

курсовая работа / sintez_sledyashey_sistemy_avtomaticheskogo_regulirovaniya_ob
.pdf5. Далее вычисляем значение требуемого момента вращения
|
|
|
MН |
|
|
|
JН |
|
|
|
M |
|
:= |
|
|
+ |
|
|
+ J i |
ε |
|
|
iр.опт |
|
|
|
||||||
|
тр |
|
η |
|
iр.опт |
д р.опт |
|
max |
||
Mтр = 20.53 |
Н м |
|
|
|
|
|
||||
Учитывая, что у двигателей номинальный момент примерно в 2 раза меньше пускового, выбранный двигатель считается пригодным по требуемому моменту, если выполняется условие
Mтр ≤ 2
Mном
Т. к. |
Mтр |
|
= 1.974 |
, |
|
Mном |
|||||
|
|
|
|||
двигатель удовлетворяет требованиям по мощности.
Дополнительно проверяем, удовлетворяется ли следующее условие: приведенный к валу двигателя момент статической нагрузки должен быть меньше или равен номинальному моменту, то есть
M1Н := |
|
MН |
|
|
M1Н = 6.395 Н м |
i |
р.опт |
η |
|||
|
|
|
|
|
|
Т. к. |
M1Н < Mном |
, можно сделать вывод, что двигатель |
|||
МИ-42 удовлетворяет условиям обеспечения требуемых скорости и ускорения
1.3 Определение параметров передаточной функции двигателя
14

1. Используя технические данные двигателя МИ-42, определяем коэффициент противо-ЭДС
Ce := |
Uном − Iя Rя |
Ce = 1.357 |
В с |
||
ωном |
|
рад |
|||
|
|
||||
2. Токовую постоянную или коэффициент момента определяем из следующего выражения
CM := |
Mном |
CM = 1.143 |
Н м |
|
Iя |
А |
|||
|
|
3. Определяем полный момент инерции механизма, приведенный к валу двигателя
JН |
|
JΣ := Jд + iр.опт2 |
JΣ = 0.089 кг м2 |
4. Рассчитываем пусковой момент двигателя. Для этого сначала определим управляющее напряжение в цепи якоря в момент пуска
Uy := Iя Rя + Ce |
Uy = 8.182 В |
||
Тогда пусковой момент |
|
||
|
CM |
|
|
Mпуск := |
|
Uy |
Mпуск = 12.468 Н м |
R |
|||
|
я |
|
|
5. Находим электромеханическую постоянную двигателя
Tд := |
π |
nном JΣ |
|
Tд = 6.776 с |
|
30 (M |
пуск |
− M |
) |
||
|
|
|
ном |
|
|
6. Вычисляем коэффициент передачи двигателя по скорости
15

Kд := |
π nном Mпуск |
|
Kд = 4.305 |
|||
30 (M |
пуск |
− M |
) U |
|
||
|
|
ном |
|
ном |
||
7. В результате проведенных расчетов получаем передаточную функцию двигателя по угловой скорости
W (s) := |
Kд |
W (s) := |
4.305 |
||
|
|
|
|
||
c |
Tд s + 1 |
c |
6.776 |
s + 1 |
|
|
|
||||
8. Передаточная функция по углу поворота запишется в виде
Wу(s) := |
Kд |
|
Wу(s) := |
4.305 |
|
||
s (Tд s |
+ 1) |
s (6.776 |
s |
+ 1) |
|||
|
|
||||||
9. Определим коэффициент передачи главного редуктора
Kр := |
1 |
|
Kр = 2.398 × 10− 3 |
i |
|||
|
р.опт |
|
|
K1р := Kр iрт |
K1р = 0.053 |
||
1.4 Выбор и рачет параметров ЭМУ |
|
||
Рассчитаем параметры ЭМУ с номинальной мощностью 1600 Вт
1. Определяем постоянную времени по продольной оси ЭМУ Td, пренебрегая постоянной времени компенсационной обмотки ввиду ее относительной малости.
По характеристикам для Рном = 1600 Вт и n = 3000 об/мин находим удельную индуктивность
Lупр |
= 0.07 10− 4 |
Гн |
, |
|
W |
2 |
виток2 |
||
|
упр |
|
|
|
откуда
16
L |
|
:= 0.07 10− 4 W |
2 |
|
|
L |
упр |
= 19.289Гн |
|||
|
упр |
|
|
|
упр |
|
|
|
|
||
|
Постоянная времени обмотки управления: |
||||||||||
T |
упр |
:= |
Lупр |
|
|
T |
упр |
= 0.016 с |
|||
rупр |
|
||||||||||
|
|
|
|
|
|
|
|
||||
Поскольку постоянная времени компенсационной обмотки приблизительно равна нулю, тогда постоянная времени по продольной оси ЭМУ
Td := Tупр |
Td = 0.016 с |
2. Постоянную времени поперечной цепи находим по характеристике для Рном = 1600 Вт и n = 3000 об/мин
Tq := 0.07 с
3. Находим коэффициент усиления ЭМУ, пользуясь универсальной кривой холостого хода. Для этого определим параметр
K := |
140 − 60 |
K = 6.154 |
|
|
|||
d |
24 |
− 11 |
d |
|
|
||
Коэффициент усиления по напряжению для обмотки управления
K |
:= K |
Wупр |
K = 8.513 |
|
|||
q |
d rупр |
q |
|
Полученное значение соответствует режиму холостого хода.
4. Определяем коэффициент усиления по напряжению при работе ЭМУ на нагрузку. Для этого найдем коэффициент жесткой внутренней обратной связи K0 и фиктивную индуктивность Lфк. По кривым для Рном = 1600
Вт и n = 3000 об/мин
K0 := 1 |
Lфк := 2 Гн |
Тогда коэффициент усиления при работе на нагрузку
17
K := |
Kd + Kq |
K = 7.333 |
|
|
|||
U |
1 |
+ K0 |
U |
|
|
||
5. Определяем фиктивное сопротивление. Для этого сначала определим U0 (напряжение на выходе ЭМУ при і=0), U1 (напряжение на выходе
ЭМУ при і= Iном)
Напряжения определяем по кривым:
U0 |
:= 255 |
В |
U1 |
:= 187 |
В |
i1 |
:= Iном |
|
Тогда фиктивное сопротивление
U0 − U1 |
|
(1 |
+ K0) |
|
|||
rфк := |
|
|
− r |
rфк = 7.477 Ом |
|||
i1 |
|||||||
|
|
|
|
|
|||
6. Для систем с непосредственным включением ЭМУ на Д необходимо учитывать следующее. Понижение напряжения на выходе ЭМУ ∆Uэкв
эквивалентно падению напряжения на искомом эквивалентном сопротивлении Rэкв= ∆Uэкв/ Iном. Недокомпенсацию принимаем ∆Uэкв
= βUном.
Примем
β := 0.3 |
|
|
|||||
При этом |
|
|
|||||
Rэкв |
:= |
β Uном |
Rэкв = 6.055 |
Ом |
|||
Iном |
|
||||||
|
|
|
|||||
Тогда |
|
|
|
|
|||
T := |
|
JΣ (Rя + Rэкв) |
T = 0.391 |
с |
|||
|
|
|
|
||||
|
|
|
|
||||
M |
|
|
Ce CM |
M |
|
||
|
|
|
|
|
|||
18

и |
|
|
|
Wдв(s) := |
26.193 |
||
s (0.391 |
s + 1) |
||
|
|||
rном := Rя + Rэкв |
rном = 6.805 Ом |
||
7. В итоге получены все данные для расчетов передаточной функции ЭМУ
KЭМУ := |
|
|
rном KU |
|
KЭМУ = 4.937 |
||||||||||||||
rном |
|
+ r + |
|
rфк |
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
rном + r |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Td + Tq + |
|
rфк |
|
|
|
|
|
|||||||||||
a1 := |
|
rном |
+ r |
|
a1 = 0.317 |
с |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
1 + K |
+ |
|
|
|
rфк |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
rном + r |
|
|
|
|
||||||||||||
0 |
|
|
|
|
|
|
|
|
|||||||||||
a2 := |
|
Td |
Tq |
|
|
|
|
|
|
|
|
a2 |
= 4.013 |
× 10− 4 с |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 + K |
+ |
|
|
|
|
rфк |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
rном + r |
|
|
|
|
||||||||||||
0 |
|
|
|
|
|
|
|
||||||||||||
Передаточная фунция по данным расчетов принимает вид
4.937
WЭМУ(s) := 4.013 × 10− 4 s2 + 0.317 s + 1
1.5Выбор коэффициента усиления усилительного устройства
1.Входное напряжение, действующее на входе усилителя, определяется выражением
U |
вх.у |
:= K |
ИРго |
δ |
ИРдоп |
|
iрт |
Uвх.у = 0.832 В |
|
60 57.3 |
|||||||||
|
|
|
|
19

2. Находим добротность следящей системы, исходя из скоростной составляющей ошибки
KΩ := |
ωmax 57.3 |
KΩ = 28.65 с |
− 1 |
|
δск.доп |
||||
|
|
3. Коэффициент усиления усилителя определяется по формуле
Kу := |
|
KΩ |
|
Kу = 5.622 |
K |
K K K |
|
||
|
ИРго |
д р |
ЭМУ |
|
Поскольку пассивные корректирующие устройства снижают уровень сигнала, то возьмем увеличенное значение Ку, т.к.
Kу := |
Uном |
Kу = 53.57 |
||
U |
K |
ЭМУ |
||
|
вх.у |
|
|
|
Примем
Kу := 54
4. Определим уточненное значение общего коэффициента передачи:
KΩ := KИРго Kу KЭМУ Kд Kр |
KΩ = 275.198 |
Запишем передаточную функцию разомкнутой следящей системы по углу поворота, которая равна произведению передаточных функций т элементов устройств, входящих в состав проектирумой следящей системы
W(s) := |
KΩ |
||
s (TM s + 1) (a2 s2 + a1 s + 1) |
|
||
W(s) := |
275.198 |
|
|
|
|
||
.157e-3 s4 + .125 s3 + .709 s2 + 1.00 s |
|||
|
|||
20
2. Расчет следящей системы на устойчивость и выбор корректирующего устройства
2.1 Определение устойчивости следящей системы по критерию Найквиста
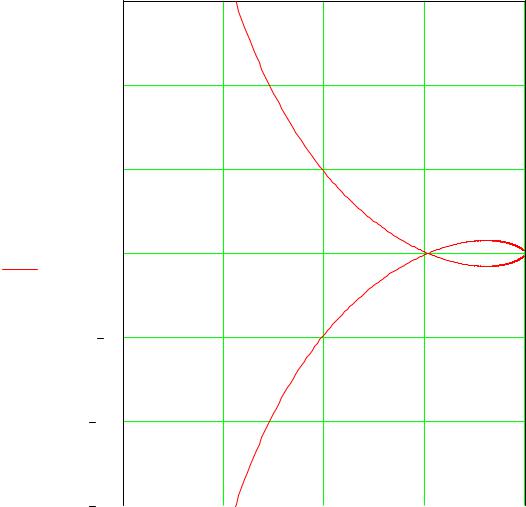
Для определения устойчивости системы построим годограф АФЧХ (см прил. А):
150
100
50
Im(W(iω)) 0
50
100
150 |
|
|
|
|
|
|
|
|
|
||
200 |
|
150 |
|
100 |
|
50 |
0 |
||||
|
|
|
|
|
|
||||||
Re(W(iω))
Как видно из рисунка, годограф охватывает точку (-1, j0). Следовательно, система неустойчива и для обеспечения устойчивости и заданных динамический свойств необходимо использовать корректирующие звенья.
21

2.2 Типы корректирующих устройств Дляпридания следящей системе требуемых динамических характеристик
используются корректирующие устройства. Изменения характеристик следящей системы достигается различными способами, поэтому задача корректирующих устройствне является однозначной. Один и тот же результат может быть получен различными техническими средствами. Различают три способа включения корректирующих устройств в систему: последовательное, параллельное и в цепь местной обратной связи.
1.Наиболее просто определяется корректирующее устройство последовательного типа. Для этого сначала необходимо построить ЛАХ разомкнутой системы.
Определим сопрягающие частоты асимптотической ЛАХ:
ω1 := 2.58 |
ω2 := 3.12 |
ω3 := 790 |
Начальный наклон -20дБ/дек. В точке ω1 ЛАХ имеет значение
20lgK=51.355 дБ
ЛАХ приведена на рисунке 2
2. Строим желаемую ЛАХ.
Для этого найдем частоту среза
Для этого воспользуемся номограммой Солодовникова. Для заданного перерегулирования и времени переходного процесса определим
ωC := |
2.2 π |
ωC = 4.608 c− 1 |
tп |
Запас по амплитуде Lм выбираем по номограмме для заданного перерегулирования
Lм := 25 дБ
Желаемая ЛАХ приведена на рис. 2 (пунктирная линия).
22

|
|
|
150 |
|
|
|
|
|
|
|
|
|
||
|
|
|
100 |
|
|
|
|
|
|
|
|
|
||
|
L(ω) |
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дБ |
Lp(ω) |
|
|
|
0 |
|
|
|
|
|
ωc |
ωd |
|
|
Lp(ω)−L(ω) |
|
|
|
ωa |
|
ωb |
|
|
|
|
|
|||
|
|
|
|
50 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
100 |
|
|
|
|
|
|
|
|
|
||
|
|
|
150. |
3 |
0.01 |
0.1 |
1 |
10 |
100 |
. |
|
3 |
||
|
|
|
|
1 10 |
|
1 10 |
|
|||||||
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
рад/с |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
рад |
φ(ω) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
3 |
|
0.01 |
0.1 |
1 |
10 |
100 |
. |
3 |
|
|
|
1 10 |
|
|
1 10 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рад/с |
|
|
|
|
|
|
|
|
|
|
|
Рис. 2 Логарифмические характеристики |
|
|
|
|
||||
23