

6.2 Синтез программного корректирующего устройства
Запишем передаточную функцию корректирующего устройства в виде z-разностных уравнений, для чего воспользуемся обратным переходом от псевдочастоты, используем функцию перехода c2d(w) из пакета MathLab.
 (60)
(60)
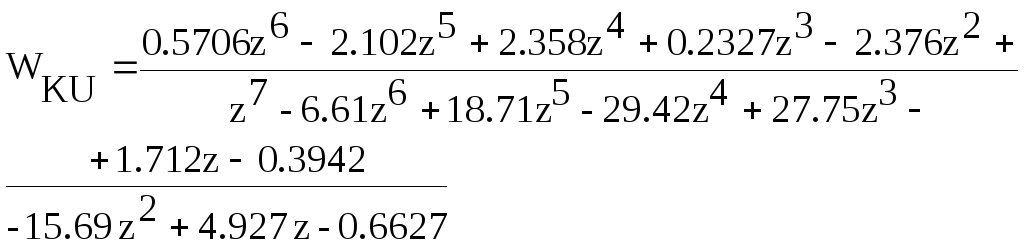
Перейдем от (60) к стандартной форме записи, для чего числитель и знаменатель разделим на z7.
 (70)
(70)
Для выражения (70) запишем разностное уравнение в реальном масштабе времени, введя в числитель дополнительный сдвиг на z-1.

;Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал
i_port EQU 1lh; номер порта для чтения
o_port EQU 12h; номер порта для записи
Al EQU 0.5706;
А2 EQU 2.102;
А3 EQU 2.358;
А4 EQU 0.2327;
А5 EQU 2.376;
А6 EQU 1.712;
А7 EQU 0.3942;
B1 EQU 6.61;
B2 EQU 18.71;
B3 EQU 29.42;
B4 EQU 27.75;
B5 EQU 15.69;
B6 EQU 4.927;
B4 EQU 0.6627;
xl, x2, x3, x4, x5, x6, x7 DB 0
;выделение памяти под переменные x(k-l), x(k-2), x(k-3)
yl,y2, y3, y4, y5, y6, y7 DB 0
; выделение памяти под переменные y(k-l), y(k-2)
; вычисляем значение выражения y(k)=Al*х1+А2*х2+А3*х3+A4*x4+A5*x5+
+A6*х6+А7*х7+В1*у1+В2*у2+В3*у3+В4*у4+В5*у5+В6*у6+В7*у7
start: ;метка начала цикла коррекции
in al, i_port; чтение данных из порта
mov al,Al; вычисление слагаемого А1*х1
mov bl, al; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al, X2; вычисление
mul al, А2; слагаемого А2*х2
add bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2 в регистре bl
mov al, X3; вычисление
mul al, А3; слагаемого А3*х3
add bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2+А3*х3 в регистре bl
…
mov al, yl; вычисление
mul al, Bl; слагаемого Bl*yl
add bl, al; прибавление к предыдущему результату
mov al, y2; вычисление
mul al, B2; слагаемого В2*у2
…
add bl, al; прибавление к предыдущему результату
; в регистре bl имеем результат вычисления всего выражения
mov y3, y2; для следующего такта
mov y2, y1;
mov yl, bl
mov x2, xl;
mov xl, x;
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
6.3 Выбор корректирующего устройства
Были рассмотрены два вида корректирующих устройств: программное и аппаратное. Отличительной особенность аппаратных КУ является их высокое быстродействие. Однако при современных вычислительных мощностях персональных и промышленных компьютеров этот факт не является решающим.
Наиболее важным на сегодняшний день является такой фактор как преемственность, или возможность безболезненного переноса КУ с одной системы на аналогичную.
Перенос аппаратного КУ является затруднительным, т.к. все параметры такого КУ являются жесткими и даже при небольших отличиях систем становится непригодным.
Программное КУ с этой точки зрения является предпочтительным. Переносимость с одной платформы на другую, легкость эксплуатации и поддержания работоспособности. Возможно легко изменять параметры программы коррекции, что позволяет использовать одну программу для нескольких аналогичных систем.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования была разработана система управления наведения зенитно-пусковой установки. Система формируется с учетом микропроцессорного управления.
Разработанное устройство отвечает требованиям технического задания. С помощью анализа системы был выявлен недостаток – несоответствие ЛАЧХ системы с типовой ЛАЧХ, обеспечивающей наиболее оптимальные показатели качества САУ. С помощью метода синтеза было разработано корректирующее устройство, приводящее систему к устойчивому виду. В дальнейшем это корректирующее устройство было использовано в этой системе для улучшения показателя быстродействия системы.
В качестве КУ может быть использовано как RCL – цепочка, так и управляющая программа на языке ASSEMBLER. Был осуществлен синтез корректирующего устройства двух типов: аппаратного и программного. Поскольку в САУ имеется МП, то для наиболее полного использования его возможностей, предпочтительней КУ реализовать в качестве рабочей программы, так как время обрабатываемых микропроцессором сигналов (50 мкс) меньше времени обработки сигналов корректирующим устройством в виде RCL – цепочки (0,13 с).
Таким образом, после продолжительного проектирования была получена дискретная система автоматического управления, удовлетворяющая требования, поставленным в техническом задании. Работоспособность системы подтверждается многочисленными характеристиками, приведенными в отчете.
ПРИЛОЖЕНИЕ A
(обязательное)
1 Функциональная схема САУ захватом руки робота манипулятора 48
2 Расчет датчика давления 49
3 Проверка устойчивости системы 50
4 Построение ЛАЧХ, ЖЛАЧХ и ЛАЧХ корректирующего устройства 51
5 Подбор и расчет корректирующего устройства 52
6 Блок-схема программы коррекции 53
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Робототехника: История и перспективы. Научное издание. Макаров И. М. , Топчеев Ю. И. издательство - Наука, 2003.
2. Механика промышленных роботов. в 3-х книгах Под ред.К.В.Фролова, Е.И.Воробьева. -М.: Высшая Школа, 1988.
3. Манипуляционные системы роботов. Под ред. А.И.Корендясева.-М: Машиностроение,1989.
4. Теория механизмов и машин. Под ред. К.Ф.Фролова. -М: Высшая Школа, 1987.
5. Устройство промышленных роботов. Под ред. Е.И.Юревича, Б.Г.Аветиков, О.Б.Корытко и др. -Л:Машиностроение, 1980.
6. Системы управления промышленными роботами и манипуляторами. Отв.ред.проф.Е.И.Юревич. -Изд. ЛГУ,1980.
7. Проектирование и разработка промышленных роботов. Под ред. П.Н.Белянина, Я.А.Шифрина. -М:Машиностроение,1989.
8. Козырев Ю.Г. Промышленные роботы. Справочник. -М:Машиностроение, 1988.
9. Современные промышленные роботы. Каталог. Под ред. Ю.Г.Козырева и Я.А.Шифрина. -М:Машиностроение, 1984.
[Измерения в промышленности/Под. ред. П.Профоса – М.: Металлургия, 1980].