

4.2. . Исследование сау с дискретизацией регулятора методом прямоугольников.
Для нахождения передаточной функции дискретизации непрерывного регулятора. цифрового корректирующего устройства, воспользуемся преобразованием прямоугольников смысл которого заключается в следующем.

Приравняем передаточную функцию к отношению сигналов на входе и на выходе:
![]() ,
,
где
![]() - сигнал на выходе;
- сигнал на выходе;
![]() -
сигнал на входе.
-
сигнал на входе.
Выведем рекуррентную формулу для цифрового звена.
![]()
![]()
![]()
![]()
![]()
Где
![]() кванты времени
кванты времени![]()
Получаем формулу в которой для расчета выходного сигнала достаточно знать текущее значение сигнала на входе, предыдущее значение входного сигнала и предыдущее значение выходного сигнала. Расчеты по данной формуле реализуем с помощью языка программирования Turbo Pascal
Сравним результаты моделирующей программы с результатами моделирования в пакете MatLab-Simulink.
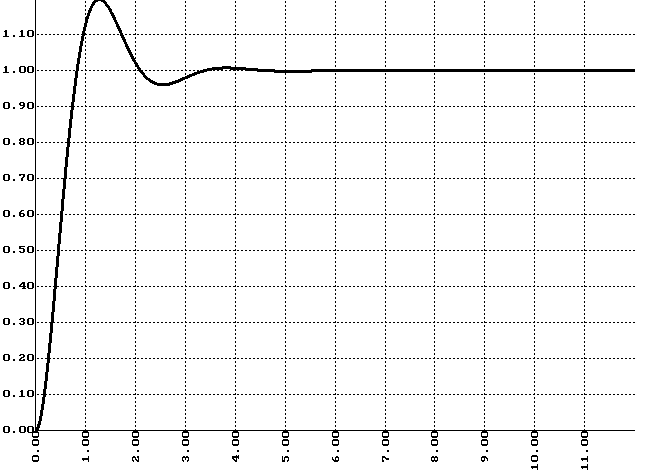
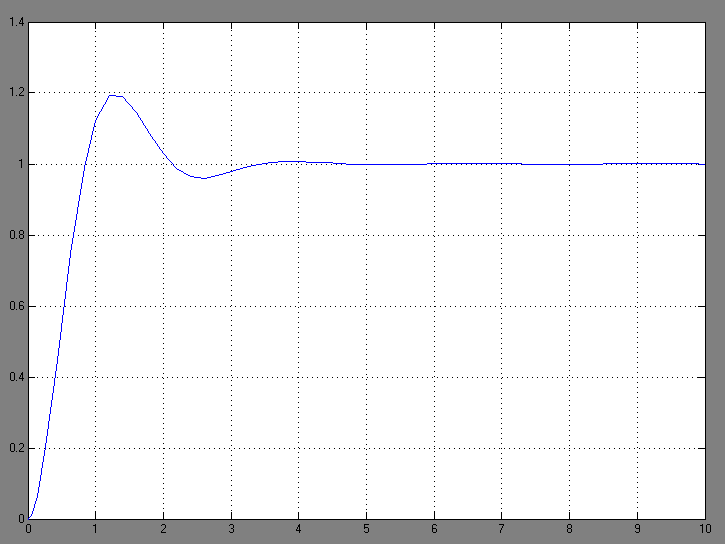
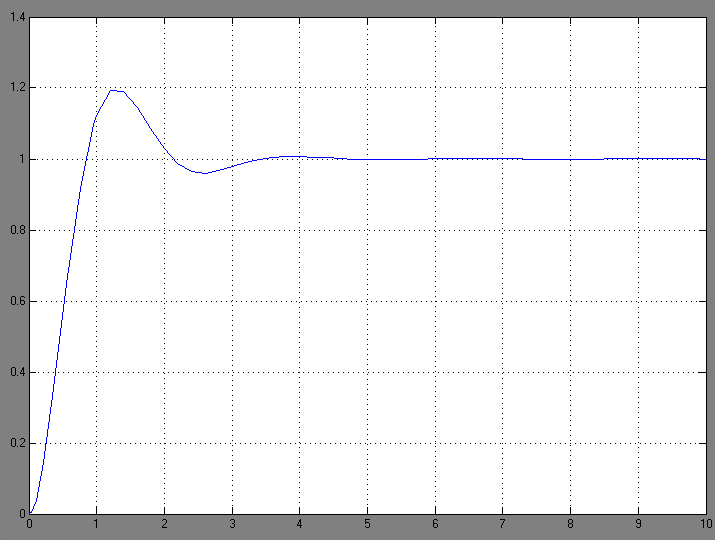
Аналоговая система с цифровым корректирующим устройством, полученным преобразованием прямоугольников и результаты её моделирования в пакете MatLab(Simulink.),TurboPascal.
TurboPascalT0=0,001с (преобразование прямоугольников
Simulink
4.3. Аналоговая сау с цифровым корректирующим устройством, полученным стандартнымz-преобразованием.
Найдем передаточную функцию цифрового корректирующего устройства, воспользовавшись стандартным z-преобразованием для дискретизации непрерывного регулятора.
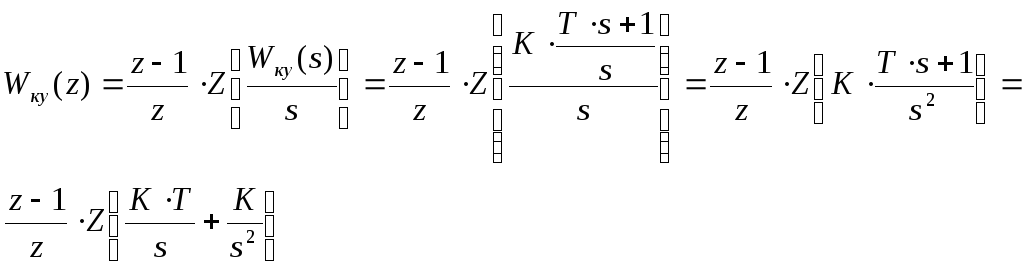 Воспользуемся
свойством линейности Z-преобразования:
Воспользуемся
свойством линейности Z-преобразования:
![]()
![]()
Воспользуемся таблицей z-преобразований:
![]()
![]()
![]()
![]()
![]()
![]()

Приравняем передаточную функцию к отношению сигналов на входе и на выходе:
![]() ,
,
где
![]() - сигнал на выходе;
- сигнал на выходе;
![]() -
сигнал на входе.
-
сигнал на входе.
Выведем рекуррентную формулу для цифрового звена.
![]()
![]()
![]()
![]()
![]()
Где
![]() ,
,
![]()
Следовательно для вычисления значения выходного сигнала для данного звена достаточно знать текущее значение сигнала на входе, предыдущее значение входного сигнала и предыдущее значение выходного сигнала.
Сравним результаты моделирующей программы с результатами моделирования в пакете MatLab-Simulink.
Аналоговая система с цифровым КУ, полученным стандартным z-преобразованием и результаты её моделирования в пакетеMatLab-Simulink.
Стандартным преобразованием Turbo Pascal
T0=0,0008с (стандартное z-преобразование)
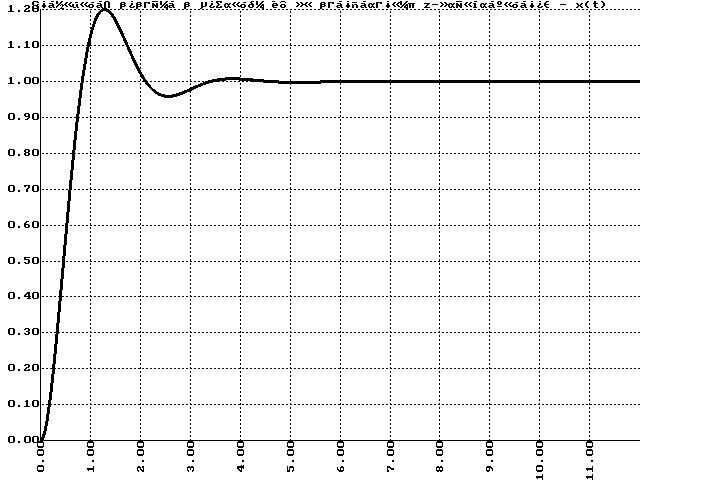
Simulink
5Выводы. Вывод: в результате нахождения максимального периода дискретизации получили следующие результаты:
Для цифрового корректирующего устройства, полученного при помощи преобразования Тастина, максимальный период дискретизации T0 равен 0,0008 с.
Для цифрового корректирующего устройства, полученного при помощи преобразования прямоугольников, максимальный период дискретизации T0 равен 0,001 с.
Для цифрового корректирующего устройства, полученного с помощью стандартного z-преобразования, максимальный период дискретизации T0 равен 0,008 с.
Из полученных результатов работы можно сделать общий вывод
Наибольший период дискретизации, при сохранении заданных требований к переходному процессу в данной САУ наблюдался у корректирующего устройства, полученного с помощью преобразования прямоугольников. Поэтому корректирующее устройство, полученное с помощью преобразований прямоугольников является наиболее приемлемым для данной САУ, так как требует менее частой корректировки состояния объекта управления при соблюдения заданных требований к переходному процессу.