

курсовая работа / sintez_sledyashey_sistemy_avtomaticheskogo_regulirovaniya_ob
.pdf3. Вычитаем характеристики друг из друга, получаем ЛАХ корректирующего звена.
Находим сопрягающие частоты ЛАХ корректирующего звена
ωa := 0.01 |
с− 1 |
ωb := 0.25 |
с− 1 |
ωc := 2.58 |
с− 1 |
ωd := 3.12 |
с− 1 |
ωe := 80 |
с− 1 |
|
|
Передаточная функция имеет вид |
|
|
|
|
|
|
|
|
s |
|
|
s |
|
|
|
|
s |
|
|||||
|
|
|
|
|
|
|
+ 1 |
|
|
|
+ |
1 |
|
|
|
+ 1 |
|
||
|
|
ωb |
|
|
ωd |
||||||||||||||
W |
|
(s) := |
|
|
|
ωc |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
к |
|
|
|
s |
|
|
|
|
s |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
+ |
1 |
|
|
|
+ |
1 |
|
|
|
|
|
|
|
|
|
|
|
ωa |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
ωe |
|
|
|
|
||||||
W |
|
(s) := |
.497 s3 + 2.96 s2 + 4.71 s + 1.00 |
||||||||||||||||
|
|
||||||||||||||||||
к |
|
.156e-1 |
s3 + 2.50 s2 + 100. s + 1.00 |
||||||||||||||||
|
|
|
|||||||||||||||||
Передаточная функция разомкнутой системы
Wp(s) := W(s) Wк(s)
Wp(s) := |
369.623 (4. s + 1.) |
|
|
||
.659e-5 s5 + .626e-2 s4 + .876 s3 + 33.4 s2 + 1.00 s |
||
|
24
Замкнутая система |
|
|
|
|
|
|
|
|||||
Wз(s) := |
|
Wp(s) |
|
|
|
|
|
|
|
|
||
1 |
+ Wp(s) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
Wз(s) := |
|
|
|
|
4. s + 1. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
.178e-7 s5 + .169e-4 s4 + .237e-2 s3 + .903e-1 s2 + 4.00 s + 1.00 |
||||||||||
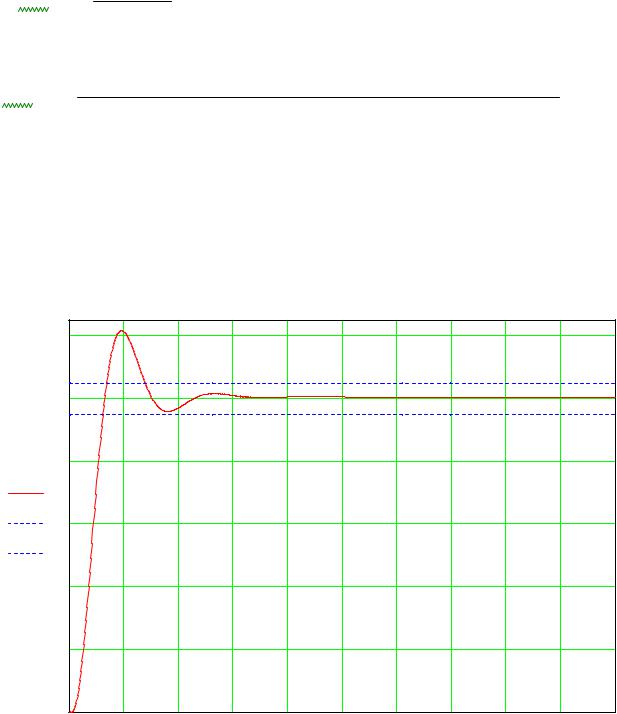
График переходного процесса для замкнутой системы строим при |
|
|||||||||||
промощи пакета MATLAB (см. рис.3) |
|
|
|
|
|
|||||||
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
h(t) |
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.95 |
0.6 |
|
|
|
|
|
|
|
|
|
|
|
1.05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
Рис. 3 Переходный процесс системы |
|
|
||||
25
Из рисунка видно, что синтезированная система удовлетворяет всем требованиям:
-время регулирования составляет 0.14 с;
-перерегулирование составляет 22%;
-система устойчива, т.к. ЛФХ разомкнутой системы (см. рис. 2) пересекает 180 градусов позже, чем ЛАХ - отметку 0 дБ.
26
ЗАКЛЮЧЕНИЕ
Произведен синтез дистанционной следящей системы автоматического регулирования объектом. Построена модель объекта, выбран регулятор. Оптимальные параметры настройки определены частотным методом. Синтезированная система удовлетворяет всем предъявляемым требованиям: время регулирования 0,13 с, перерегулирование не превышает 22%.
27
СПИСОК ЛИТЕРАТУРЫ
1.Теория автоматического управления: В 2 ч. Ч. 1. Теория линейных систем автоматического управления / Под ред. А.А, Воронова. – 2- е изд., перераб. и доп. – М.: Высш. шк., 1986.
2.Юревич Е.И. Теория автоматического управления. – Л.: Энергия, 1975.
3.Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. – М.: Наука, 1975.
4.Накладка средств автоматизации и автоматических систем регулирования: Справочное пособие /А.С. Клюев, А.Т. Лебедев и др.; Под ред. А.С. Клюева.-2-е изд. перераб. и доп. –М: Энергоатомиздат, 1989.
5.Егоров К.В. Основы теории автоматического регулирования, учебное пособие для вузов, изд. 2-е, перераб. и доп. – М.: Энергия, 1987.
6.Сборник задач по теории автоматического регулирования. Под ред. В.А. Бесекерского, изд. 5-е, перераб. – М.: Наука, 1978.
28
|
АФЧХ системы |
ПРИЛОЖЕНИЕ А |
|
I( ω ) |
|
ω |
R( ω ) |
|
1,00 |
-153.832 |
-189.891 |
2,00 |
-86.366 |
-30.481 |
3,00 |
-43.065 |
2.536 |
4,00 |
-21.636 |
7.656 |
5,00 |
-11.452 |
6.903 |
6,00 |
-6.439 |
5.341 |
7,00 |
-3.832 |
4 |
8,00 |
-2.396 |
3 |
9,00 |
-1.564 |
2.277 |
10,00 |
-1.058 |
1.755 |
11,00 |
-0.739 |
1.374 |
12,00 |
-0.529 |
1.093 |
13,00 |
-0.388 |
0.881 |
14,00 |
-0.291 |
0.719 |
15,00 |
-0.221 |
0.594 |
16,00 |
-0.171 |
0.496 |
17,00 |
-0.134 |
0.418 |
18,00 |
-0.107 |
0.355 |
19,00 |
-0.085 |
0.304 |
20,00 |
-0.069 |
0.263 |
21,00 |
-0.057 |
0.228 |
22,00 |
-0.047 |
0.199 |
23,00 |
-0.039 |
0.175 |
24,00 |
-0.032 |
0.155 |
25,00 |
-0.027 |
0.137 |
26,00 |
-0.023 |
0.122 |
27,00 |
-0.02 |
0.11 |
28,00 |
-0.017 |
0.099 |
29,00 |
-0.014 |
0.089 |
30,00 |
-0.012 |
0.08 |
31,00 |
-0.011 |
0.073 |
32,00 |
-9.179e-3 |
0.066 |
33,00 |
-7.972e-3 |
0.061 |
34,00 |
-6.941e-3 |
0.056 |
35,00 |
-6.059e-3 |
0.051 |
36,00 |
-5.299e-3 |
0.047 |
37,00 |
-4.644e-3 |
0.043 |
38,00 |
-4.077e-3 |
0.04 |
39,00 |
-3.584e-3 |
0.037 |
40,00 |
-3.155e-3 |
0.034 |
41,00 |
-2.78e-3 |
0.032 |
42,00 |
-2.451e-3 |
0.03 |
43,00 |
-2.163e-3 |
0.028 |
44,00 |
-1.909e-3 |
0.026 |
45,00 |
-1.685e-3 |
0.024 |
46,00 |
-1.487e-3 |
0.023 |
47,00 |
-1.312e-3 |
0.021 |
48,00 |
-1.156e-3 |
0.02 |
49,00 |
-1.018e-3 |
0.019 |
50,00 |
-8.953e-4 |
0.018 |
29