

7. Моделирование функционирования сау с использованием эвм.
Для моделирования динамики САУ на ЭВМ воспользуемся системой
MATLAB. Виртуальная модель, полученной в результате расчетов САУ, в среде MATLAB изображена на рисунке 12.
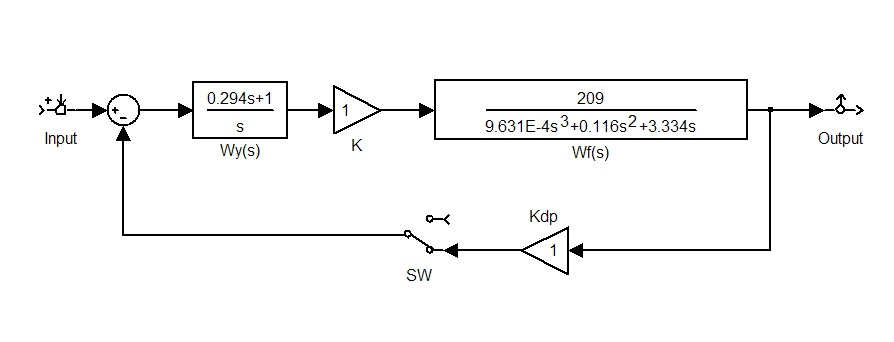
Рисунок 12. Виртуальная модель САУ
Здесь передаточная функция управляющего устройства обозначена как Wy(s), K – коэффициент усиления управляющего устройства, Wf(s) – передаточная функция системы, Kdp – коэффициент передачи датчика положения вала электродвигателя. Переключатель SW отключает обратную связь.
Для построения частотных характеристик используем модуль Linear analysis. Построим ЛАЧХ и ЛФЧХ для системы с разомкнутой цепью обратной связи (рисунок 13) и для схемы с обратной связью (рисунок 14).
Частотные характеристики разомкнутой системы совпадают с полученными при предварительном расчете. Для того чтобы проверить перерегулирование G и длительность переходного процесса tn, нужно построить график передаточной функции. Наиболее простым путем решения задачи является применение Linear analysis из среды MATLAB, графиком переходной функции будет являться график реакции системы на воздействие импульса единичной амплитуды (рисунок 15).
Из рисунка 15 видно, что перерегулирование составляет 25%, а время переходного процесса 1 с. Таким образом, полученная система полностью соответствует всем требованиям, приведенным в задании.
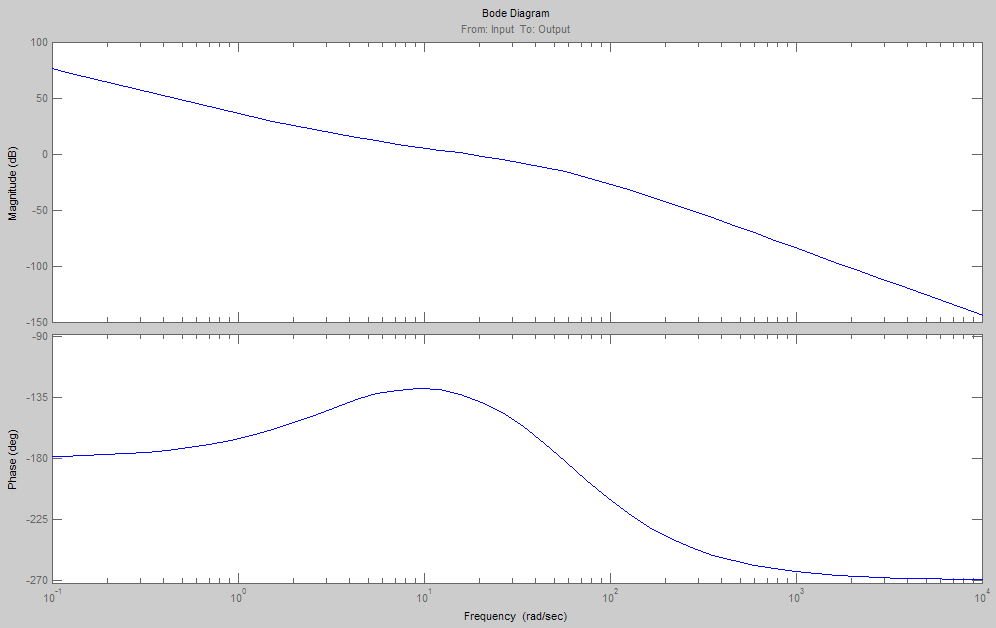
Рисунок 13. ЛАЧХ и ЛФЧХ системы без ОС
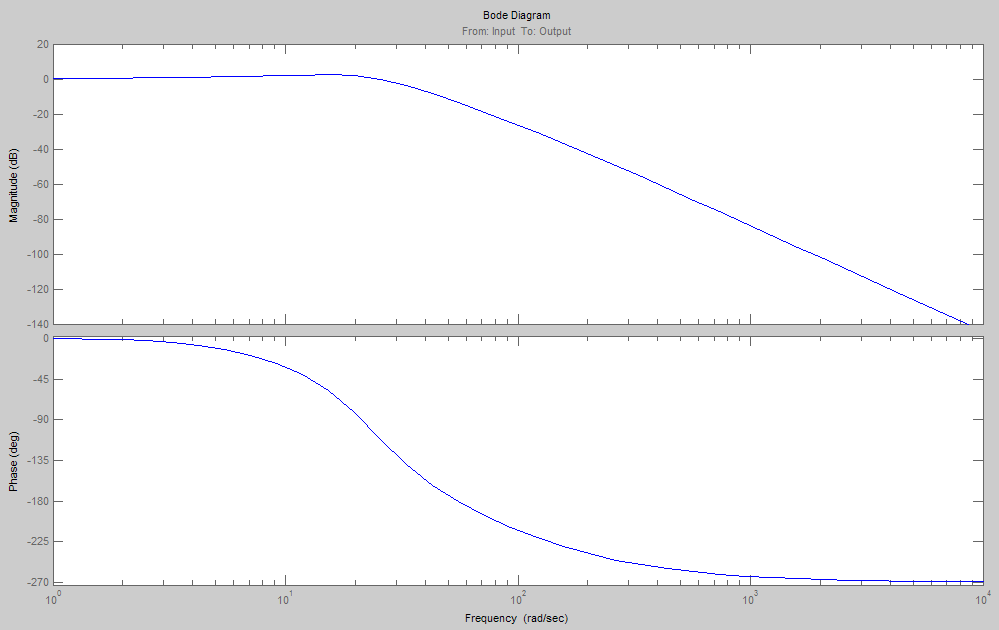
Рисунок 14. ЛАЧХ и ЛФЧХ системы с ОС
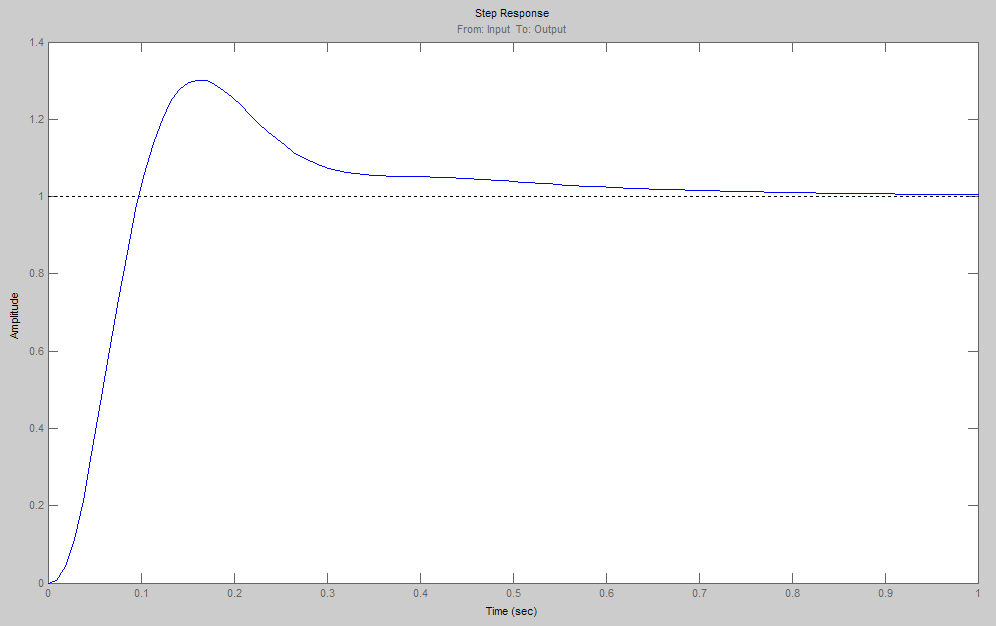
Рисунок 15. График переходной функции.
Вывод
В процессе выполнения курсового проекта была разработана система автоматического управления промышленным оборудованием, использующим двигатель ДПЦЯ, были построены функциональная и структурная схемы САУ, составлены передаточные функции элементов. По виду логарифмических характеристик были оценены запасы устойчивости по амплитуде и фазе, а также подсчитано время переходного процесса, которые оказались недостаточными по требованиям, предъявляемым заданием. После синтеза и применения последовательного корректирующего устройства (ПИ-регулятора) система обрела требуемые запасы устойчивости, при этом быстродействие (время переходного процесса) удовлетворяет заданию. Работа системы была смоделирована в системе MATLAB, полученные в ней характеристики подтвердили устойчивость системы, а значит и верность выполненных расчетов.
Список литературы
1. Воронов А. А. Основы теории автоматического управления –М.: Энергия, 1970.
2. Цыпкин Я. З. Основы теории автоматических систем.-М.: Наука,1977.
3. Белецкий А. Ф. Основы теории линейных электрических цепей.- М.: Связь, 1967.
4. Попов Е.П. Теория линейных систем автоматического регулирования и управления: Учеб пособие для вузов – М.: Наука, 1989.
5. Теория автоматического управления для «Чайников» - К.Ю. Поляков. Санкт-Петербург ,2008.
6. Основы теории автоматического управления: Учебное пособие/А. П. Зайцев.- Томск ,2000.
7. Теория автоматического управления - Электронный курс лекций для специальности 260601.65(120100) Технология машиностроения, Ставрополь, 2007 (http://cde.ncstu.ru/).