

4 Анализ устойчивости системы автоматического регулирования
4.1 Проверка устойчивости системы регулирования
Преобразуем структурную схему данной системы и найдем общую передаточную функцию непрерывной части системы. Непрерывная часть системы включает в себя все элементы системы кроме микропроцессора.
Принципиальная схема САР приведена на рисунке 5. Передаточные функции звеньев:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.

Рисунок 5 – Принципиальная схема системы автоматического регулирования загрузки бункера дробилки
Передаточная функция замкнутой системы имеет следующий вид:
![]() (21)
(21)
В результате прощений получим выражение:
![]() (22)
(22)
После приведения к нормальной форме передаточная функция преобразится:
![]() (23)
(23)
Выпишем характеристическое уравнение замкнутой системы (знаменатель передаточной функции).
![]() (24)
(24)
Произведем
замену
![]() ,
таким образом, перейдем к частоте
,
таким образом, перейдем к частоте![]() ,
применительно к которой будем судить
об устойчивости системы.
,
применительно к которой будем судить
об устойчивости системы.
![]() (25)
(25)
Для определения факта устойчивости системы регулирования воспользуемся критерием устойчивости Михайлова. В нем сказано: для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова при изменении частоты от нуля до бесконечности повернулся против хода часовой стрелки, начиная с вещественной оси, на число квадрантов, равное порядку характеристического уравнения, последовательно проходя эти квадранты.
Выделим действительную и мнимую части характеристического уравнения:
![]() (26)
(26)
![]() (27)
(27)
На
рисунке 6
приведена зависимость
![]() .
Из нее видно, что годограф начал движение
с действительной оси, повернулся против
ход часовой стрелки, пройдя пять
квадрантов и в последнем ушел в
бесконечность. Вышесказанное говорит
в пользу устойчивости системы
регулирования.
.
Из нее видно, что годограф начал движение
с действительной оси, повернулся против
ход часовой стрелки, пройдя пять
квадрантов и в последнем ушел в
бесконечность. Вышесказанное говорит
в пользу устойчивости системы
регулирования.
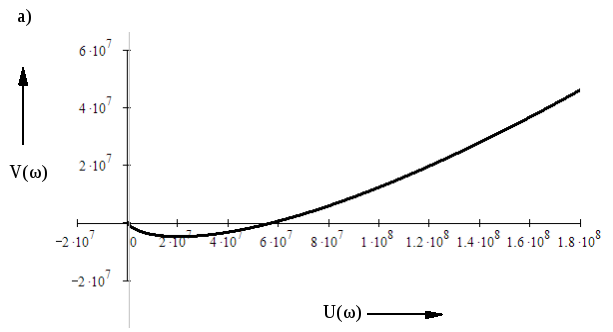

а – годограф Михайлова в увеличенном масштабе; б – годограф Михайлова в уменьшенном масштабе.
Рисунок 6 – Годограф Михайлова для замкнутой системы регулирования загрузки бункера дробилки
4.2 Определение прямых и косвенных оценок качества системы
Далее произведем построение переходного процесса.
Переходный процесс есть реакция системы на единичное ступенчатое воздействие. При этом закон переходного процесса определяется как обратное преобразование Лапласа от передаточной функции системы, уменьшенной в p раз.
![]() (28)
(28)
![]() (29)
(29)
Определим по виду графика (рисунок 7) нему прямые оценки качества системы.
![]() 0,15
– установившееся значение при t
= ∞;
0,15
– установившееся значение при t
= ∞;
![]() 55
с – время переходного процесса – время,
за которое система входит в 5%-ную трубку;
55
с – время переходного процесса – время,
за которое система входит в 5%-ную трубку;
![]() 0,15
– максимальное значение выходной
величины;
0,15
– максимальное значение выходной
величины;

Рисунок 7 – График переходного процесса
![]() 55
с – время согласования – время, за
которое выходная величина впервые
достигает своего установившегося
значения.
55
с – время согласования – время, за
которое выходная величина впервые
достигает своего установившегося
значения.
Величина перерегулирования составила:
![]() , (30)
, (30)
![]() .
.
Можно сделать вывод: по переходному процессу видно (см. рисунок 8), что система является устойчивой, были определены прямые оценки качества системы, такие как перерегулирование и время регулирования, которые удовлетворяют заданным в техническом задании параметрам системы. Отсюда следует, что линейная часть системы не нуждается в коррекции.

Рисунок 8 – Амплитудно-частотная характеристика линейной системы
Косвенные оценки качества системы определяются по графику амплитудно-частотной характеристики системы (рисунок 8). Для того, чтобы определить амплитудно-частотную характеристику системы, необходимо в передаточной функции заменить p на jω, знаменатель уравнения помножить на сопряженное выражение, выделить мнимую и вещественную части, и по следующей формуле строится амплитудно-частотная характеристика системы:
![]() . (31)
. (31)
По графику на рисунке 8 определяем:
А(0) = 0,15 – амплитуда при нулевой частоте;
Amax = А(0) = 0,15 - максимальная амплитуда;
![]() =
0 Гц - резонансная частота, при которой
амплитудно-частотная характеристика
достигает своего максимального значения;
=
0 Гц - резонансная частота, при которой
амплитудно-частотная характеристика
достигает своего максимального значения;
![]() -
показатель колебательности;
-
показатель колебательности;
ω=0,07 Гц – полоса пропускания.
4.3 Проверка дискретной системы на устойчивость с помощью критерия Шур-Кона
Проверка устойчивости системы автоматического регулирования с учетом микропроцессора выполняется на основании критерия устойчивости Шур-Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в форме z-преобразования.
Найдем дискретную передаточную функцию замкнутой системы. Для этого необходимо провести z – преобразований.
![]()
![]() (32)
(32)
В
курсовом проекте примем отношение
![]() =
1
=
1
Сама передаточная функция достаточно сложного вида, поэтому предварительно разобьем ее на простейшие дроби.
В итоге справедливо следующее:
![]() (33)
(33)
Произведем обратное преобразование Лапласа, после чего z-преобразование каждого слагаемого, далее просуммируем результаты.
![]() , (34)
, (34)
 , (35)
, (35)
 , (36)
, (36)
![]() ,
(37)
,
(37)
![]() , (38)
, (38)
![]() . (39)
. (39)
Период дискретизации T = 1 с. Окончательно имеем
 (40)
(40)
Построим график переходного процесса для замкнутой системы после z-преобразования.
По графику на рисунке 9 определим показатели качества системы автоматического регулирования:
![]() =0,15
– установившееся значение выходной
величины;
=0,15
– установившееся значение выходной
величины;
![]() -
величина перерегулирования;
-
величина перерегулирования;
n=0 – колебательность системы, то есть число колебаний регулируемой величины за время переходного процесса;
![]() 55
с – время нарастания – время, за которое
регулируемая величина достигает
установившегося значения;
55
с – время нарастания – время, за которое
регулируемая величина достигает
установившегося значения;
![]() 55
с – время первого согласования – время,
за которое регулируемая величина первый
раз достигнет своего установившегося
состояния.
55
с – время первого согласования – время,
за которое регулируемая величина первый
раз достигнет своего установившегося
состояния.

Рисунок 9 – График переходного процесса после z-преобразования
По виду переходного процесса видно, что система является устойчивой. Можно сделать вывод, что при введении в систему микропроцессора, качество системы не ухудшается, а значит, дискретная часть системы также является устойчивой.
Алгебраический критерий Шур-Кона позволяет анализировать устойчивость импульсных систем регулирования по характеристическому уравнению замкнутой системы, записанной в форме z-преобразования.
Характеристическое уравнение:
![]() .
(41)
.
(41)
Определитель Шур - Кона имеет вид:
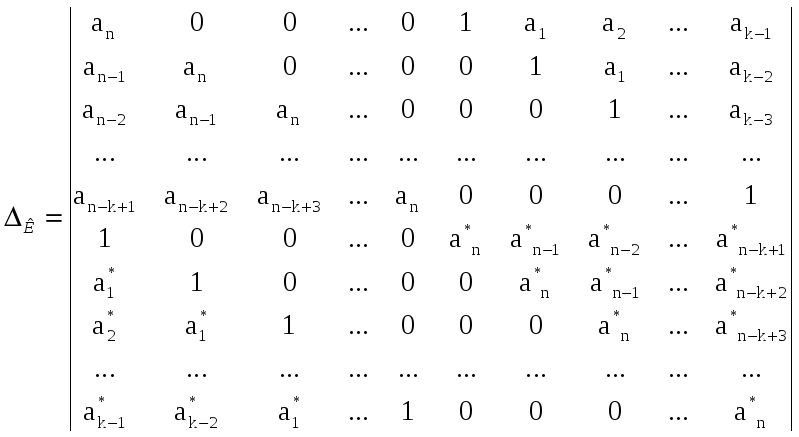 (42)
(42)
Импульсная система будет устойчива, если нечетные миноры матрицы Шур-Кона будут меньше нуля, а четные миноры матрицы будут больше нуля.
Характеристическое уравнение – знаменатель (40) – в данном случае имеет вид:
![]() (43)
(43)
Коэффициенты характеристического уравнения:
a0
= 1 a1
= -1 a2
=
![]() a3
=
a3
=
![]() a4
=
a4
=
![]() a5
=
a5
=
![]()
Рассчитаем диагональные миноры:
Δ5 (44)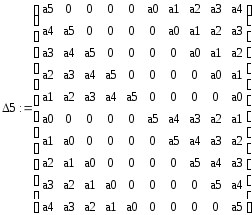
![]() ,
,
Δ4 (45)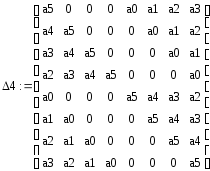
![]() ,
,
Δ3 (46)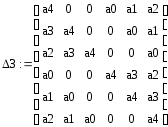
![]() ,
,
Δ2 (47)
![]() >
0,
>
0,
Δ1 (48)
![]() <
0.
<
0.
Как видно из расчета четные миноры больше нуля, нечетные – меньше нуля.
Следствием этого является устойчивость дискретной системы.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДНО-ЧАСТОТНОЙ И ЛОГАРИФМИЧЕСКОЙ ФАЗОВО-ЧАСТОТНОЙ ХАРАКТЕРИСТИК СИСТЕМЫ И ИХ АНАЛИЗ
Найдем дискретную передаточную функцию разомкнутой системы. Для этого необходимо провести z – преобразований.
![]()
 . (49)
. (49)
В
курсовом проекте примем отношение
![]() =
1.
=
1.
![]() . (50)
. (50)
 . (51)
. (51)
Сама передаточная функция достаточно сложного вида, поэтому предварительно разобьем ее на простейшие дроби.
В итоге справедливо следующее:
 . (52)
. (52)
Произведем обратное преобразование Лапласа, после чего z-преобразование каждого слагаемого, далее просуммируем результаты.
 (53)
(53)
 (54)
(54)
 (55)
(55)
 (56)
(56)
 (57)
(57)
 (58)
(58)
Период дискретизации T = 0,001 с. Окончательно имеем
 .
.
Сделаем
замену
![]() .
Выражение для передаточной функции:
.
Выражение для передаточной функции:
 .
.
Перейдем
к псевдо частоте для дискретных систем,
для чего заменим
![]() :
:
 .
.
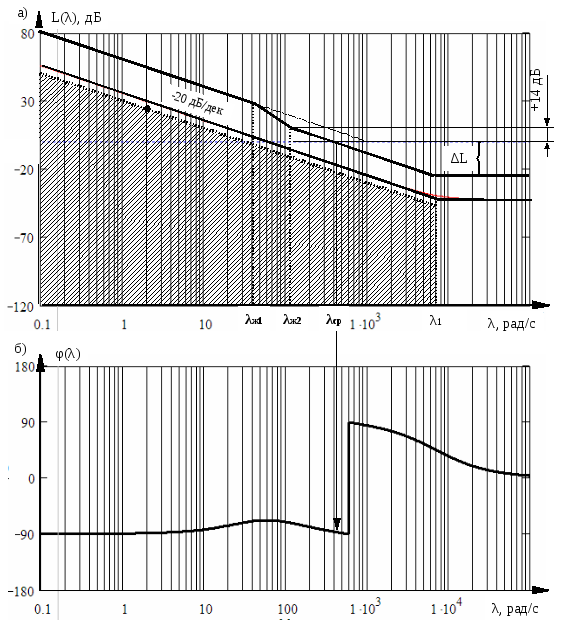
В результате будем иметь картину рисунка 10.
Точка излома единственная, которая имеет следующее значение псевдо частоты:
λ1 = 7000 рад/с.
Запасы устойчивости по амплитуде и фазе следующие:
A = 43 дБ – запас по амплитуде;
ψ = -90 – (-180) = 90º - запас по фазе.
По виду ЛАЧХ можно сказать, что система является устойчивой, о чем свидетельствует запас устойчивости по амплитуде равный 43 дБ, и запас по фазе – 90º. Правде заявленные в техническом задании значения перерегулирования и длительности переходного процесса несколько отличаются от действительных.

а – ЛАЧХ; б – ЛФЧХ.
Рисунок 10 – Частотные характеристики разомкнутой системы регулирования
Время переходного процесса 55 секунд, что меньше (а значит с точки зрения проектировщика - лучше) заявленных 60 секунд. Расчетная величина перерегулирования составила 0%, что меньше заявленных 30%. С одной стороны этот факт говорит в пользу качества синтезируемой системы, с другой налицо расхождение с техническим заданием. Следует провести работу по корректированию системы.
6 ПОСТРОЕНИЕ И АНАЛИЗ ЖЕЛАЕМОЙ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ РЕГУЛИРОВАНИЯ, ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДНО-ЧАСТОТНОЙ
Для построения желаемой логарифмической амплитудно-частотной характеристики приведем исходные данные:
- максимальная допустимая ошибка ε = 0,25;
- перерегулирование σ=30%;
-
время регулирования
![]() =
60 с.
=
60 с.
Желаемая логарифмическая амплитудно-частотная характеристика для дискретных систем строится методом запретной зоны. Для построения запретной зоны находим координаты рабочей точки, через которую будет проходить граница запретной зоны. У дискретных систем входной сигнал изменяется по следующему закону:
![]() .
(59)
.
(59)
Для данной системы справедливы следующие характеристики (рисунок 11):
- скорость изменения входного сигнала:
![]() рад/с;
рад/с;
- максимальное входное ускорение:
![]() рад/с2.
рад/с2.
Значение частоты рабочей точки:
![]() с-1
.
(61)
с-1
.
(61)
Ордината рабочей точки:
![]() .
(62)
.
(62)
Координаты
рабочей точки запретной зоны
![]() :
:
![]()

Рисунок 11 – Динамическая характеристика задающей части системы
Точка
![]() является
рабочей точкой для построения запретной
зоны. Проводим через рабочую точку
прямую с наклоном минус 20 дБ/дек. Зона,
находящаяся ниже построенной прямой,
является запретной и построение желаемой
логарифмической амплитудно-частотной
характеристики в этой зоне запрещено.
является
рабочей точкой для построения запретной
зоны. Проводим через рабочую точку
прямую с наклоном минус 20 дБ/дек. Зона,
находящаяся ниже построенной прямой,
является запретной и построение желаемой
логарифмической амплитудно-частотной
характеристики в этой зоне запрещено.
По номограмме качества Солодовникова (рисунок 12) определяется частота среза по заданному перерегулированию и времени регулирования системы:

Рисунок 12 - Номограмма качества Солодовникова для определения частоты среза системы
![]() (рад/с)
, (63)
(рад/с)
, (63)
![]() (рад/с)
. (64)
(рад/с)
. (64)
По
номограмме Солодовникова /6/ определяем
запас устойчивости по амплитуде
![]() дБ/дек.
дБ/дек.
Условно желаемую логарифмическую амплитудно-частотную характеристику разделяют на три части: высокочастотную, среднечастотную и низкочастотную. Низкочастотная часть логарифмической амплитудно-частотной характеристики определяет статическую точность системы. Среднечастотная часть определяет запасы устойчивости и является наиболее важной. Чем больше наклон среднечастотной логарифмической амплитудно-частотной характеристики, тем труднее обеспечить хорошие динамические свойства системы. Высокочастотная часть логарифмической амплитудно-частотной характеристики играет незначительную роль в определении динамических свойств системы.
Построение
желаемой логарифмической амплитудно-частотной
характеристики начинаем со среднечастотной
части. Через точку среза проводим прямую
с наклоном минус 20 дБ/дек. От точки среза
находим левую и правую граничные частоты,
откладывая запас устойчивости
![]() дБ/дек.
Высокочастотная часть для упрощения
корректирующего устройства сопрягается
с логарифмической амплитудной
характеристикой неизменяемой части
таким образом, что она будет иметь наклон
минус 20 дБ/дек до частоты
дБ/дек.
Высокочастотная часть для упрощения
корректирующего устройства сопрягается
с логарифмической амплитудной
характеристикой неизменяемой части
таким образом, что она будет иметь наклон
минус 20 дБ/дек до частоты
![]() ,
а затем наклон 0 дБ/дек.
,
а затем наклон 0 дБ/дек.
Передаточная функция желаемой логарифмической амплитудно-частотной характеристики в общем виде:
![]() ,
(65)
,
(65)
где
![]() 40 рад/с;
40 рад/с;
![]() 120
рад/с;
120
рад/с;
![]() =
7000 рад/с.
=
7000 рад/с.
Величины постоянных времени:
![]() с,
с,
![]() с,
с,
![]() с.
с.
Коэффициент усиления:
![]() дБ
дБ
![]()
Передаточная функция системы автоматического регулирования:
![]() . (66)
. (66)
По полученной передаточной функции строим желаемую логарифмическую фазово-частотную характеристику.
![]() .
(67)
.
(67)
Рассматривая
рисунок 13 можно выделить, что запас
устойчивости по амплитуде и запас
устойчивости по фазе немного изменились.
Так запас устойчивости по фазе:
![]() .
Запас устойчивости по амплитуде
определяется превышением
.
Запас устойчивости по амплитуде
определяется превышением
![]() на
частоте пересечения
на
частоте пересечения
![]() с осью 180°. Так как
с осью 180°. Так как
![]() не достигает 180°, находясь выше этого
значения, то запас устойчивости по
амплитуде ∆L=30
дБ.
не достигает 180°, находясь выше этого
значения, то запас устойчивости по
амплитуде ∆L=30
дБ.
Таким образом, получена система с заданными характеристиками, чем у реальной, с таким же запасом устойчивости по фазе и немного меньшим запасом устойчивости по амплитуде. Желаемая система получается из реальной путем введения корректирующего устройства. Далее будут рассмотрены варианты реализации корректирующих устройств, таких как последовательные корректирующие устройства и дискретные. Каждый из подходов имеет свои плюсы и может быть применим к синтезируемой в курсовой работе системе автоматического регулирования.
а – логарифмическая амплитудно-частотная характеристика; б - логарифмическая амплитудно-частотная характеристика.
Рисунок 13 –Частотные характеристики и желаемая логарифмическая фазово-частотная характеристика системы автоматического регулирования загрузки бункера дробилки