

4. Преобразование структурной схемы
 Для
упрощения структурной схемы перенесём
узел через два блока, по направлению
распространения сигнала, при этом в
контур добавляем два блока с обратными
передаточными функциями.
Для
упрощения структурной схемы перенесём
узел через два блока, по направлению
распространения сигнала, при этом в
контур добавляем два блока с обратными
передаточными функциями.
В ведём
новый блокW1
ведём
новый блокW1

 ;
;

5. Исследование устойчивости объекта
Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Если система неустойчива, то достаточно любого толчка, чтобы в ней начался расходящийся процесс ухода из исходного установившегося состояния.
Исследуем заданный объект на устойчивость при помощи программы MATLAB.
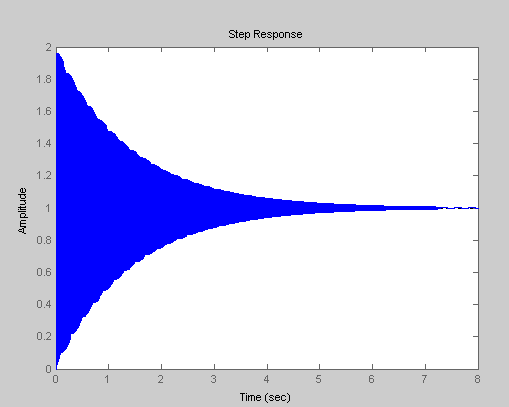
а) переходный процесс системы.

б) ЛАХ и ЛФХ системы.

в) АФЧХ системы.
 ЭВМ выдает график
переходного процесса, из графика видно,
что система при исходных данных находится
на границе устойчивости.
ЭВМ выдает график
переходного процесса, из графика видно,
что система при исходных данных находится
на границе устойчивости.
Для того, чтобы
добиться заданных показателей качества
(tp
= 0,6 с; коэффициент перерегулирования
![]() =25%)
вводим корректирующее устройство.
=25%)
вводим корректирующее устройство.
Для ввода корректирующего устройства необходимо найти общую передаточную функцию всей системы.
Передаточная функция системы:
![]()
6. Синтез сау
Получили, что передаточная функция системы имеет вид:

![]()
T1
= 0,05(c);
![]()
T2
= 0,462(c);
![]()
T3
= 0,07(c);
![]()
К =58246,7; 20∙lgK = 95;
По полученным данным строим неизменяемую ЛАХ и ЛФХ (Приложение).
Вычислим частоту среза и найдем передаточную функцию корректирующего устройства для исследования устойчивости объекта с помощью ЛАХ.
По номограмме Солодовникова определяем диапазон частоты среза в зависимости от заданного времени регулирования, уменьшенного на 25%
![]() ;
;
![]()
Желаемая ЛАХ
определяется показателями качества и
точностью процесса регулирования.
Среднечастотная часть желаемой ЛАХ
характеризуется частотой среза. Частота
среза определяется с помощью номограммы
Солодовникова. Для наиболее простой
 реализации
корректирующего устройства последовательные
изломы наклонов высокочастотной желаемой
ЛАХ и ЛАХ неизменяемой части системы
должны совпадать.
реализации
корректирующего устройства последовательные
изломы наклонов высокочастотной желаемой
ЛАХ и ЛАХ неизменяемой части системы
должны совпадать.
Так как система статическая, то добротность системы находится по следующим формулам:
Dw=1/C1 - добротность по скорости;
Dτ=2/C2 – добротность по ускорению;
ωk= Dw;
ωL=![]() ;
;
C1=![]()
![]() =
=![]()
Dw=![]()
Dτ=![]()
ωk=17;
ωL=![]()
Строим желаемую логарифмическую амплитудную характеристику (Приложение).
Найдем корректирующее устройство. Для нахождения корректирующего устройства необходимо вычесть неизменяемую ЛАХ из желаемой.
Из графика приложения видно, что:
![]()
![]()
![]()
![]()
![]()
![]()
20∙lg KКУ = 40; KКУ = 100;
Таким образом, получили, что передаточная функция корректирующего устройства имеет вид:

![]() ;
;
![]()
7. Расчет параметров корректирующего устройства
По виду передаточной функции корректирующего устройства определим схему корректирующего устройства.
![]() ;
;

![]()
 Выбираем
электрическую схему, передаточную
функцию типового корректирующего
устройства. Она будет содержать в себе
следующие электрические схемы:
Выбираем
электрическую схему, передаточную
функцию типового корректирующего
устройства. Она будет содержать в себе
следующие электрические схемы:
1.
![]()

K = 1;
T1 = (1+ R1 / R2)·T2;
T2 = R2 ∙C2;
Таким образом, получили, что:
R1 = 20(кОм);
R2 = 1 (кОм);
C = 0,05 (Ф);
2 .
.
![]()
k = 1 / R1∙C;
T = R2 ∙ C;
Таким образом, получили, что:
R1 = 3 (Ом);
R2 = 1,54 (Ом);
C = 0,3 (Ф);
3 .
.![]()
![]()







C =
0,0462 (Ом); Uвх
Uвых
=
0,0462 (Ом); Uвх
Uвых
R












 =10
(Ом);
=10
(Ом);






 C1
C1


 R1
R1
 Реализация
передаточной функции корректирующего
устройства через четырёхполюсники,
имеет вид:
Реализация
передаточной функции корректирующего
устройства через четырёхполюсники,
имеет вид:





 R1 R3
R1 R3

























 C1
Uвых
C1
Uвых
U вх
R2 R4 C2
вх
R2 R4 C2















 C3
C3







 R5
R5
Где:
R1=20 (кОм);
R2=1 (кОм);
R3=3 (Ом);
R4=1,54 (Ом);
R5= 10 (Ом);
С1=0,05 (Ф);
C2=0,3 (Ф);
C3=0,0462(Ф);
 При
коррекции с помощью интегрирующих
устройств система менее подвержена
влиянию помех.
При
коррекции с помощью интегрирующих
устройств система менее подвержена
влиянию помех.