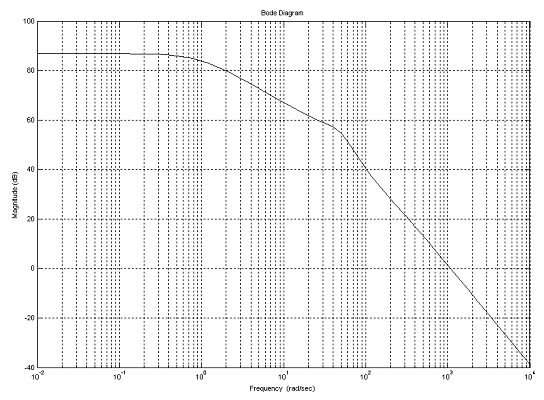
Рисунок 14 – ЛАЧХ корректирующего устройства
6 Синтез корректирующего устройства
6.1 Синтез параллельного корректирующего устройства
Задача синтеза, возникающая при проектировании системы автоматического регулирования, заключается в таком выборе структурной схемы системы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
Для нашей системы определяющим параметром является точность, так как робототехнический орган – захват, необходим для удержания объекта и не должен приводить к его порче. Передаточная функция необходимого КУ была найдена на предыдущем этапе, теперь требуется определить структурную схему КУ, его элементную базу и параметры необходимых элементов.
Для синтеза аппаратного корректирующего устройства будем применять RC-цепочки, согласно (58). Но для упрощения разобьем наше КУ на два последовательных
 (59)
(59)







Рисунок 15 – Первый каскад корректирующего устройства
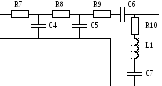







Рисунок 16 – Второй каскад корректирующего устройства
Для получения требуемого коэффициента усиления были поставлены 3 операционных усилителя, в качестве которых могут быть использованы усилители типа: К153УД4 и LM301A.
Выберем емкости конденсаторов для 1, 2 и 3 звеньев первого каскада:
C1=С2=С3=20
нФ, т.е.
![]() (кОм),
(кОм),
![]() (кОм)
(кОм)
![]() (кОм),
(кОм),
![]() (кОм)
(кОм)
![]() (мОм),
(мОм),
![]() (кОм)
(кОм)
Выберем емкости для второго каскада: С3=С4=100мФ
![]() (Ом)
(Ом)
![]() (Ом)
(Ом)
Для последнего звена: C7=10мкФ, C6=20мкФ, L1=200Гн.
![]() (Ом)
(Ом)
![]() (Ом)
(Ом)
На рисунке 14 представлена функциональная схема с корректирующим устройством.
ЭВМ
У
ДПТ
Р
ГП
ЗАХ
З
ВУ1
IPУ P
PГП
IdP
IУ
ωДВ l
ВУ2
Idl
КУ















ДД P
IP
ДЛ l
Il


Рисунок 17
Построим для системы с корректирующим устройством переходный процесс и определим показатели качества.
Переходный процесс строится с использованием функции step(w) пакета MatLab и представлен на рисунке 18.
Из графика видно, что процесс позиционирования захвата значительно улучшился. За 4 секунды захват способен осуществить позиционирование (10 секунд по техническому заданию). Кроме того, отсутствуют колебания.
Из всего сказанного можно сделать вывод, что коррекция системы проведена успешно, корректирующее устройство справляется со своей задачей. Система увеличила запасы устойчивости, исчезла колебательность.

Рисунок 18 – Переходный процесс скорректированной и исходной
системы