

КУРСОВАЯ РАБОТА
по дисциплине локальные системы управления
САУ подъема шасси спортивного самолета
Выполнил ст.гр. УИТ-51: Хречков А.Н.
Руководитель проекта к.т.н., доцент: Скоробогатова Т.Н.
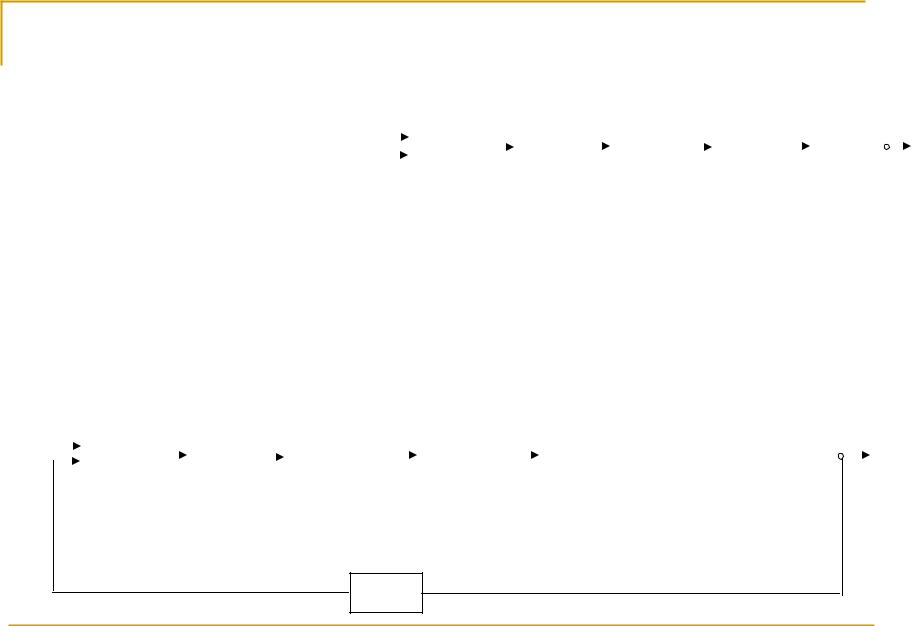
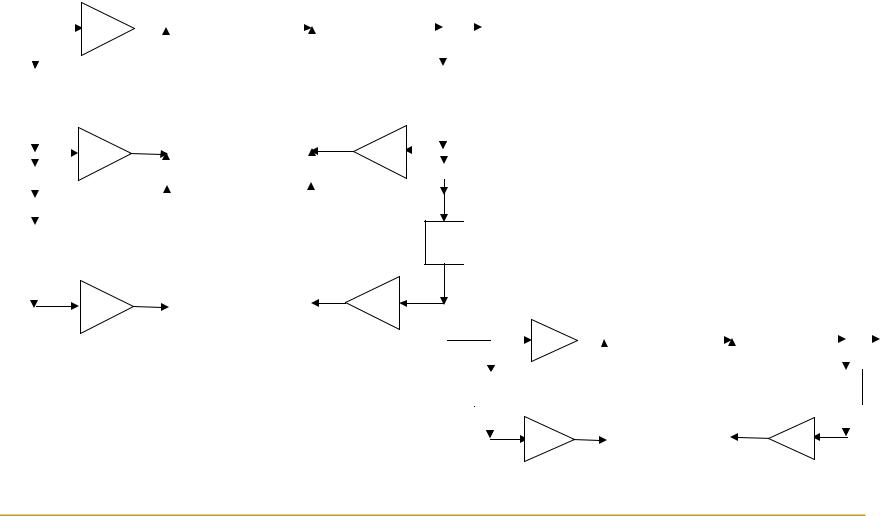
Структурная схема САУ
З – задатчик |
|
|
|
|
|
|
|
|
|
|
Uз |
|
|
|
|
∆U |
|
|
|
|
|
|
|
U |
|
Q,р |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
З |
|
|
|
|
|
|
|
|
ВУ |
|
|
|
|
|
У |
|
|
|
|
ДПТ |
|
|
|
Н |
|
|
|
|
ГП |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
(датчик высоты или АСУ ТП); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ВУ – микропроцессор Z-80А; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
У – усилительное звено LM675 |
|
Uд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ДПТ– двигатель постоянного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
тока ДП80-120-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЛП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Н – насос НВТ 1 -0,4 -1984 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ГП –гидропривод MAXIMA 350 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ДЛП – датчик линейного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
перемещения МВ-43-5В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Uз |
|
∆U |
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
Q,р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|||||||||||
|
|
|
|
13.6 |
|
|
|
|
|
|
0.51 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
1 |
8 |
|
|
|
|
|
|
0.000015 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.7 p 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p(109*10 9 p2 |
175*10 6 |
p 1) |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uд
0.07
|
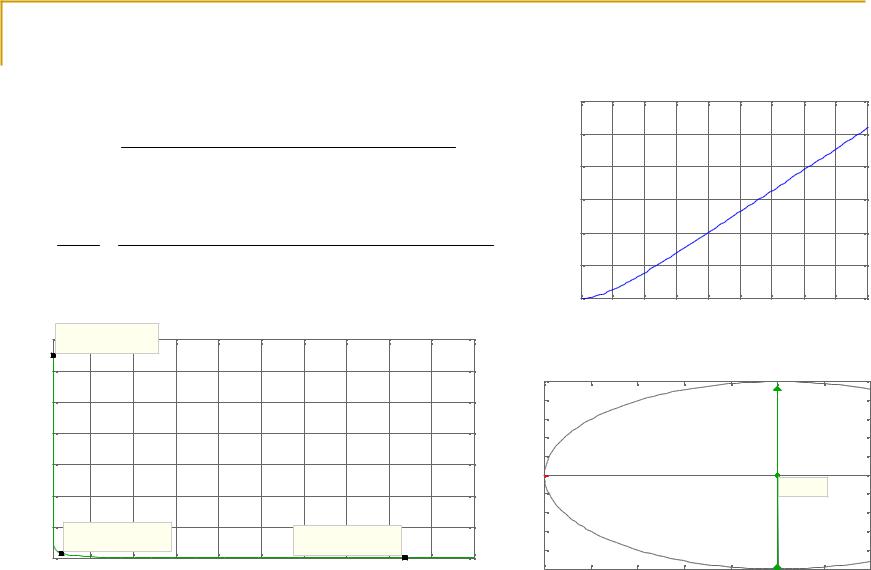
Исследование исходной |
|
|
|
|||||||||||||
|
|
Передаточная |
функция |
разомкнутой |
|
0.12 |
|
|
|
|
Step Response |
|
|
|
|
||
|
системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0.004786системы0.1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
Wp 1.853 10 7 p 4 |
|
|
|
|
|
|
|
|
|
|
||||||
|
0.0002976 p3 1.7 p 2 p |
|
0.08 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
Передаточная функция замкнутой |
Amplitude |
0.06 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
34436,6972 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Wz |
Wgc |
|
|
|
0.04 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 Wp |
|
( p 0,5878) ( p 0.000479) ( p2 |
1606 p 9.174 106 )6 |
|
0.02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
|
|
|
|
|
|
|
|
|
|
|
|
Time (sec) |
|
|
|
|
|
|
System: Wp |
|
|
Bode Diagram |
|
Переходный процесс в замкнутой |
|||||||||||
0.7 |
Frequency (rad/sec): 0.01 |
|
|||||||||||||||
|
|
||||||||||||||||
|
Magnitude (abs): 0.65 |
|
|
|
|
|
|
|
системе |
|
|
|
|
||||
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Nyquist Diagram |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
(abs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude |
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ImaginaryAxis |
|
|
|
|
|
Gain Margin (dB): 142 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
0.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wp |
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
At frequency (rad/sec): 58 |
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
Closed Loop Stable? Yes |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
0.1 |
System: Wp |
|
|
|
|
|
|
System: Wp |
|
0.6 |
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 0.031 |
|
|
|
Frequency (rad/sec): 0.838 |
|
|
|
|
|
|
|
|
|
|||
|
|
Magnitude (abs): 0.0155 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Magnitude (abs): 0.000329 |
|
0.8 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
0.8 |
0.6 |
0.4 |
0.2 |
0 |
0.2 |
0.4 |
|
|
|
|
|
Frequency |
(rad/sec) |
|
|
|
1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Real Axis |
|
|
|
|||
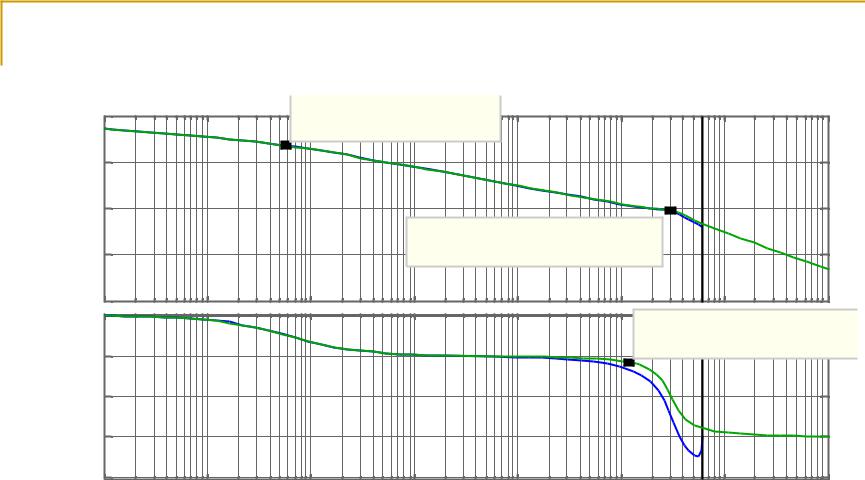
АЧХ разомкнутой системы |
АФЧХ разомкнутой системы |
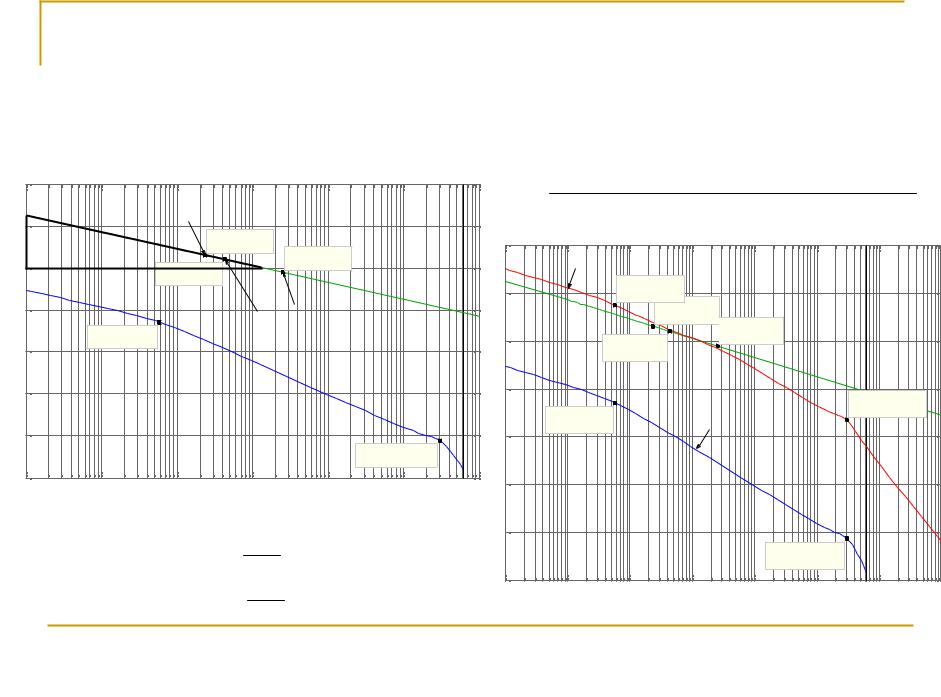
Синтез корректирующего устройства методом
Передаточная функция замкнутойзапретнойсистемы, скорректированнойзоныметодом запретной9 зоны, 9будет иметь вид:
100 





















 Bode Diagram
Bode Diagram 

























 WZ 3.5 10 p 8.225 10
WZ 3.5 10 p 8.225 10
p5 1632 p4 9.216 106 p3 2.394 108 p2 1.376 108 p
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wi |
|
|
|
|
|
|
|
|
|
|
|
|
|
Bode Diagram |
|
|
|
|
|
|
Zapret. zona |
|
Frequency (rad/sec): 2.35 |
|
|
|
|
|
100 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Magnitude (dB): 15.5 |
|
|
System: Wi |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 25.5 |
|
|
|
|
|
ЖЛАЧХ |
|
|
|
|
|
|
|
0 |
|
System: Wi |
|
|
|
|
|
Magnitude (dB): 5.2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Frequency (rad/sec): 4.33 |
|
|
|
|
|
|
|
|
|
|
|
|
System: w w |
|
|
|
|
|
|
|
|
|
Magnitude (dB): 10.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
Frequency (rad/sec): 0.584 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 37.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
L1 |
|
|
|
|
|
|
Frequency (rad/sec): 2.35 |
|
|
|
|
|
(dB) |
|
|
|
|
|
P.T. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 15.5 |
System: Wi |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Magnitude |
|
System: Wdisp |
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 4.33 |
|
Frequency (rad/sec): 25.5 |
|
|
||
|
Frequency (rad/sec): 0.581 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 5.2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
System: Wi |
|
|
|
|
||
|
|
Magnitude (dB): 64.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 10.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
System: w w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
(dB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wdisp |
|
|
|
|
Frequency (rad/sec): 3.02e+003 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 82.2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 0.581 |
|
ЛАЧХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 64.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wdisp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 3.02e+003 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 206 |
|
|
|
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
102 |
101 |
100 |
|
|
101 |
|
|
102 |
103 |
10 |
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency |
(rad/sec) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
частот |
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
log10 ( |
|
|
|
) 5.2648 |
|
|
|
|
|
|
|
|
|
System: Wdisp |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 206 |
|
|
||||
|
|
|
L1= |
|
M 1 |
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 3.02e+003 |
|
|
|||
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
M |
|
|
|
|
|
2 |
1 |
0 |
1 |
2 |
3 |
4 |
|
||
|
|
L2= |
20 log10 ( |
|
|
) 1.5563 |
|
|
|
10 |
|
10 |
10 |
10 |
10 |
10 |
10 |
1 |
||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
M |
1 |
|
|
|
|
|
|
|
Frequency (rad/sec) |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
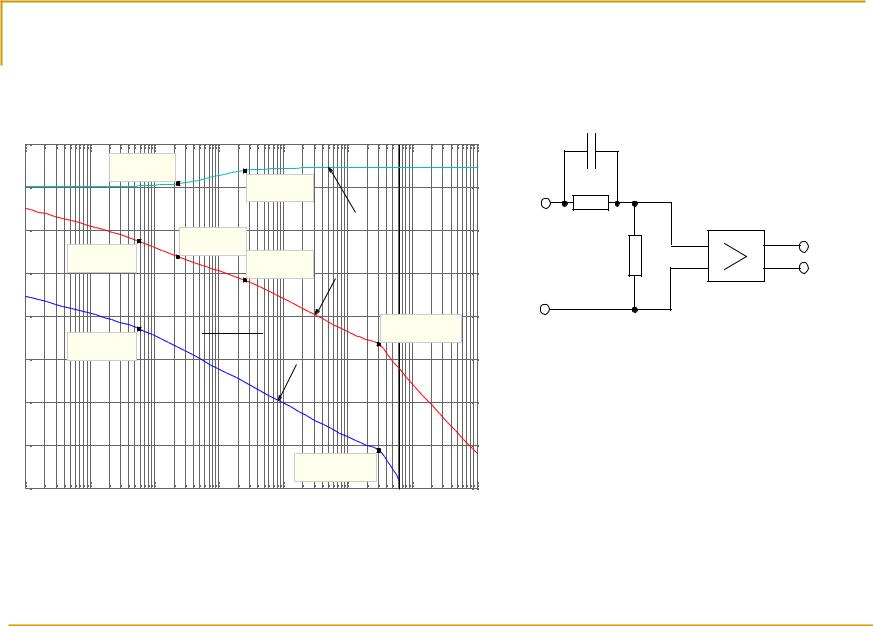
Разработка непрерывного |
|
|||||||||
|
|
|
|
|
|
последовательного |
|
|
||||||
|
150 |
|
|
|
|
Bode Diagram |
|
|
|
|
устройства |
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
System: WK1 |
|
|
|
|
|
|
|
|||
|
|
|
Frequency (rad/sec): 2.34 |
|
|
|
|
|
|
|
||||
|
|
|
|
Magnitude (dB): 105 |
|
System: WK1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
100 |
|
|
|
|
Frequency (rad/sec): 25.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude (dB): 120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛАЧХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Последовательного КУ |
|
|
R1 |
|
|
|
|
50 |
|
|
|
System: w w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 2.29 |
|
|
|
|
|
|
|
|
|
|
|
|
System: w w |
Magnitude (dB): 19.1 |
|
|
|
|
Uвх |
R |
|
Uвых |
||
|
|
|
Frequency (rad/sec): 0.584 |
|
System: w w |
|
|
|
|
2 |
||||
|
|
|
|
Frequency (rad/sec): 25.5 |
|
|
|
|||||||
|
0 |
|
Magnitude (dB): 37.5 |
|
|
|
|
|
||||||
|
|
|
|
|
Magnitude (dB): 7.62 |
ЖЛАЧХ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(dB) |
50 |
|
|
|
T1s 1 |
|
|
|
|
|
|
|
|
|
Magnitude |
|
|
|
|
|
System: w w |
|
|
Схема последовательного |
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Frequency (rad/sec): 3.02e+003 |
|
|
||||||
|
|
System: Wdisp |
|
|
|
|
Magnitude (dB): 82.2 |
|
|
|
||||
|
|
|
Wk1 |
(s) Kk1 |
|
|
|
|
|
|
|
|||
|
|
|
Frequency (rad/sec): 0.581 |
T2 s 1 |
|
|
|
|
корректирующего устройства |
|
||||
|
100 |
|
Magnitude (dB): 64.7 |
ЛАЧХ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
Передаточная функция четырехполюсника: |
||||
|
|
|
|
|
|
|
|
System: Wdisp |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/sec): 3.02e+003 |
|
|
KK1=R2/(R1+R2)=0,4255; |
|
|||
|
|
|
|
|
|
|
|
Magnitude (dB): 206 |
|
|
|
|||
|
250 |
2 |
1 |
0 |
10 |
1 |
2 |
3 |
4 |
5 |
|
|||
|
10 |
|
10 |
10 |
|
10 |
10 |
10 |
10 |
T1=R1*C1=0,0392; T2=KK1*T1=0,0921. |
||||
|
|
|
|
|
|
Frequency (rad/sec) |
|
|
|
|
||||
|
|
|
ЛАЧХ корректирующих звеньев |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||
При этом усилитель должен иметь коэффициент усиления: Ку=1249/0.0921=13565
Исследование дискретной |
|
|||||||
|
0 |
|
System: Wdisp |
|
|
|
|
|
|
|
Frequency (rad/sec): 0.58 |
|
|
|
|
||
( d B ) |
|
|
Magnitude (dB): 64.7 |
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
itu d e |
200 |
|
|
|
|
|
|
|
g n |
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wdisp |
|
||
a |
|
|
|
|
|
|
||
|
|
|
Frequency (rad/sec): 2.99e+003 |
|
||||
M |
300 |
|
|
|
||||
|
|
|
Magnitude (dB): 205 |
|
||||
|
|
|
|
|
||||
|
400 |
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
System: Wp |
|
g ) |
|
|
|
|
|
|
Frequency (rad/sec): 1.2e+0 |
|
180 |
|
|
|
|
|
Phase (deg): 194 |
|
|
e |
|
|
|
|
|
|
|
|
( d |
|
|
|
|
|
|
|
|
s e |
270 |
|
|
|
|
|
|
|
P h a |
360 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
450 |
|
|
|
|
|
|
|
|
102 |
101 |
100 |
101 |
102 |
103 |
104 |
105 |
|
|
|
|
Frequency (rad/sec) |
|
|
|
|
|
|
ЛАЧХ непрерывной и дискретной разомкнутых систем |
|
|||||
Передаточная функция |
Wdisp |
5.379 10 12 |
z3 4.51 10 11 z2 5.379 10 12 z 5.379 10 12 |
разомкнутой дискретной системы: |
z4 |
2.147 z3 1.743 z2 1.044 z 0.448 |
|
|
|
|
|
|
|
|
Разработка дискретного |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
последовательного |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
x(n) |
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
корректирующего устройстваПередаточной функции дискретного |
|
|
|||||||||||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
последовательного корректирующего устройства в |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
z1- |
|
|
|
|
|
|
|
z-1 |
|
формате цифрового фильтра: |
|
|
|
N |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K(z) |
Y (z) |
|
|
ai z i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X (z) |
|
M |
|
|
|||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
y(n-1) |
1 |
bi z |
i |
|||||
x(n-1) |
|
1 |
|
|
|
-b1 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z1- |
|
|
|
|
|
|
|
|
|
|
-bM |
x(n-N) |
|
|
aN |
|
||
|
|
|||||
|
|
|
||||
Схема реализации разностного уравнения
(1 0.9988 z 1 ) В данном случае Wkz 13556 (1 0.9873 z 1 )
z-1
соответствует разностное уравнение
|
|
|
|
|
|
|
|
|
N |
|
|
|
M |
|
|
|
|||
|
|
|
|
|
|
|
|
y n ai x n i bi y n i |
|||||||||||
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
i 0 |
|
|
|
i 1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n-M) |
|
|
|
|
|
|
|
|
|
|
|||||||||
x(n) |
|
|
|
|
|
y(n) |
|||||||||||||
|
|
|
|
|
|
1355 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
z- |
|
|
|
|
|
|
z- |
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
0,9873 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0,9988 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
Схема последовательного дискретного корректирующего устройства

Выбор корректирующего
1. WkU= 1249
 1249
1249
2.
|
R1 |
Uвх |
R2 |
3. Wkz 13556 (1 0.9988 z 1 ) (1 0.9873 z 1 )
x(n)

 13556
13556
z1- -1
0,9988 |
0,9873 |
Uвых
y(n)
|
z- |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4 |
|
|
|
|
Step Response |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: GWz |
|
|
|
|
|
|
|
|
|
1.2 |
Time (sec): 0.17 |
|
|
|
|
|
|
|
|
|
|
Amplitude: 1.14GWz |
|
|
|
|
|
|
|
|
|
|
Time (sec): 0.486 |
|
|
|
|
|
System: GWz |
|
|
|
|
Amplitude: 1.05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Time (sec): 6.44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Amplitude: 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
Amplitude |
|
|
|
|
Переходный процесс в скорректированной системе |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходный процесс в исходной системе |
|
|
|
||
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
System: Wz |
|
|
|
|
|
|
|
|
|
|
Time (sec): 5.38 |
|
|
|
|
|
|
|
|
|
|
Amplitude: 0.024 |
|
|
|
|
00 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Time (sec)
Переходные процессы в замкнутой системе до и после коррекции