

Метод синтеза оптимальных систем управления с использованием обратной связи
В данном разделе мы рассмотрим метод синтеза оптимальных систем управления с использованием обратной связи по состоянию и интегральных квадратичных оценок качества.
Управляющие Переменные
с

 игналы
состоянияu1x1
игналы
состоянияu1x1

 u2 Системаx2
u2 Системаx2
у




 правления
правления
un
 xn
xn
Рис. 11.4 Система
управления, описываемая переменными
х и u
Рассмотрим
систему управления, изображенную на
рис. 11.4, которая описывается
векторно-матичным дифференциальным
уравнением
![]() .
(11.5)
Выберем регулятор в цепи обратной
связи так, чтобы и было некоторой
функцией измеряемых переменных
состояния, т. е.
.
(11.5)
Выберем регулятор в цепи обратной
связи так, чтобы и было некоторой
функцией измеряемых переменных
состояния, т. е.![]() .
Например, можно сформировать компоненты
вектора управления как
.
Например, можно сформировать компоненты
вектора управления как![]() ,
,![]() , ……,
, ……,![]() (11.6)
Или:
(11.6)
Или:![]() ,
,![]() ,
….. (11.7)
Выбор управляющих сигналов
является достаточно произвольным и
зависит от конкретного качества, которое
необходимо обеспечить, и от того, сколь
сложной допускается иметь структуру
обратной связи. Количество переменных
состояния, используемых для формирования
управляющих сигналов, часто является
ограниченным, т. к. не все они могут быть
доступны непосредственному измерению.
В
нашем случае мы будем считать, что
управление и является линейной
комбинацией переменных состояния, т.
е.
,
….. (11.7)
Выбор управляющих сигналов
является достаточно произвольным и
зависит от конкретного качества, которое
необходимо обеспечить, и от того, сколь
сложной допускается иметь структуру
обратной связи. Количество переменных
состояния, используемых для формирования
управляющих сигналов, часто является
ограниченным, т. к. не все они могут быть
доступны непосредственному измерению.
В
нашем случае мы будем считать, что
управление и является линейной
комбинацией переменных состояния, т.
е.![]() ,
где
,
где![]() — матрица размерности mxn.
В развернутой форме это выглядит так:
— матрица размерности mxn.
В развернутой форме это выглядит так:
 (11.8)
Подставляя (11.8) в (11.5), получим:
(11.8)
Подставляя (11.8) в (11.5), получим:
![]() ,
(11.9)
где Н—матрица размерностиnxn,
получаемая путем сложения элементов
матриц А и ВК.
,
(11.9)
где Н—матрица размерностиnxn,
получаемая путем сложения элементов
матриц А и ВК.
Возвращаясь к
интегральным квадратичным оценкам
качества, в случае одной переменной
состояния мы можем записать
![]() .
(11.10)
В случае двух переменных состояния
интегральная квадратичная оценка будет
иметь вид:
.
(11.10)
В случае двух переменных состояния
интегральная квадратичная оценка будет
иметь вид:![]() (11.11)
Поскольку мы собираемся
представить оценку качества в виде
интеграла от суммы квадратов переменных
состояния, то для этого можно
воспользоваться следующей матричной
операцией:
(11.11)
Поскольку мы собираемся
представить оценку качества в виде
интеграла от суммы квадратов переменных
состояния, то для этого можно
воспользоваться следующей матричной
операцией: (11.12)
где
х есть результат транспонирования
матрицы х. Тогда оценку качества можно
представить в функции от вектора
состояния:
(11.12)
где
х есть результат транспонирования
матрицы х. Тогда оценку качества можно
представить в функции от вектора
состояния:![]() Оценка
качества общего вида (11.4) включает в
себя также управление и, но пока этого
делать не будем, оставив для обсуждения
в дальнейшем.
Теперь в (11.13) мы положим
конечное время управления
Оценка
качества общего вида (11.4) включает в
себя также управление и, но пока этого
делать не будем, оставив для обсуждения
в дальнейшем.
Теперь в (11.13) мы положим
конечное время управления![]() .
Для получения минимального значения
J будем считать, что существует
производная
.
Для получения минимального значения
J будем считать, что существует
производная
![]() (11.14)
где
матрица Р нуждается в определении.
Чтобы упростить алгебраические
преобразования, без потери общности
матрицу Р можно выбрать симметричной.
Симметричность этой матрицы означает,
что
(11.14)
где
матрица Р нуждается в определении.
Чтобы упростить алгебраические
преобразования, без потери общности
матрицу Р можно выбрать симметричной.
Симметричность этой матрицы означает,
что![]() Выполняя
дифференцирование в левой части
выражения (11.14), получим:
Выполняя
дифференцирование в левой части
выражения (11.14), получим:
![]()
Подставляя сюда
(11.9), запишем:
![]() (11.15)
(11.15)
где ![]() по
правилу транспонирования произведения
матриц. Если положить
по
правилу транспонирования произведения
матриц. Если положить ![]() ,
то (11.15) примет вид:
,
то (11.15) примет вид:
![]() (11.16)
что совпадает с производной,
которую мы определили в виде (11.14).
Подставляя теперь (11.16) в (11.13), получим:
(11.16)
что совпадает с производной,
которую мы определили в виде (11.14).
Подставляя теперь (11.16) в (11.13), получим:
![]()
 При подстановке верхнего предела
интегрирования мы предполагали, что
система устойчива и, следовательно,
При подстановке верхнего предела
интегрирования мы предполагали, что
система устойчива и, следовательно,![]() .
Таким образом, чтобы минимизировать
оценку качества J, мы должны рассмотреть
два уравнения:
.
Таким образом, чтобы минимизировать
оценку качества J, мы должны рассмотреть
два уравнения:
![]() (11.18)
и
(11.18)
и![]() (11.19)
Таким образом, процедура
синтеза сводится к двум этапам:
1.
Считая матрицу Н известной, определить
матрицу Р, удовлетворяющую уравнению
(11.19).
2. Минимизировать J, найдя минимум
выражения (11.18) путем настройки одного
или нескольких параметров системы.
Пример 11.5.
Обратная связь по состоянию
Рассмотрим
систему управления, представленную в
виде графа на рис. 11.5. Переменные
состояния обозначены как х1
и х2.
Качество этой системы нельзя считать
приемлемым, потому что при ступенчатом
входном сигнале или при возмущении
того же типа реакция системы имеет
неограниченно возрастающий характер.
Система описывается дифференциальным
уравнением
(11.19)
Таким образом, процедура
синтеза сводится к двум этапам:
1.
Считая матрицу Н известной, определить
матрицу Р, удовлетворяющую уравнению
(11.19).
2. Минимизировать J, найдя минимум
выражения (11.18) путем настройки одного
или нескольких параметров системы.
Пример 11.5.
Обратная связь по состоянию
Рассмотрим
систему управления, представленную в
виде графа на рис. 11.5. Переменные
состояния обозначены как х1
и х2.
Качество этой системы нельзя считать
приемлемым, потому что при ступенчатом
входном сигнале или при возмущении
того же типа реакция системы имеет
неограниченно возрастающий характер.
Система описывается дифференциальным
уравнением
 (11.20)
т.е.
(11.20)
т.е.
![]() и
и![]()
Управляющий сигнал
выберем в виде линейной комбинации
двух переменных состояния:
![]() (11.21)
(11.21)
Обратите внимание, что знаки в правой части (11.21) выбраны так, чтобы обратная связь была отрицательной. Тогда (11.20) примет вид:
![]() ,
,
![]() ,(11.22)
,(11.22)
или, в матричной форме.
![]() (11.23)
Заметим, что если речь идет о системе
управления положением, то переменная
х1
соответствует положению, передаточная
функция системы
(11.23)
Заметим, что если речь идет о системе
управления положением, то переменная
х1
соответствует положению, передаточная
функция системы ![]() ,
где М = 1, а трение считается пренебрежимо
малым. Чтобы избежать излишних
алгебраических операций, выберем
значение
,
где М = 1, а трение считается пренебрежимо
малым. Чтобы избежать излишних
алгебраических операций, выберем
значение
к1
= 1 и определим к2
так, чтобы минимизировать оценку
качества. Тогда, используя (11.19), запишем:
![]()
или
 (11.24)
Произведя умножение и сложение
матриц и учитывая, что
(11.24)
Произведя умножение и сложение
матриц и учитывая, что![]() (матрица Р — симметричная), придем к
системе уравнений
(матрица Р — симметричная), придем к
системе уравнений
![]()
![]()
![]() (11.25)
Эта система имеет следующее
решение:
(11.25)
Эта система имеет следующее
решение:
![]() ,
,![]() ,
, Интегральная оценка качества
Интегральная оценка качества
![]() (11.26)
и
мы рассмотрим случай, когда в начальный
момент времени каждая из переменных
состояния имеет отклонение от положения
равновесия на 1,т. е.
(11.26)
и
мы рассмотрим случай, когда в начальный
момент времени каждая из переменных
состояния имеет отклонение от положения
равновесия на 1,т. е.![]() .
Тогда (11.26) примет вид:
.
Тогда (11.26) примет вид:
 (11.27)
Подставляя в (11.27) элементы матрицы Р,
получим:
(11.27)
Подставляя в (11.27) элементы матрицы Р,
получим:
 (11.28)
Чтобы найти к2,
соответствующее минимуму J, продифференцируем
J по к2
и приравняем производную нулю:
(11.28)
Чтобы найти к2,
соответствующее минимуму J, продифференцируем
J по к2
и приравняем производную нулю:
 (11.29)
Отсюда
(11.29)
Отсюда ![]() и
и![]() .
Минимальное значение J
найдем, подставив
.
Минимальное значение J
найдем, подставив ![]() в (11.28):
в (11.28):
![]() Матрица
Н для скорректированной системы примет
вид:
Матрица
Н для скорректированной системы примет
вид:
![]() .(11.30)
Следовательно,
характеристическое уравнение замкнутой
системы будет равно
.(11.30)
Следовательно,
характеристическое уравнение замкнутой
системы будет равно
![]() (11.31)
Поскольку система имеет второй
порядок, то ее характеристический
полином имеет вид
(11.31)
Поскольку система имеет второй
порядок, то ее характеристический
полином имеет вид ![]() ,
откуда следует, что коэффициент затухания
замкнутой системы
,
откуда следует, что коэффициент затухания
замкнутой системы ![]() .
Можно считать, что скорректированная
система является оптимальной, т. к.
оценка качества в ней имеет минимальное
значение. Однако следует отдавать отчет
в том, что система является оптимальной
только при определенном сочетании
начальных условий. Граф скорректированной
системы изображен на рис. 11.6. Зависимость
оценки качества от параметра к2
приведена на рис. 11.7. Из графика видно,
что система обладает малой чувствительностью
к изменению к2
.
Можно считать, что скорректированная
система является оптимальной, т. к.
оценка качества в ней имеет минимальное
значение. Однако следует отдавать отчет
в том, что система является оптимальной
только при определенном сочетании
начальных условий. Граф скорректированной
системы изображен на рис. 11.6. Зависимость
оценки качества от параметра к2
приведена на рис. 11.7. Из графика видно,
что система обладает малой чувствительностью
к изменению к2


при малых
отклонениях этого параметра от
оптимального значения. Определим
чувствительность оптимальной системы
как
 (11.32)
где к — параметр, выбираемый
при синтезе. Тогда в нашем случае мы
имеем
(11.32)
где к — параметр, выбираемый
при синтезе. Тогда в нашем случае мы
имеем
![]() и
и (11.33)
(11.33)
Псевдоколичественный метод синтеза системы с обратной связью В количественной теории обратной связи робастность системы управления достигается за счет надлежащего выбора регулятора Gc(s), как показано на рис. 12.31. Цель синтеза при этом заключается в обеспечении широкой полосы пропускания замкнутой системы за счет большого значения коэффициента усиления К. Типичные методы синтеза при этом включают в себя графические и численные процедуры в сочетании с использованием диаграммы Никольса. Обычно количественные методы синтеза систем приводят к необходимости иметь большой коэффициент усиления в контуре и достаточный запас по фазе, которые и должны гарантировать робастность системы. В этом разделе мы обсудим простой метод реализации количественной обратной связи, позволяющий с помощью корневого годографа выбрать коэффициент усиления К и регулятор Gc(s). Этот метод, очень похожий на псевдоколичественный, включает в себя следующие этапы:
Разместить на s-плоскости n полюсов и m нулей передаточной функции G(s), имеющей n-ый порядок. Дополнить картину какими-либо полюсами Gc(s).
Начиная с области, ближайшей к началу координат, разместить нули Gc(s)непосредственно слева от каждого из (n - 1) полюсов в левой половине s-плоскости. Один полюс должен остаться далеко слева.
Увеличить коэффициент К так, чтобы корни характеристического уравнения (полосы передаточной функции замкнутой системы) оказались близко к нулям функции GcG(s) .




R






 (s) K Gc(s) G(s) Y(s)
(s) K Gc(s) G(s) Y(s)



Рис. 12.31 Система с обратной связью
Этот метод позволяет задать нули таким образом, чтобы все ветви корневого годографа кроме одной заканчивались в конечных нулях. Если коэффициент К будет достаточно большим, то полюсы T(s) окажутся почти равными нулям GcG(s). В результате при разложении T(s) на простые дроби останется практически один член, коэффициент при котором, найденный с помощью вычетов, будет иметь наибольшее значение, и именно этот член будет в основном определять реакцию системы. Ясно, что в этом случае запас по фазе будет приблизительно равен 90° (в действительности около 85°). Пример 12.12. Синтез системы псевдоколичественным методом Рассмотрим систему, изображенную на рис. 12.31, в которой
![]()
причем номинальные
значения ![]() = 1 и
= 1 и ![]() = 2, а отклонения этих параметров могут
составлять ± 50 %. Худшему случаю
соответствуют значения
= 2, а отклонения этих параметров могут
составлять ± 50 %. Худшему случаю
соответствуют значения ![]() =
0,5 и
=
0,5 и ![]() = 1. Требуется, чтобы при ступенчатом
входном сигнале установившаяся ошибка
равнялась нулю. Для решения задачи мы
используем ПИД-регулятор с передаточной
функцией
= 1. Требуется, чтобы при ступенчатом
входном сигнале установившаяся ошибка
равнялась нулю. Для решения задачи мы
используем ПИД-регулятор с передаточной
функцией
![]() Здесь мы воспользовались принципом
внутренней модели и включили
Здесь мы воспользовались принципом
внутренней модели и включили ![]() в состав передаточной
функции GcG(s).
Согласно этапу 1 процедуры синтеза
разместим на s-плоскости
полюсы GcG(s).,
как показано на рис. 12.32. Эти три полюса
находятся в точках s = 0, -1, и -2. Согласно
этапу 2 один нуль поместим слева от
полюса в начале координат, а другой —
слева от полюса в точке -1, как показано
на рис. 12.32.
в состав передаточной
функции GcG(s).
Согласно этапу 1 процедуры синтеза
разместим на s-плоскости
полюсы GcG(s).,
как показано на рис. 12.32. Эти три полюса
находятся в точках s = 0, -1, и -2. Согласно
этапу 2 один нуль поместим слева от
полюса в начале координат, а другой —
слева от полюса в точке -1, как показано
на рис. 12.32.
П ередаточная
функция регулятора примет вид:
ередаточная
функция регулятора примет вид:![]() (12.68)
Выберем K=
100, чтобы корни характеристического
уравнения оказались вблизи нулей. Тогда
передаточная функция замкнутой системы
будет равна
(12.68)
Выберем K=
100, чтобы корни характеристического
уравнения оказались вблизи нулей. Тогда
передаточная функция замкнутой системы
будет равна
![]()
Рис. 12.32
Корневой
годограф для K GcG(s)
Полученная система обладает высоким
быстродействием, а запас по фазе в ней
приблизительно равен 85°. Основные
показатели качества приведены в табл.
12.10
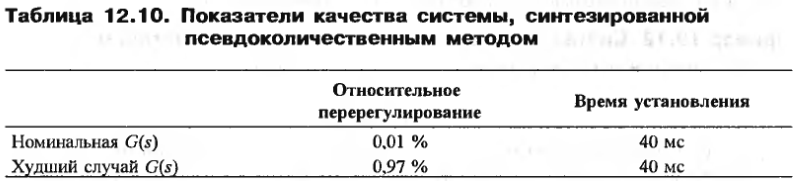 Если взять худший случай (р1
= 0,5 и р2
= 1), то, как видно из табл. 12.10, качество
системы существенно не изменится. Таким
образом, псевдоколичественный метод
позволяет синтезировать систему с
высокой степенью робастности.
Если взять худший случай (р1
= 0,5 и р2
= 1), то, как видно из табл. 12.10, качество
системы существенно не изменится. Таким
образом, псевдоколичественный метод
позволяет синтезировать систему с
высокой степенью робастности.
Заключение
Развитие систем управление идет по пути совершенствования их гибкости и обеспечения высокой степени автономности. В достижении этих целей можно наметить два разных пути. Считается, что современный промышленный робот является абсолютно автономным, т.к. будучи изначально запрограммированным, он не требует дальнейшего вмешательство в его работу. Из-за ограниченных возможностей чувствительных органов робототехнические системы обладают недостаточной гибкостью в приспособлении к изменению условий эксплуатации. Это в свою очередь, стимулирует разработку устройств технического зрения. Системы управления обладают достаточной приспосабливаемостью, но лишь при участии человека-оператора. Совершенствование робототехнических систем идет за счет оснащения их чувствительным элементами обратной связи с улучшенными характеристиками. Исследовательские работы в области искусственного интеллекта, датчиков, компьютерного зрения, программирования комплексов компьютеризированного проектирования и производства должны сделать эти системы более универсальными и экономными. Чтобы уменьшить нагрузку на человека-оператора и повысить эффективность его работы, ведутся интенсивные исследования в области супервизорного управления, человеко-машинного интерфейса и управления компьютерными базами данных. Многие исследования одинаково полезны для совершенствования как роботов, так и систем управления; их цель состоит в снижении затрат на изготовление и расширении в области применения. Они связаны также с улучшением методов передачи информации и дальнейшим развитием языков программирования.
Список использованной литературы.
Современные системы управления / Р. Дорф, Р. Бишоп. Пер. с англ. Б.И. Копылова.-М.:Лаборатория Базовых Знаний,2002.-832с.: ил.
Основы теории автоматических систем / Я. З. Цыпкин. Изд-во «Наука», М.:1987,560стр.
Теория систем автоматического регулирования/В. Л. Бесекерский и Е. П. Попов. Изд-во «Наука», М.:1975 г, 767стр.
www.publ.lib.ru
www.nglib.ru/