

СОДЕРЖАНИЕ
Введение 4
1 Техническое задание 5
1.1 Цель курсовой работы 5
1.2 Технические характеристики системы регулирования 5
1.3 Функциональная схема 5
2 Выбор и обоснование выбора элементной базы локальной системы
управления 7
2.1 Выбор микропроцессора 7
2.2 Выбор и расчет передаточной функции усилителя 8
2.3 Выбор двигателя 9
2.4 Выбор редуктора 10
2.5 Выбор заслонки 11
2.6 Выбор объекта управления 12
2.7 Выбор датчика температуры 13
2.8 Выбор датчика давления 14
3 Расчет датчика обратной связи ЛСУ 15
4 Проверка на устойчивость, переходной процесс САУ 17
5 Построение логарифмических характеристик системы и ее анализ 23
5.1 Нахождение передаточной функции разомкнутой системы 23
5.2 Построение ЛАЧХ и ЛФЧХ 23
6 Построение ЖЛАЧХ системы, ЛАЧХ корректирующего устройства 26
6.1 Исходные данные для разработки системы управления26
6.2 Построение запретной зоны 26
6.3 Построение желаемой ЛАЧХ 27
6.4 Построение ЛАЧХ корректирующего устройства 28
7 Расчет корректирующего устройства 30
Заключение 35
Список литературы 36
ВВЕДЕНИЕ
Задачей курсовой работы является развитие и закрепление навыков самостоятельной работы при решении конкретной задачи, овладение методикой расчета локальных систем управления.
Управляемый процесс может определяться рядом параметров и их соотношениями. В простых случаях управляемый процесс может достаточно полно определяться одним параметром (координатой). Системы для управления такими процессами носят название локальных систем автоматики. Это системы автоматики, предназначенные для решения одной функциональной задачи, для управления одним устройством или для управления или сигнализации одного параметра.
Типичными элементами любой системы управления являются измерители различных физических величин, или датчики, вводящие в систему управления информацию о задачах управления и результатах управления, функциональные преобразователи или вычислительные устройства, осуществляющие определение параметров управления и заданное их преобразование или более сложный анализ информации и вырабатывающие сигналы управления, исполнительные устройства.
В связи с увеличивающейся потребностью человека получать новые знания о среде обитания на планете земля, о строении земной поверхности и отыскание новых видов организмов, необходимы всё новые технические средства, которые позволяли бы получить новую информацию без непосредственного участия человека. Особенно этот вопрос актуален при изучении морских глубин, где жизнедеятельность человека невозможна вследствие высокого давления в сотни атмосфер. Поэтому на помощь приходят автоматизированные технические средства под контролем (управлением) человека.
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ
-
Цель курсовой работы
Целью курсовой работы является разработка системы автоматического управления глубиной погружения батискафа. Необходимо обеспечить хорошие запасы устойчивости по амплитуде и фазе, а также показатели качества. При необходимости систему следует скорректировать и вычислить параметры корректирующего устройства.
-
Технические характеристики системы регулирования
- длина, м 13,5;
- ширина, м 3,8;
- высота, м 5,7;
- водоизмещение, м3 55;
- рабочая глубина погружения, м 1000;
- автономность жизнеобеспечения аппарата, ч 120;
- масса, кг 200;
- рабочая среда гидросфера;
- температура окружающей среды, °C - 10 ÷ + 40;
- время регулирования, сек 25;
- перерегулирование не более, % 3;
- максимально допустимое отклонение регулируемой величины, % 1.
-
Функциональная схема ЛСАУ глубиной погружения батискафа
Рассмотрим принцип действия системы глубиной погружения батискафа. Функциональная схема системы автоматического управления глубиной погружения батискафа на рисунке 1.
В состав ЛСАУ входят следующие основные устройства:
- микропроцессор (МП);
- усилитель напряжения (У);
- двигатель постоянного тока (Дв);
- редуктор (Р);
- датчик давления (Дд);
- датчик температуры (Дт);
- заслонка (З);
- балластный бак (Б).
Функциональная схема СЛАУ представлена на рисунке 1.
Uизм p
Дт



t
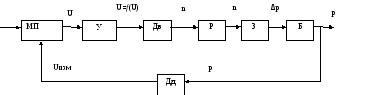
Рисунок 1 - Функциональная схема ЛСАУ глубиной погружения батискафа
2 Выбор И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ
ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор микропроцессора
Среди устройств автоматики наиболее широкое распространение получили микропроцессорные комплекты (МПК) серий К580, К583, К588. При выборе МПК следует руководствоваться следующими соображениями:
-
высокая производительность МП, достаточный объем ОЗУ и ПЗУ;
-
возможность цифровой обработки аналоговых сигналов в реальном
масштабе времени;
-
возможность программной коррекции;
-
малое энергопотребление;
-
совместимость с другими микросхемами;
-
доступность элементов;
-
мощная и гибкая система команд МП;
-
наличие встроенных ЦАП и АЦП.
На основании этих критериев выбираем МП серии К1813ВЕ1 [1]. Это однокристальный МП цифровой обработки аналоговых сигналов в реальном масштабе времени, со встроенными аналоговыми системами ввода-вывода (ЦАП и АЦП), с 8-ю разрядным ПЗУ, ОЗУ (емкостью 40х25 слов), ALU, двумя входными и четырьмя выходными аналоговыми каналами.
Этот МП выполнен по высококачественной n-МОП–технологии, совместим с БИС серии К580. В нем реализована мощная и гибкая система команд с расширенными возможностями адресации памяти.
Выбранный микропроцессор обладает необходимой производительностью, мощной и гибкой системой команд и управления обработкой информации, возможностью программной коррекции ЛСУ, совместим с БИС, и имеет возможность обрабатывать аналоговый сигнал в режиме реального времени благодаря встроенным АЦП и ЦАП.
Технические характеристики МП К583ВГ2:
-
25-ти разрядное АLU;
-
16-ти разрядные ОЗУ (192х24 бит) и ПЗУ (40х25 слов);
-
время преобразования не более 50 мкс;
-
нелинейность ЦАП и АЦП <0,1%;
-
тактовая частота 5 МГц;
-
напряжение питания до 6 В;
-
потребляемая мощность 1,0 В∙А;
-
входное аналоговое напряжение не более 2 В;
-
выходное сопротивление (хранение) не менее 100 кОм;
-
выходной ток 0,4-2 мА;
-
входной ток не более 2,0 мА;
-
диапазон рабочих температур от –10 до 70 0С.
Передаточную функцию МП принимаем равной единице.
W1(p)=1 (1)