

1. Принцип построения и структура сау.
Система автоматического управления промышленного назначения (рисунок 1)
состоит из объекта управления, датчиков, управляющего устройства и исполнительных устройств. Для осуществления автоматического управления необходимо знать динамические свойства объекта управления. На основании этих свойств вырабатываются требования к датчикам, исполнительным и управляющим устройствам.
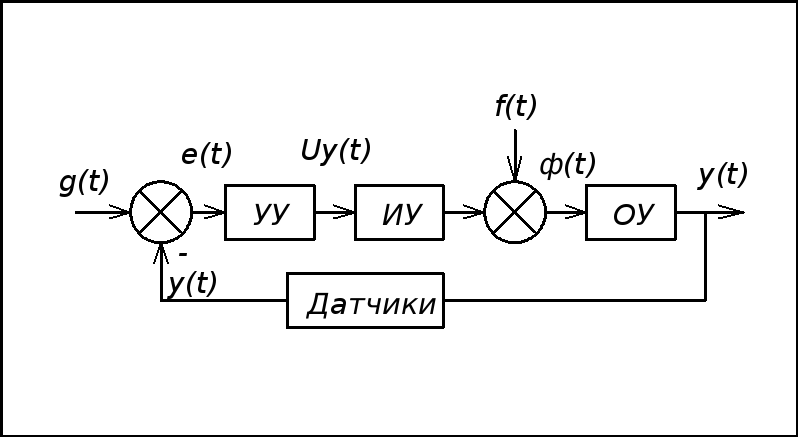
Рисунок 1. Структура типовой замкнутой САУ
На рисунке 1 y(t) - вектор управляемых величин, g(t) – вектор задающих величин, e(t) – величина отклонения текущего значения управляемой величины от заданной, Uy(t) – управляющее воздействие, f(t) – возмущение, φ(t) – управляющее воздействие, непосредственно прикладываемое к объекту управления.
В качестве объекта управления могут быть представлены – манипулятор робота, механизм подачи инструмента металлорежущего станка, термопечь, прокатный стан и т.д. Вследствие большого разнообразия управляемых объектов физическая природа управляемых величин y(t) различна. Это может быть напряжение, ток, температура, давление, линейное или угловое перемещение и т.д. В зависимости от изменения y(t) объекты управления могут быть устойчивыми, неустойчивыми, обладать запаздыванием, инерционностью, иметь упругие связи и т.д. Для создания САУ
необходимо знать свойства и особенности объектов управления. На основании этих свойств вырабатывают требования к датчикам, управляющим и исполнительным устройствам. Создание конструкций объектов управления относится к специалистам соответствующих отраслей и для специалистов по электронике и управлению объект управления считается заданным.
Датчики (измерительные устройства) должны в каждый момент времени выдавать информацию в удобной форме о величинах управляемых переменных y(t). Если САУ электронная, то это должны быть напряжения, токи, импульсы определённой частоты или амплитуды. В качестве датчиков могут быть использованы датчики температуры, давления, потенциометрические и индукционные датчики углового положения и т.д.
Сравнивающие и управляющие устройства вырабатывают требуемые значения g(t) управляемых величин y(t), получают от датчиков истинную информацию y*(t) о величинах y(t), сравнивают требуемые и действительные значения управляемых величин и на основании алгоритма управления формируют управляющие переменные Uy(t).
Приводы или исполнительные устройства воспринимают управляющие переменные Uy(y) и вырабатывают управляющие воздействия, непосредственно прикладываемые к объекту управления.
Раскроем типовую структуру САУ (рисунок 1) до функциональной схемы

Рисунок 2. Функциональная схема типовой САУ.
На рисунке 2 обозначено: ОУ - объект управления; СУq, СУφ, СУw - сравнивающие устройства (измерители рассогласования) координат q(t) объекта управления, угла поворота φ(t) электродвигателя w(t) соответственно; УУq, УУφ, УУw – управляющие устройства по соответствующим координатам; УП – усилитель-преобразователь; Д, 1/Р – электродвигатель постоянного тока; Р – редуктор; ДС, ДП, ДО – датчики скорости, положения (угла поворота) вала электродвигателя, координаты объекта.
Система (рисунок 2) состоит из трёх контуров. Первые два внутренних контура составляют САУ электропривода. Внешний контур – контур непосредственного управления производственным процессом.
Принцип работы системы следующий. Датчик объекта измеряет координату Uq(t), которая сравнивается в СУq с заданным значением Uзq(t). На основании этого вырабатывается рассогласование (ошибка) eq(t). По величине ошибки eq(t) управ ляющее устройство УУq вырабатывает управляющее воздействие Uзφ(t) – требуемое значение угла поворота электродвигателя φ(t), которое сведёт ошибку eq(t) к нулю. Оно сравнивается с текущим значением угла Uφ(t), которое измеряется датчиком угла. В результате сравнения вырабатывается ошибка eφ(t) в управляющем устройстве угла УУφ вырабатывается управляющее воздействие Uзc(t) – требуемое значение скорости поворота вала электродвигателя, которое сведёт ошибку eφ(t) к нулю. Требуемое значение Uзс(t) обрабатывается в первом внутреннем контуре – контуре регулирования скорости электродвигателя. Оно сравнивается с текущим значением скорости Uw(t), которое измеряет датчик скорости (ДС). В результате сравнения вырабатывается ошибка ew(t) в управляющем устройстве скорости УУw вырабатывается управляющее воздействие Uy(t). В зависимости от Uy(t) усилитель - преобразователь вырабатывает такое напряжение в цепи якоря электродвигателя Uя(t), которое сводит ошибку по скорости ew(t) к нулю.
Подавляющее большинство САУ являются сложными, многоструктурными, многосвязными системами. Расчёт и проектирование таких систем представляет собой сложную трудоёмкую задачу и начинается с получения математических моделей звеньев и системы.