

Отрицательные обратные связи
Управление с использованием обратной связи — это неоспоримый факт нашей повседневной жизни. Управлять автомобилем очень приятно, когда машина мгновенно реагирует на действия водителя. Многое автомобили с этой целью оснащены гидроусилителями руля и тормозов. Простая блок-схема системы управления движением автомобиля изображена на рис. 1.8 (а).
Ж



 елаемое
+
Действительное
елаемое
+
Действительное
н



 аправление
Водитель Рулевой
механизм Автомобиль
направление
аправление
Водитель Рулевой
механизм Автомобиль
направление
д вижения
-
движения
вижения
-
движения

Визуальные и тактильные

 средства измерения
средства измерения
Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка, как показано на рис, 1.5 (б).
1.5 (Б)
Информация о действительном направлении поставляется за счет визуальной и тактильной (телодвижение) обратной связи. Дополнительная обратная связь образуется Ощущением рулевого колеса руками водителя (датчиком)- Эта система с обратной связью является аналогом хорошо известных систем управления курсом океанского лайнера или большого пассажирского самолета. На рис. 1.5 (в) изображена типичная реакция автомобиля на действия водителя.
1.5 (В)
Системы управления функционируют по замкнутому циклу, как показано на рис. 1.6. Если датчик является точным, та измеренное значение выхода системы равно его действительному значению. Разность между желаемым и действительным значениями выходной переменной, т. е. ошибка, поступает на управляющее устройство (например, усилитель). С его выхода сигнал поступает на исполнительное устройство, которое воздействует на объект управления таким образом, чтобы уменьшить ошибку. Например, если корабль пытается отклониться от курса вправо, руль привалится в движение так, чтобы повернуть корабль влево.
В

 ход
ошибка
ход
ошибка
ж


 елаемое
+ Управляющее
Исполнтельное Объект
Действительное
елаемое
+ Управляющее
Исполнтельное Объект
Действительное
з


 начение
_ устройство
устройство управление
значение
начение
_ устройство
устройство управление
значение
выхода выхода

Датчик

 измерение
значение выхода Обратная
связь
измерение
значение выхода Обратная
связь
рис. 1.6
Система на рис. 1.6 — это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного, а разность подается на вход усилителя.

Отрицательные обратные связи. Отрицательные корректирующие обратные связи очень часто используются для охвата исполнительных двигателей и серводвигателей (вспомогательных двигателей). В связи с этим рассмотрим наиболее важные случаи.
На рис. 10.10 изображено несколько случаев охвата электродвигателя отрицательной обратной связью. Схема на рис. 10.10, а соответствует использованию линейного потенциометра Я, сцепленного через редуктор Р с валом двигателя Д. Напряжение, снимаемое с потенциометра, поступает на вход усилителя, от которого управляется двигатель. Пусть передаточная функция двигателя совместно с усилителем соответствует интегрирующему звену с замедлением;
![]() (10.24)
(10.24)
где
![]() —
электромеханическая постоянная времени.
—
электромеханическая постоянная времени.
Передаточная
функция цепи обратной связи
![]() равна
коэффициенту передачи потенциометра.
Результирующая передаточная функция
в соответствии с формулой (10.3) будет
равна
коэффициенту передачи потенциометра.
Результирующая передаточная функция
в соответствии с формулой (10.3) будет
![]() (10.25)
(10.25)
где
![]() ,
,
![]() ,
,![]()
В этом
случае имеется жесткая обратная связь,
так как
![]() ,
которая
превращает интегрирующее звено с
замедлением, передаточная функция
которого имеет вид (10.24), в колебательное
звено с передаточной функцией (10.25). Чем
больше коэффициент усиления по петле
обратной связи
,
которая
превращает интегрирующее звено с
замедлением, передаточная функция
которого имеет вид (10.24), в колебательное
звено с передаточной функцией (10.25). Чем
больше коэффициент усиления по петле
обратной связи
![]() ,
тем
выше будет частота недемпфированных
колебаний звена
,
тем
выше будет частота недемпфированных
колебаний звена
![]() и
тем меньше параметр затухания
и
тем меньше параметр затухания
![]() .
.
Аналогичный результат можно получить, если вместо обратной связи установить на выходном валу пружину, развивающую момент, пропорциональный углу поворота вала.
Схема
на рис. 10.10, б
соответствует
использованию в цепи обратной связи
тахогенератора ТГ.
В
этом случае
![]() ,
,
где
![]() —
коэффициент
передачи тахогенератора.
—
коэффициент
передачи тахогенератора.
Результирующая передаточная функция в соответствии с (10.3) будет
![]() ,
(10.26)
,
(10.26)
где
![]() и
и![]()
Передаточная
функция (10.26) отличается от исходной
передаточной функции (10.24) только
уменьшением в
![]() раз
коэффициента передачи и постоянной
времени. Если в соответствии с (10.24) в
качестве выходной величины рассматривать
угол поворота вала двигателя
раз
коэффициента передачи и постоянной
времени. Если в соответствии с (10.24) в
качестве выходной величины рассматривать
угол поворота вала двигателя
![]() ,
то
эта обратная связь является гибкой,
так как
,
то
эта обратная связь является гибкой,
так как
![]() .
.
Для
схемы, изображенной на рис. 10.10, б, в
качестве выходной величины можно
рассматривать скорость вращения
двигателя. Тогда обратная связь по
напряжению тахогенератора оказывается
жесткой, и в этом случае
![]()
В соответствии с табл. 10.4 (№ 5) этот случай аналогичен включению последовательного пассивного дифференцирующего звена. Аналогичный результат может быть получен при установке на валу двигателя демпфера, развивающего момент сопротивления, пропорциональный скорости вращения (скоростное трение). В этом случае коэффициент передачи и постоянная времени двигателя уменьшатся в одинаковое число раз.
На
рис. 10.10, в
изображено
введение обратной связи по ускорению.
В этом случае передаточная функция
цепи обратной связи будет
![]()
где
![]() = KC
— постоянная) времени дифференцирующего
конденсатора,
= KC
— постоянная) времени дифференцирующего
конденсатора,
![]() —
коэффициент передачи тахогенератора.
—
коэффициент передачи тахогенератора.
Результирующая передаточная функция для этого случая, в соответствии с формулой (10.3), будет
![]() (10.27),
(10.27),
В соответствии с табл. 10.4 (№ 6)! этот случай аналогичен включению последовательного интегро-дифференцирующего звена.
Представляет
интерес рассмотрение частного случая,
когда можно приближенно считать
дифференциатор идеальным (рис. 10.10, в).
Тогда
передаточная функция цепи обратной
связи будет
![]() ,
а
результирующая передаточная функция
двигателя совместно с обратной связью
примет вид
,
а
результирующая передаточная функция
двигателя совместно с обратной связью
примет вид
![]() ,
(10.28)
,
(10.28)
где
![]() —
результирующая электромеханическая
постоянная времени двигателя.
—
результирующая электромеханическая
постоянная времени двигателя.
Из формулы (10.28) видно, что обратная связь по ускорению эквивалентна установке на валу двигателя дополнительного маховика, увеличивающего электромеханическую постоянную времени двигателя.
На рис. 10.11 показано введение обратной связи в гидравлическом серводвигателе. Случай, изображенный на рис. 10.11, а, соответствует жесткой отрицательной обратной связи или так называемому серводвигателю с выключателем.

рис. 10.10
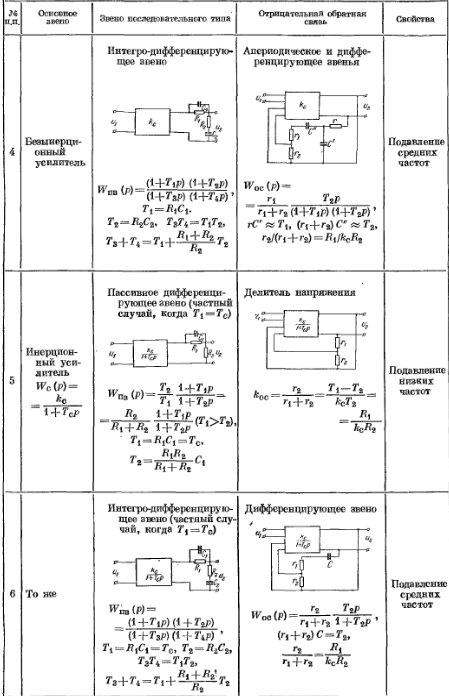
рис. 10.10
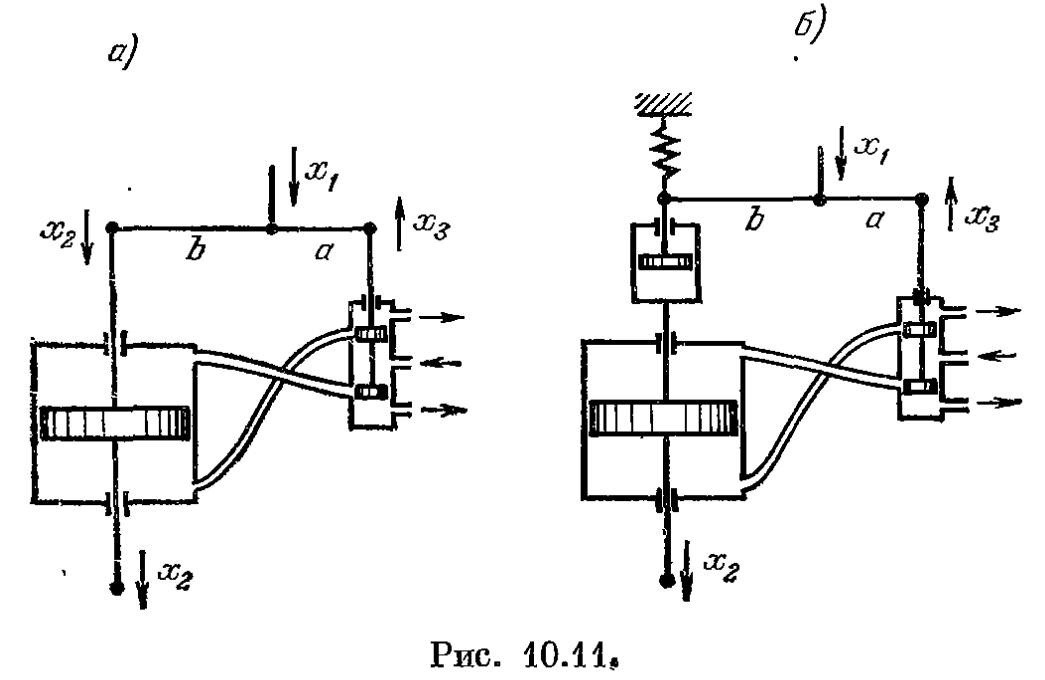
Передаточная
функция серводвигателя без обратной
связи, определяемая по отношению
перемещений
![]() и
и
![]() ,
соответствует (10.24). Передаточная
функция цепи обратной связи
,
соответствует (10.24). Передаточная
функция цепи обратной связи
![]()
где
![]() и
и
![]() —
плечи рычага. В результате этот случай
сводится к рассмотренной выше схеме,
изображенной на рис. 10.10, а. Результирующая
передаточная функция будет совпадать
с (10.25).
—
плечи рычага. В результате этот случай
сводится к рассмотренной выше схеме,
изображенной на рис. 10.10, а. Результирующая
передаточная функция будет совпадать
с (10.25).
Рис. 10.11, б соответствует гибкой обратной связи, передаточная функция которой
![]() ,
,
где
![]() — постоянная времени дифференцирующего
устройства, состоящего из демпфера и
пружины (см. рис. ниже)
— постоянная времени дифференцирующего
устройства, состоящего из демпфера и
пружины (см. рис. ниже)
Результирующая передаточная функция в соответствии с формулой (10.3) будет
 ,
(10.29)
,
(10.29)
где
![]() ,
,
![]() ,
,![]() .
.
Из
формулы (10.29) видно, что подобная гибкая
обратная связь сохраняет интегрирующие
свойства серводвигателя, уменьшает
его коэффициент передачи, вводит
производную в соответствии с членом
![]() и
образует колебательное звено с
частотой недемпфированных колебаний
и
образует колебательное звено с
частотой недемпфированных колебаний
![]() и
параметром затухания
и
параметром затухания
![]() .
Если частота
.
Если частота
![]() достаточно
велика, то выражение (10.29) можно приближенно
записать в виде
достаточно
велика, то выражение (10.29) можно приближенно
записать в виде
![]() (10.30)
(10.30)
Передаточная
функция (10.30) совпадает с передаточной
функцией изодромного устройства
![]() ,(9.10)
В связи с этим гибкую обратную связь,
называют иногда изодромной обратной
связью.
,(9.10)
В связи с этим гибкую обратную связь,
называют иногда изодромной обратной
связью.