

5.1 Нахождение передаточной функции разомкнутой системы
Разрывается обратная связь:

Рисунок 7 – Структурная схема разомкнутой системы
 (47)
(47)
5.2 Построение лачх и лфчх
Применяется программная среда Mathcad для получения дискретной передаточной функции:
 (48)
(48)
![]()
(49)
![]()
(50)

(51)
(52)


(53)

(54)
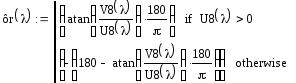
Амплитудная и фазовая логарифмические частотные характеристики разомкнутой системы:
![]()
![]()
0
0
-20
![]()
![]()
![]()


(56)
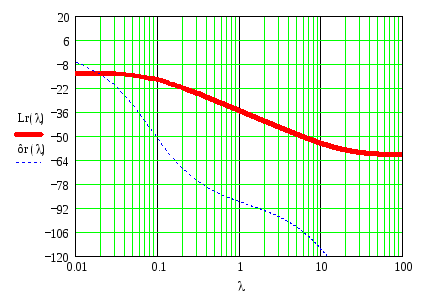
Рисунок 8 – ЛАЧХ и ЛФЧХ дискретной системы
Исходную ЛАЧХ можно разбить на три участка: 0 дБ/дек, -20 дБ/дек и 0 дб/Дек.
Вывод: методом логарифмических частотных характеристик строится последовательное корректирующее устройство, обеспечивающее получение системы с требуемыми показателями точности.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА
6.1 Исходные данные для разработки системы управления
Передаточная функция неизменяемой части системы:
 (57)
(57)
Задаются максимальные значения скорости и ускорения задающего воздействия g(t):
g1m=0.5;
g2m=0.1.
Показатели качества системы:
-
предельное значение допустимой ошибки управления
 ;
; -
перерегулирование
 ;
; -
время регулирования
 ;
; -
показатель колебательности

6.2 Построение запретной зоны
Границы запретной зоны строятся по качественным показателям системы. Для этого необходимо рассчитать частоту и амплитуду эквивалентного синусоидального сигнала:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
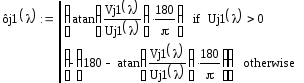
Подбираются
параметры ЛАХ
![]() так,
чтобы она прошла через точку А с наклоном
-20 дб/дек и ограничивала зону, ниже
которой разрабатываемая система не
должна опускаться.
так,
чтобы она прошла через точку А с наклоном
-20 дб/дек и ограничивала зону, ниже
которой разрабатываемая система не
должна опускаться.
![]() (58)
(58)
![]()
![]()
![]()

(59)
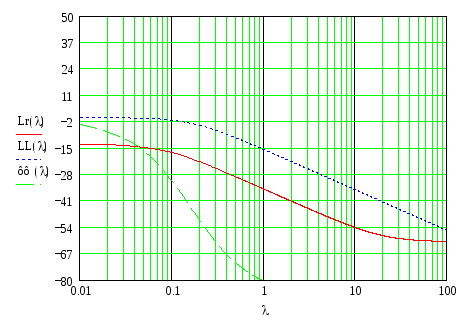
Рисунок 9 – График границы запретной зоны
Lr(λ) – реальная ЛАЧХ, LL(λ) – ЛФЧХ, LL(λ)- ЛАХ.
6.3 Построение желаемой лачх
Желаемая ЛАЧХ строится на основе качественных показателей, предъявляемых к разрабатываемой системе.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
(60)
-20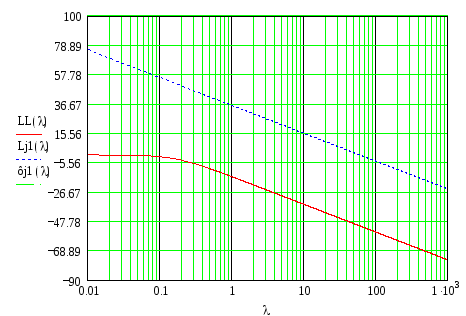
Рисунок 10 – График желаемой ЛАЧХ
Фj1(λ)– ЛФЧХ, Lj1(λ) - желаемая ЛАЧХ, LL(λ)- ЛАХ.
Желаемая ЛАЧХ Lj1(λ) проходит выше ЛАХ LL(λ) и удовлетворяет требованиям низкочастотной и среднечастотной зонах.
В высокочастотной области желаемая ЛАЧХ близка к реальной ЛАЧХ.