

7 Расчет корректирующего устройства
7.1 Расчет аналогового корректирующего устройства
Для коррекции в системе применяется корректирующее устройство (КУ) последовательного типа. КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства в электрическую цепь после микропроцессора, так как именно под влиянием этого элемента данная система изменила некоторые свои характеристики на менее предпочтительные.

Рисунок 10 – Схема корректирующего устройства
Передаточная функция корректирующего звена
 ,
где
,
где
7.1
 ;
; .
.
7.2,7.3
Из графика ЛАЧХ корректирующего устройства определим частоты излома:
7.4
λа= λ1=0.02 с -1
7.5
λв= λ2=0.9 с -1
Постоянные времени, соответствующие этим частотам:
 с;
с; с.
с.
7.6, 7.7
Для расчета значений данного корректирующего устройства необходимо определиться со значениями сопротивлений резисторов:
 .
.
7.8
R1 примем равным 33 Ом, а R2 примем равным 1000 Ом, соответственно. Исходя из данных значений, остальные элементы корректирующего устройства будут иметь следующие значения:
 мкФ.
мкФ.
7.9
Подставляя все найденные параметры в выражение (7.1) для передаточной функции корректирующего устройства, получаем передаточную функцию в следующем виде:
7.10
 .
.
1
0.8
0.6
0.4
0.2
0
0
20
40
60
tр
hуст
h(t)
t, с
80
100
120
140
160
180

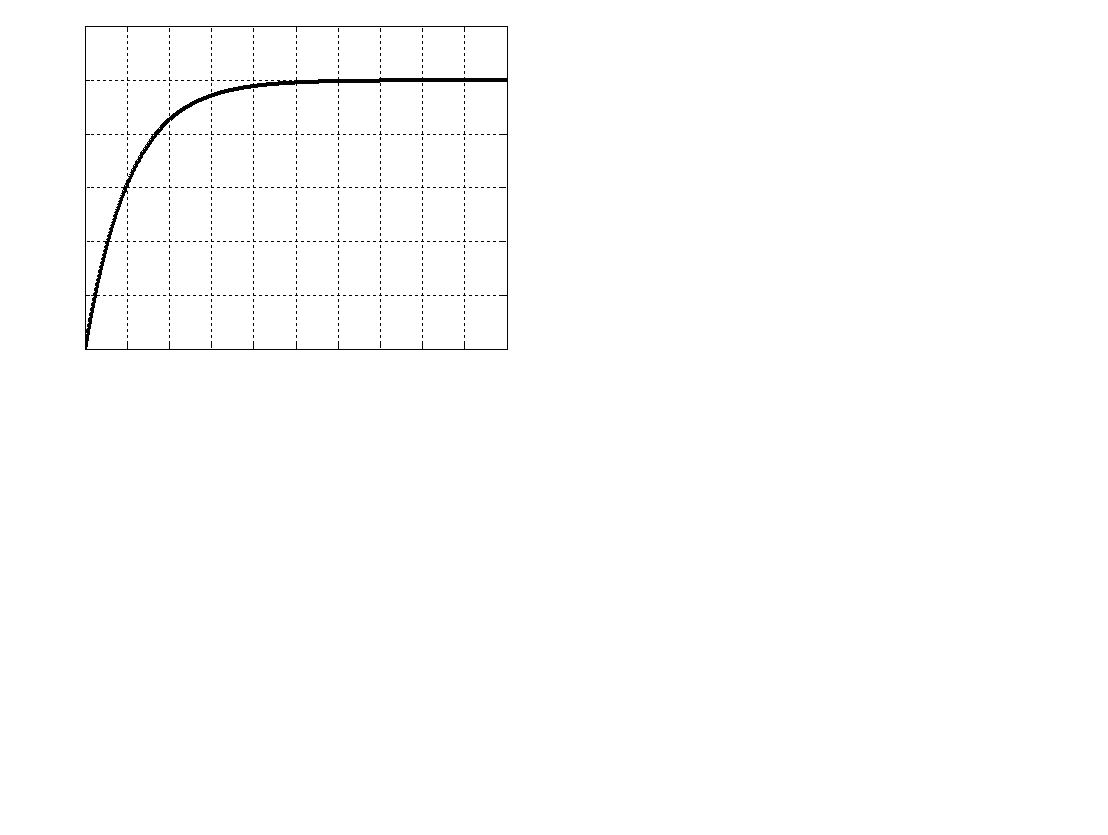
Рисунок 11 – Переходный процесс ЛСУ с последовательным КУ
Для того, чтобы убедиться в правильности расчета корректирующего устройства построим переходный процесс дискретной ЛСУ приготовления шоколадной смеси с включенным в нее корректирующим устройством (рисунок 11).
Проведя детальный анализ полученного графика переходного процесса рассматриваемой системы можно сделать вывод, что причина, по которой производилась коррекция, устранена. Следовательно, стоит признать, что подбор корректирующего устройства был произведен верно, и система успешно скорректирована.
7.2 Расчет дискретного корректирующего устройства
Одним из методов коррекции стало применение программных корректирующих устройств на МП, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор.
Для того чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
После
замены в формуле (7.1)
 ,
,
 ,
передаточная функция корректирующего
устройства примет вид:
,
передаточная функция корректирующего
устройства примет вид:
 .
.
7.11
Найдем разностное уравнение в реальном масштабе времени: для этого числитель и знаменатель выражения (7.11) умножим на z-1; в числителе z заменим на У, а в знаменателе z заменим на Х; затем из полученного числителя вычесть знаменатель. В результате проделанных действий получили:
 .
.
7.12

Рисунок 12 - Блок-схема программы коррекции системы автоматическогорегулирования процесса
Блок-схема программы коррекции представлена на рисунке 12.
По уравнению (7.12) реализуем программу коррекции на языке Ассемблер.
Программа коррекции:
i_portEQU 11h; номер порта для чтения
o_portEQU 12h; номер порта для записи
А1 EQU 21;
A2 EQU -19;
B1 EQU 67,2;
B2 EQU -65,2;
х1, х DB 0; выделение памяти под переменные х (k-1), х (k)
у1, у2, DB 0; выделение памяти подпеременные у (k-1), у (k-2)
;вычисляем значение выражения
;у(k)=A1*у1+A2*у2+B1*х1+B2*х
start: ;метка начала цикла коррекции
inal, i_port; чтение данных из порта (x)
moval,A1; вычисление слагаемого А1*у1
movbl, al; сохранение результата в bl
; в результате имеем А1*у1 в регистре bl
moval, у2; вычисление
mulal, A2; слагаемого А2*у2
addbl, al; вычисление из предыдущего результата
; в результате имеем А1*у1+А2*у2 в регистре bl
moval, х1; вычисление
mulal, B1; слагаемого B1*х1
addbl, al; вычисление из предыдущего результата
moval, х2; вычисление
mulal, B2; слагаемого B2*х
addbl, al; вычисление из предыдущего результата
; в регистре bl имеем результат вычисления всего выражения
mov у2, х1; для следующего такта
mov х1, bl;
mov у2, у1;
mov х1, х;
outo_port, bl; вывод управляющего сигнала изbl
jmpstart; зацикливание на начало программы
В данном разделе курсовой работы была разработана программа для дискретной коррекции, применение которой позволяет изменять параметры системы без изменения технического исполнения.