

2.8 Выбор датчика давления
Для нашей системы выбираем датчик давления АИР-20/М2.Этот датчик используется в системах автоматического контроля, регулирования и управления технологическими процессами.
Технические параметры:
- диапазон давлений 1кПа-6Мпа;
- основная погрешность от 0,075%;
- диапазон температур -10…+70Со.
Передаточная функция датчика давления имеет вид:
W8(p)=1 (24)
3 Расчет датчика обратной связи лсу
В данной локальной системе управления датчиком обратной связи является датчик давления АИР-20/М2. Чувствительным элементом в данном датчике является мембрана, выполненная из титанового сплава. Для того чтобы определить, насколько точно подобран датчик, необходимо произвести расчет его чувствительного элемента.
Для этого необходимо рассчитать следующие параметры:
- прогиб

= 8,56.106 (25)
- уравнение деформации

= 0,623 (26)
- радиальная деформация

= 5,669.107 (27)
- тангенциальная деформация

= 1,152.108 (28)
- собственная частота, Гц
![]()
= 17,85 (29)
где Y =105.10-3 Н/м - модуль Юнга материала мембраны;
v = 0,3 - коэффициент Пуассона материала мембраны;
р=106 Па - давление, действующее на мембрану;
R=2.10-2 м - радиус мембраны;
е=3.10-3 м - толщина мембраны;
р = 4,5*10-3 г/м3 - плотность материала, из которого изготовлена мембрана.
Основными параметрами того, что датчик давления выбран правильно, являются такие параметры, как прогиб мембраны (чувствительного элемента) и собственнная частота. Рассчитав эти показатели для используемого датчика давления, можно сказать, что датчик обратной связи выбран верно и подходит по требованиям, установленным системой.
4 ПРОВЕРКА НА УСТОЙЧИВОСТЬ, ПЕРЕХОДНЫЙ ПРОЦЕСС CАУ
ГЛУБИНОЙ ПОГРУЖЕНИЯ БАТИСКАФА
После расчета передаточной функции каждого элемента найдем общую передаточную функцию всей системы.
Н
U p U
1



p Δp n n
U=f(U) U
36
1
0,0125
1,62



![]()




![]()

1 p
Uизм


Рисунок 3 – Структурная схема САУ глубиной погружения батискафом.
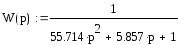
Передаточная функция замкнутой системы имеет вид:
![]()

(31)
(32)
По
критерию устойчивости Ляпунова, система
устойчива, если для нее выполняется
следующее условие:
![]() .
Т.е. для того чтобы САУ была устойчива
необходимо и достаточно, чтобы все корни
характеристического уравнения имели
отрицательные вещественные части.
.
Т.е. для того чтобы САУ была устойчива
необходимо и достаточно, чтобы все корни
характеристического уравнения имели
отрицательные вещественные части.
Тогда найдем корни характеристического уравнения, получим:
 (33)
(33)
Так как все корни характеристического уравнения лежат с лева от мнимой оси (левые корни) и имеют отрицательную вещественную часть, то САУ неизменяемой части будет устойчивой.
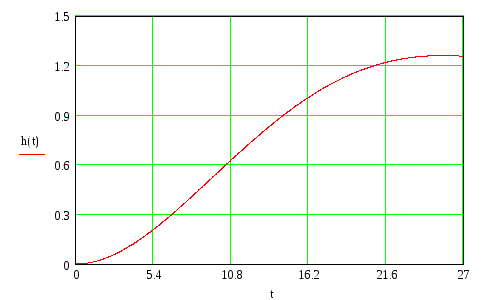
Построим переходный процесс САУ. Для этого проведем обратное преобразование Лапласа от передаточной функции САУ.
![]() (34)
(34)
Т.е.
![]() (35)
(35)
(36)
Δ
tп
tн,
t1



По полученному переходному процессу определим показатели качества САР:
-
Установившееся значение hуст=1,26.
Тогда 5% интервал отклонения от установившегося значения будет соответствовать следующей величине.
![]() (37)
(37)
-
Перерегулирование
![]() (38)
(38)
3) Время переходного процесса tп=20,5 с.
-
Время нарастания регулируемой величины (время достижения максимума) tн=25 c.
5) Время первого согласования (время, когда регулируемая величина в первый раз достигает своего установившегося значения) t1=25 c.
-
Период колебаний Т=∞.
-
Частота колебаний
 .
. -
Колебательность (число колебаний за время колебательного процесса) n=0.
-
Декремент затухания
 .
.
О
(39)
![]()
![]()
Аmax
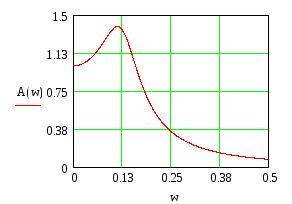
Рисунок 5 – Амплитудно-частотная функция САУ
1) Резонансная частота (частота при которой АЧХ достигает своего максимального значения) ωР=0,11.
2)
Показатель колебательности
![]() (40)
(40)
3) Частота среза – частота, при которой АЧХ достигает значения, равного 1. Следовательно ср=0.
4)
Полоса пропускания – время наилучшего
прохождения сигнала по системе. Для ее
определения вычисляется величина
![]() .
Следовательно, полоса пропускания –
значение
.
Следовательно, полоса пропускания –
значение
![]() в пределах от 0 до 1.
в пределах от 0 до 1.
Расчитаем устойчивость дискретной системы.
Для перехода к дискретной системе необходимо выполнить z-преобразование.
Так
как частота опроса датчиков по техническому
заданию составляет 1 раз в 5 секунд, то
время дискретизации равно
![]()
Z - преобразование выполним с передаточной функцией замкнутой системы. Для этого воспользуемся встроенной функцией программной среды Matlab 6.5 – c2d. Текст рабочей программы имеет вид:
>> Wz=tf([1],[55.714 5.857 1])
Transfer function:
1
-----------------------
55.71 s^2 + 5.857 s + 1
>> Wzed=c2d(Wz,1)
Transfer function:
0.008655 z + 0.008357
----------------------
z^2 - 1.883 z + 0.9002
Sampling time: 1
>> step(Wz,Wzed)

Рисунок 6 – График переходного процесса дискретной системы.
Определим устойчивость дискретной системы. Вычисления проведем с помощью программы Mathcade.
Проверка устойчивости локальной системы автоматического регулирования выполняется на основании критерия устойчивости Шур-Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в z-форме.
Характеристическое уравнение имеет вид:
![]() (41)
(41)
Замкнутая система будет устойчива, если корни характеристического уравнения находятся внутри единичной окружности, т.е. если коэффициенты уравнения будут удовлетворять всем определителям Шур-Кона, имеющим отрицательные значения для нечетных определителей и положительные для четных.


(42)
(43)
![]()
 (45)
(45)
(46)
Так как нечетный определитель имеет отрицательное значение, то исследуемую систему можно считать устойчивой.
Вывод: расчеты показали, что система приходит в устойчивое состояние, но её оценки качества не удовлетворяют техническому заданию, поэтому необходимо провести корректировку показателей точности системы с помощью последовательного корректирующего устройства.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК
СИСТЕМЫ И ЕЁ АНАЛИЗ