

6.4 Построение лачх корректирующего устройства
ЛАЧХ последовательного корректирующего устройства строится геометрическим вычитанием из ЛАЧХ желаемой ЛАЧХ реальную. По полученной ЛАЧХ получается его математическая модель в виде передаточной функции.
![]()
-20
-20
0



Рисунок 11 – ЛАЧХ корректирующего устройства
Вывод: в результате геометрического вычитания ЛАЧХ корректирующего устройства имеет вид прямой с наклоном -20 дБ/дек, поэтому корректировать показатели точности системы можно введением RC-цепочки.
7 Расчет корректирующего устройства
Рассчитаем корректирующее устройство в виде RC-цепочки.
R1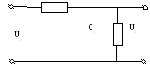
Рисунок 12 – RC-цепочка корректирующего устройства
L0=1, T1=RC
Передаточная функция корректирующего устройства имеет вид:
![]() (61)
(61)
Выберем
R=1
МОм,
![]() Ф.
Ф.
Тогда передаточная функция корректирующего устройства примет вид:
![]() (62)
(62)
Коррекцию системы можно произвести при помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства. Чтобы составить программу необходимо найти разностное уравнение в реальном масштабе времени.
После
замены
![]() ,
,
![]() ,
передаточная функция корректирующего
устройства примет вид:
,
передаточная функция корректирующего
устройства примет вид:
 (63)
(63)
 (64)
(64)
Далее умножим числитель и знаменатель на z-1, получим:
![]() (65)
(65)
Запишем передаточную функцию в виде подаваемых величин входных и выходных сигналов:
![]() (66)
(66)
Записываем характеристическое уравнение:
![]() (67)
(67)
Процедура коррекции для микропроцессора, написанная на языке Assembler позволяет рассчитать полученное выражение:
х – входной сигнал
у – выходной сигнал
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
А1 EQU -31;
A2 EQU 29;
B1 EQU 1;
B2 EQU 1;
x1, x2, DB 0; выделение памяти под переменные xk, xk+1;
у1, у2 DB 0; выделение памяти под переменные yk, yk+1;
вычисляем значение выражения (k)=A1*x1+A2*x2+B1*y1+B2*y2
start: ;метка начала цикла коррекции
in al,i_port ;чтение данных из порта
mov al,Al; вычисление слогаемого А1*х1
mov bl,al; сохранение результата в bl
в результате имеем А1*х1 в регистре bl
mov al,х2; вычисление
mul al,A2; слагаемое А2*х2
add bl,al; прибавление к предыдущему результату
в результате имеем А1*х1+А2*х2 в регистре bl
mov al,y1; вычисление
mul al,B1; слагаемое В1*у1
add b1,a1; прибавление к предыдущему результату
mov a1,y2; вычисление
mul al, B2; слагаемое В2*у2
add bl, a1; прибавление к предыдущему результату
в регистре b1 имеем результат вычисления всего выражения
mov y3,y2; для следующего такта
mov y2,y1;
mov y1,b1
mov x2,x1
mov x1,x
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
Блок-схема возможной процедуры коррекции изображена на рисунке 16.

Рисунок 13 – Блок-схема корректирующего устройства
Переходный процесс скорректированной системы имеет следующий вид.
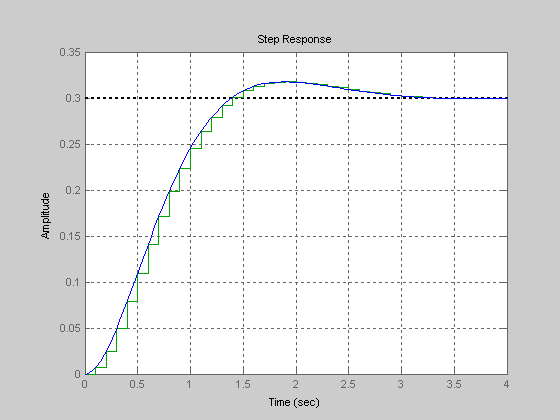
Рисунок 14 – Переходной процесс скорректированной системы.
Из рисунка 14 видно, что полученная система полностью соответствует техническому заданию.
Вывод: были рассмотрены программные и аппаратные корректирующие устройства. Отличительной особенность аппаратных КУ является их высокое быстродействие. Однако при современных вычислительных мощностях персональных и промышленных компьютеров этот факт не является решающим. Наиболее важным на сегодняшний день является такой фактор как преемственность, или возможность безболезненного переноса КУ с одной системы на аналогичную. Перенос аппаратного КУ является затруднительным, т.к. все параметры такого КУ являются жесткими и даже при небольших отличиях систем становится непригодным. Программное КУ с этой точки зрения является предпочтительным. Переносимость с одной платформы на другую, легкость эксплуатации и поддержания работоспособности. Возможно легко изменять параметры программы коррекции, что позволяет использовать одну программу для нескольких аналогичных систем.
ЗАКЛЮЧЕНИЕ
В процессе проектирования локальной системы автоматического управления глубиной погружения батискафа была проведена следующая работа: подбор элементов, нахождение их передаточных функций и всей непрерывной системы в целом, расчет датчика обратной связи. Далее было произведено исследование САУ на устойчивость. При исследовании были построены ЛАЧХ и ЛФЧХ.
Так как дискретная система не удовлетворяла техническому заданию, была произведена ее корректировка. В качестве корректирующего устройства могут быть использованы как электродвигатель, RC – цепочка, так и управляющая программа на языке ASSEMBLER.. Поскольку в САУ имеется микропроцессор, то для наиболее полного использования его возможностей, предпочтительней корректирующее устройство реализовать в качестве рабочей программы.
Таким образом, в результате проектирования была получена дискретная система автоматического управления глубиной погружения батискафа, удовлетворяющая требования, поставленным в техническом задании.
Список ИСПОЛЬЗУЕМОЙ литературы
1 Анфимов М.И. Редукторы. М.: Машиностроение – 1975 г.-105 с.
2 Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования., M.: Наука – 1972 г. -768 с.
3 Гурин М.Т. Электрические машины., М.: Энергия -1987 г.-356 с.
4 Дикарева А.А., Мирская М.И. Справочник по радиоэлектронным приборам., М.: Энергия – 1989 г.-143с.
5 Иващенко Н.Н. Автоматическое регулирование., М.: Наука – 1973 г.-324 с.
6 Сорокин П.В. Вычислительные комплексы. М.: Высшая школа – 1992 г.-323с.
7 Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования., М.: Машиностроение -1989 г.-752с.: ил.
8 Хвощ С.Т. Микропроцессоры и микроЭВМ в САУ: Справочник/ С.Т. Хвощ, Н.Н. Варлинский, Е.А. Попов; Под ред. С.Т. Хвоща. – Л: Машиностроение, 1987.
9 Чиликин М.Г. Общий курс электропривода., М.: Энергия – 1971 г.-432 с.: ил.