

2. Получение математических моделей сау.
Динамика большинства производственных механизмов может быть описана дифференциальным уравнением второго порядка.
![]() (1)
(1)
где q(t) – управляемая переменная, φ(t) – угол поворота вала электродвигателя (рад), Т0 – постоянная времени объекта управления (с), ξ0 – дискремент затухания, К0 – коэффициент передачи объекта управления.
Применив преобразование Лапласа к уравнению (1) при нулевых начальных условиях, получим
![]() (2)
(2)
Из уравнения (2) получим передаточную функцию объекта
![]() (3)
(3)
В ряде случаев коэффициент Т02 на порядок, два порядка меньше коэффициента 2ξ0Т0, поэтому первым членом уравнения (1) пренебрегают. Кроме этого динамика большинства производственных процессов может быть описана апериодическим звеном
![]() (4)
(4)
Электродвигатель постоянного тока описывается системой уравнений
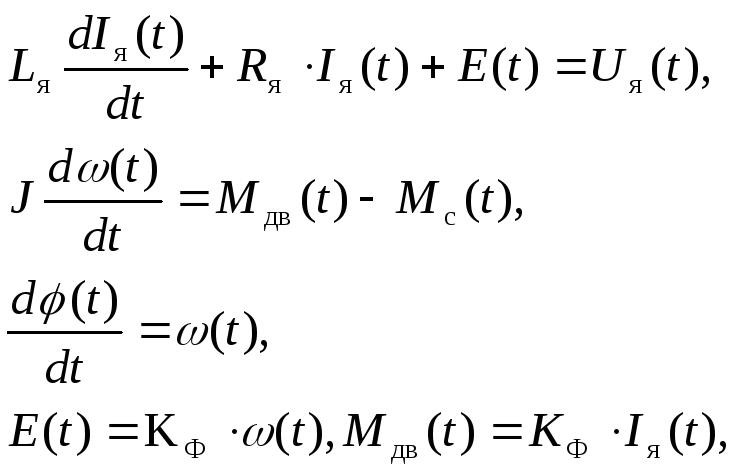 (5)
(5)
где Lя – индуктивность цепи якоря (Гн); Iя(t) – ток в цепи якоря (А); Rя - сопротивление цепи якоря (Ом); E(t) – ЭДС вращения (В); Uя(t) – напряжение цепи якоря (В); J – приведённый момент инерции (кг·м2); w(t) – угловая скорость вращения вала двигателя (рад/с); Мgв(t) – движущий момент на валу двигателя (Н·м); φ(t) – угол поворота (рад); КФ – коэффициент ЭДС (В·с).
Применив преобразование Лапласа для уравнений (5) при нулевых начальных
условиях и выполнив несложные преобразования, получим
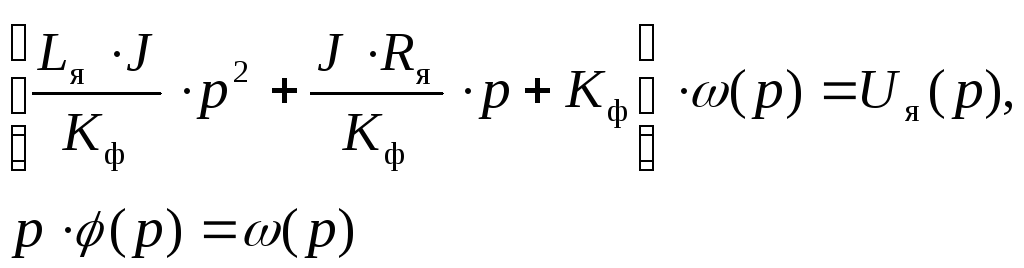 (6)
(6)
Разделим левую и правую части первого уравнения на КФ, умножим и разделим первый коэффициент первого уравнения на Rя
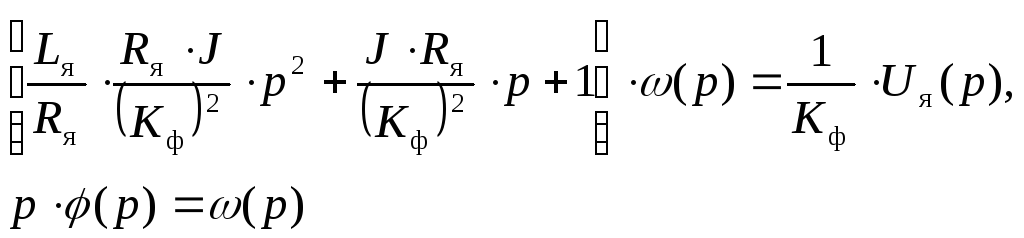 (7)
(7)
Введём обозначения Lя/Rя = Тэ – электромагнитная постоянная времени двигателя (с); J·Rя/(КФ)2 = Тм – электромеханическая постоянная времени двигателя (с); 1/КФ = КДВ – коэффициент передачи двигателя (рад/с).
Коэффициент ЭДС двигателя
![]() рад/с
рад/с
![]()
где Uн ,Iн ,wн , nн – номинальные значения параметров двигателя.
![]() с;
с;
![]() с;
с;
![]() .
.
Из выражения (7) получаем передаточные функции двигателя.
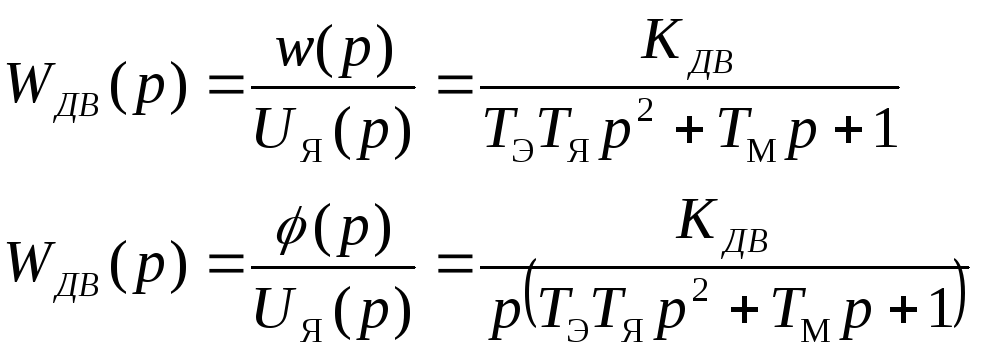 (8)
(8)
Передаточные функции (8) допускают упрощения. При Тм>Тэ передаточные функции (8) представляют в следующем виде
 (9)
(9)
Для многих двигателей Тэ·Тм<< Тм и передаточные функции упрощаются до звеньев
 (10)
(10)
Так как
![]() ,
передаточные функции двигателя принимают
вид
,
передаточные функции двигателя принимают
вид
 (11)
(11)
Линеаризованные уравнения усилителей – преобразователей имеют вид
![]() (12)
(12)
где Uя(t) – напряжение якорной цепи электродвигателя (В). Uу(t) – напряжение управления на входе усилителя – преобразователя (В). Тn – постоянная времени (с). Кn – коэффициент передачи.
Применим преобразование Лапласа к уравнению (12), получим передаточную функцию усилителя – преобразователя
![]() (13)
(13)
Подставив численные значения, получим
![]() (14)
(14)
Датчики считают безынерционными и описывают передаточными функциями
 (15)
(15)
Сравнивающие устройства описывают операторными уравнениями вида
 (16)
(16)
Математические модели управляющих устройств неизвестны. Их необходимо получить такими, чтобы они обеспечивали устойчивость и заданное качество управления.
Рассматриваемая типовая САУ является сложной многоконтурной системой. Для упрощения расчетов её целесообразно расчленить на три взаимосвязанные подсистемы
1. Схему автоматического регулирования скорости электропривода (САР ЭП).
2. Систему автоматического управления положением электропривода (САУ ПЭ).
3. Систему автоматического управления производственным оборудованием (САУ ПО).
В соответствии с функциональной схемой (рисунок 2) можно составить функциональные схемы вышеперечисленных систем. Состав звеньев систем приведён в таблице 3. Знак «плюс» означает наличие данного звена в соответствующей системе.
Таблица 3
|
звено
система |
cуq |
ууq |
cуφ |
ууφ |
суw |
ууw |
уп |
д |
|
оу |
дс |
дп |
до |
|
САУ СЭ |
|
|
|
|
+ |
+ |
+ |
+ |
|
|
+ |
|
|
|
САУ ПЭ |
|
|
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
+ |
+ |
|
|
САУ ПО |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
Проектирование системы начнем с внутреннего контура системы автоматического регулирования скорости электропривода. Затем переходим к проектированию системы автоматического управления положением электропривода. После этого переходим к проектированию системы автоматического управления промышленным оборудованием.