

Определимдетерминант полученной матрицы с помощью пакета matcad:
![]() (1.13)
(1.13)
Приравниваем коэффициенты при одинаковых степенях в уравнениях (1.11) и (1.13):
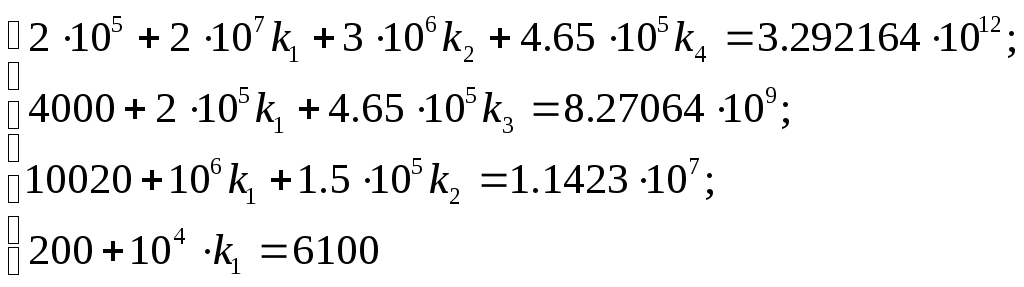 (1.14)
(1.14)
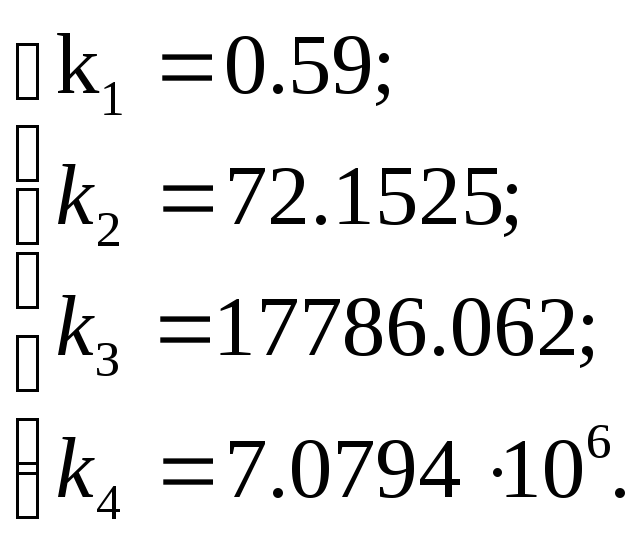
Решая систему уравнений (1.14), получим:
Подставим полученные коэффициенты управления в модель САР (рис.9), промоделируем в пакете CLASSIC ,но так как в программе происходит округление коэффициентов в блоках обратной связи, то получить требуемые показатели качества переходного процесса не удается. Поэтому скорректируем значения расчетных коэффициентов управления:

и получим следующие корни характеристического уравнения:
p1 = -2069.78; p2 = -360.568+526.7796j; p3 = -360.568 -526.7796j;p4 = -3909.086.
Показатели качества переходного процесса:
время переходного процесса tp= 0.009 с и перерегулирование σ = 10.81 %.
Корневая плоскость и переходный процесс модулируемой САР представлены на
рисунках 10 и 11 соответственно.
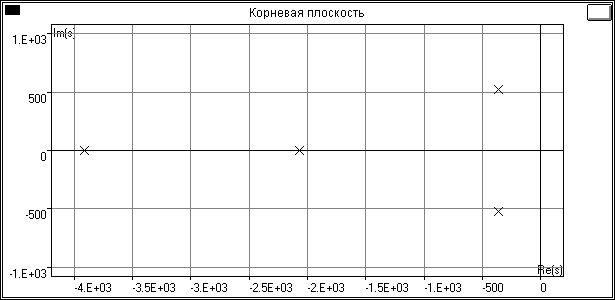
Рис.10 Корневая плоскость моделированной САР.
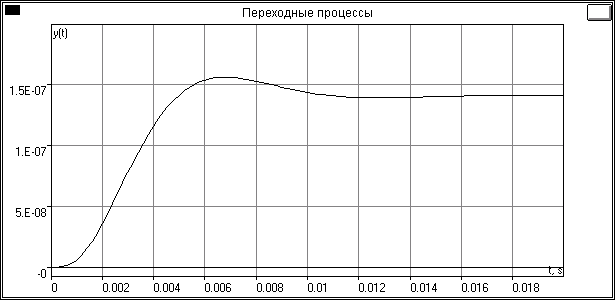
Рис.11 Переходный процесс системы с расчетными коэффициентами
управления (tп =0.009с.;σ=10.81%)
1.4 Проверка системы на грубость при изменении коэффициентов на 10%
Увеличивая коэффициенты k1,k2,k3,k4 на 10%, получаем:
Корневая плоскость и переходный процесс в системе при увеличении
коэффициентов на 10% показаны на рисунках 12 и 13 соответственно.
После моделирования имеем следующие полюсы:
p1 = -1876.73; p2 = -358.669+526.954j; p3 = -358.669 -526.954j;s4 = -4755.879.
Время регулирования tp= 0.009 с не изменилось; перерегулирование
σ = 10.85 % увеличилось на 0.04%.
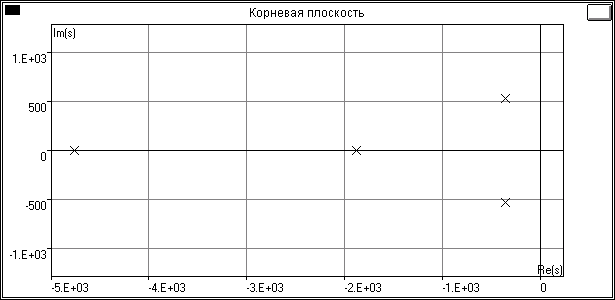
Рис.12 Корневая плоскость при увеличении на 10% расчетных коэффициентов.
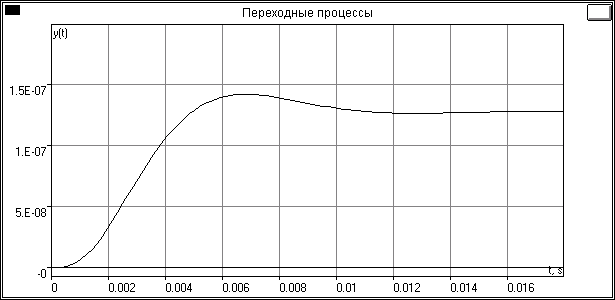
Рис.13 Переходный процесс при увеличении на 10% расчетных
коэффициентов (tп=0.009с.;σ=10.85%).
При уменьшении коэффициентов управления на 10 %:
После моделирования имеем следующие полюсы:
p1 = -362.842+526.523j;
p2 = -362.842+526.523j;
p3 = -2662.158 -412.656j;
p4 = -2662.158 – 412.656j.
Время регулирования tp= 0.009 с не изменилось;
перерегулирование σ = 10.77 % уменьшилось на 0.04%.
Корневая плоскость и переходный процесс в системе при уменьшении
коэффициентов на 10% показаны на рисунках 14 и 15 соответственно.

Рис.14 Корневая плоскость при уменьшении на 10% расчетных коэффициентов
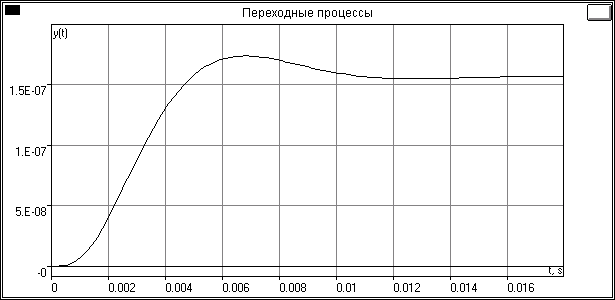
Рис.15 Переходный процесс при уменьшении на 10% расчетных коэффициентов
(tп=0.009с., σ= 10.77%)
Таким образом, синтезированный регулятор системы обеспечивает заданное качество переходных процессов системы и практически не меняется при изменении коэффициентов в пределах 10%.
ЗАКЛЮЧЕНИЕ
В ходе выполнения курсовой работы были приобретены практические навыки по анализу и синтезу заданной системы управления – системы магнитного подвеса. При выполнении работы были решены следующие задачи: линеаризация модели относительно точки установившегося режима, получение структурной схемы и передаточной функции объекта, получение математической модели системы в форме уравнений состояния. Исходя из требований к системе, были рассчитаны желаемые параметры, при введении в систему обратных связей по переменным состояниям был получен переходный процесс, удовлетворяющий заданному качеству. Точностные и динамические свойства синтезированной системы были исследованы при помощи моделирования в программном пакете Classic.