

Введение
В повседневной практической деятельности человеку приходится сталкиваться с многообразием процессов, которыми необходимо управлять, что в последнее время является одной из главенствующих задач.
Управление каким-либо объектом – это процесс воздействия на его с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Основой управления является получение и обработка информации о состоянии объекта и внешних условий его работы для определения воздействия, которые необходимо приложить к объекту, чтобы обеспечить достижения цели управления.
Все процессы в управлении носят общие закономерности, не зависящие от конкретных целей и объектов управления. Элементы САУ связаны друг с другом посредством передаваемых сигналов. Характер преобразования сигналов в объекте и сами эти сигналы предопределены назначением объекта в технологическом процессе и не могут быть изменены. Это следует учитывать при проектировании САУ, хотя для рассмотрения ее свойств и качества природа сигналов не принципиальна.
Системы автоматического управления создаются для того, чтобы автоматически, без непосредственного участия человека поддерживать необходимый режим работы различных обслуживаемых этими автоматами объектов. Системы автоматического управления самостоятельно, без вмешательства извне либо поддерживают постоянной, либо изменяют по заранее заданному закону одну или несколько физических величин, характеризующих процессы, происходящие в обслуживаемых объектах, или же сами определяют в зависимости от ряда условий нужный или оптимальный закон управления объектом.
Целью данной курсовой работы является проектирование САУ подъема шасси спортивного самолета.
Шасси предназначено для обеспечения стоянки, руления, буксировки, взлета и посадки самолета. Основные элементы шасси - колеса, амортизаторы, а также узлы крепления и соединительные детали. Размещение агрегатов шасси на самолете и тип амортизаторов определяют конструктивные схемы шасси, основными из которых являются колесные полозковые, поплавковые. Шасси могут выполнятся в виде комбинации из двух систем .
На спортивных самолетах в основном применяют колесное шасси, а самой распространенной схемой является трехопорное шасси с носовым колесом. Основные опоры располагаются симметрично относительно оси фюзеляжа, а третья опора – носовое колесо – устанавливается по оси фюзеляжа под носовой частью вертолета.
Колесо имеет два характерных размера: внешний, габаритный диаметр и диаметр сечения гидравлики. Для обеспечения в эксплуатации хорошей проходимости колес максимальное давление в гидравлике должно быть 600-700 кПа для сухого грунта 700-900 кПа[1].
Таким образом, требуется спроектировать САУ подъема шасси самолета, которая будет иметь параметры, обеспечивающие надежную работу шасси самолета во время эксплуатации.
-
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Спроектировать САУ подъема шасси спортивного самолета со следующими параметрами:
1. Тип силового привода – гидравлический;
2. Давление в гидроцилиндре P=600 -900 кПа;
3. Напряжение питания двигателя U =27В;
4. Мощность двигателя Pтр = 160-190 Вт;
5. Перерегулирование σ < 20 %;
6. Время регулирования tp = 0.04 c;
7. Рабочий диапазон температур -40…+40;
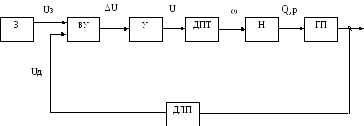
Рисунок 1 - Структурная схема САУ
З – задатчик;
МП – вычислительное устройство;
У – усилитель сигнала;
ДПТ –двигатель постоянного тока;
Н -насос;
ГП – гидропривод;
ДЛП – датчик линейного перемещения;
Рассмотрим структурную схему САУ – рисунок 1, она представляет собой схему с одним замкнутым контуром в ней регулирование осуществляется одним регулятором – перемещение.
Задающий сигнал для контура Uз поступает с задатчика, который может представлять собой датчик набора высоты или же сигнал задания может поступить от внешней по отношению к нему системы управления, например от диспетчера управления полетом [1].
В качестве вычислительного устройства будет использован микропроцессор, который будет воспринимать два сигнала Uз и Uд выполнять вычисление результирующего сигнала.
Результат сравнения величин поступает на усилитель У. Заведомо ясно, что величина напряжения и тока, а в конечном счете мощность будет недостаточна для двигателя, являющегося частью ИМ.
Вращающий момент с двигателя будет подаваться на шток насоса. Для исключения применения редуктора подбираем ДПТ и Н таким образом чтобы частоты вращения штоков соединения совпадали.
Насос обеспечивает нагнетание жидкости (масла) в цилиндрах гидропривода, для обеспечения перемещения поршня, который механически соединен с шасси самолета.
Собственно гидропривод ГП и является ИМ, так как именно он воздействует, за счет использования внешнего давления, на подъем шасси.
Сигнал о перемещении концевика шасси Uд поступает с датчика линейного перемещения в цепь ООС.
2 ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТНОЙ БАЗЫ И РАСЧЕТ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ВЫБРАННЫХ ЭЛЕМЕНТОВ
2.1 Двигатель постоянного тока ДП80-120-2
Электродвигатель подбираем таким образом чтобы мощность и число оборотов соответствовали показателям насоса, а напряжение питание было равным напряжению, имеющемуся на борту самолета не более 27В.
Таким требованиям будет соответствовать двигатель марки ДП80-120-2
Коллекторные двигатели постоянного тока малой мощности с возбуждением от постоянных магнитов ДП80-120-2 предназначены для привода специального механизма, а также могут быть использованы в широких областях техники.
Требуется определить требуемую мощность двигателя:
PТР=PВЫХ/ηОБЩ (1)
где: PТР – требуемая мощность двигателя;
PВЫХ – выходная мощность;
ηОБЩ – КПД конечного каскада.
Выходная мощность определяется необходимой силой для преодоления давления потока жидкости. Давление в гидроприводе составляет 700кПа, площадь поршня составляет 9.64*10-4 м2 (одного из двух), т.е. сила составляет 1.4 кН. Скорость перемещения штока должна составлять 0.05 м/с, т.е. требуемая мощность 70Вт.
Коэффициент полезного действия для шариковой винтовой передачи составляет 60% (редуктор в масле), а для гидропривода 70%. Т.о. PТР=167 Вт.
Возьмем в качестве исполнительного двигателя, двигатель постоянного тока ДП80-180-4 [2]
Технические характеристики:
диаметр корпуса, мм 50
номинальная мощность, Вт 180
номинальная частота вращения, мин-1 1500
номинальное напряжение питания, В 24±3
активное сопротивление обмотки якоря, Ом 1,0-1,2
индуктивность якоря, мГн 100
момент инерции двигателя Jд, кгм3 0,005
начальный пусковой ток при номинальном напряжении, А 2.8
КПД, % 72
масса двигателя, не более, кг 1.1
Определим коэффициент передачи двигателя. Для начала найдем электрическую постоянную двигателя
![]() (2)
(2)
тогда коэффициент передачи двигателя kД=1/Се=13.6.
Определим механическую постоянную времени. Найдем механическую постоянную времени:
 (3)
(3)
![]() (4)
(4)
Электрическая постоянная временя мала, поэтому ей можно пренебречь.
Передаточная функция ДПТ примет вид:
![]() (5)
(5)
2.2 Насос НВТ 1 -0,4 -1984
В системе можно использовать насос с достаточно низкими характеристиками т.к. создавать большое сжатие жидкости необходимости нет.
Для нашей системы подойдет насос следующего типа: НВТ 1 -0,4 -1984 [3]
Технические характеристики:
Масса не более m, кг 1,5
Подача Q, м3/час 0,4
Давление нагнетания р, кг/см2 1,57
Число оборотов ротора n, об/мин 1500
Мощность Pн, Вт 160
Передаточная функция насоса
W=Q/
=![]() (5)
(5)
Wн(р)=![]() (6)
(6)
2.3 Микропроцессор Z-80А
В системе требуется не дорогой но надежный процессор. С достаточно хорошими характеристиками работы. Этим требованиям удовлетворяет процессор Z-80А.
Технические характеристики:
Тактовая частота, МГц 7
Быстродействие, млн. операций в сек 1
Напряжение питания, В 5
Ток питания, мА 15
Передаточная функция микропроцессора
Wmp =1 (9)
2.4 Усилительное звено LM675
Напряжение, поступающее с МП равно максимально 3,5В, а ДПТ для работы в номинальном режиме требуется 27 В. Требуется усилительное звено с коэффициентом усиления в 8 раз. Данным характеристикам удовлетворяет усилитель типа LM675
Технические характеристики:
Напряжение питания максимальное, В 60
минимальное, В 20
Скорость нарастания сигнала, В/мкс 8
Коэффициент усиления регулируемый 2,5-250
Передаточная функция усилителя
Wu =8 (10)