

1 Синтез линейной системы
1.1 Получение линеаризованной модели
Объект описывается нелинейным уравнением
![]() (1.1)
(1.1)
Пусть заданному режиму соответствуют
m=![]() ;h=
;h=![]() ;
;![]() =
=![]() ;
;![]() =
=![]() .
(1.2)
.
(1.2)
Обозначим отклонения
реальных значений m,
h,
![]() ,
,![]() от требуемых через Δm,
Δh,
Δ
от требуемых через Δm,
Δh,
Δ![]() и Δ
и Δ![]() ,
то есть Δm=m-
,
то есть Δm=m-![]() ,
Δh=h-
,
Δh=h-![]() ,
Δ
,
Δ![]() =
=![]() -
-![]() ,
Δ
,
Δ![]() =
=![]() -
-![]() .
Тогдаm=
.
Тогдаm=![]() +
Δm;
h=
+
Δm;
h=![]() +
Δh;
+
Δh;
![]() =
=![]() +
Δ
+
Δ![]() ;
;![]() =
=![]() +Δ
+Δ![]() .
Подставим эти выражения в (1.1) и,
рассматриваяF
как функцию от независимых переменных
m,
.
Подставим эти выражения в (1.1) и,
рассматриваяF
как функцию от независимых переменных
m,
![]() ,h,
,h,
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
разложим ее в ряд Тейлора в точке (1.2) и
отбросим малые члены более высокого
порядка, чем отклонения. Тогда (1.1) примет
вид
,
разложим ее в ряд Тейлора в точке (1.2) и
отбросим малые члены более высокого
порядка, чем отклонения. Тогда (1.1) примет
вид
![]() +
+![]() ∙Δh+
∙Δh+![]() ∙Δ
∙Δ![]() +
+![]() ∙Δ
∙Δ![]() +
+![]() ∙Δm=0.
(1.3)
∙Δm=0.
(1.3)
Здесь звездочка
сверху обозначает, что соответствующие
функции и производные вычисляются при
значениях аргумента, определяемых
соотношениями (1.2). Когда в системе
устанавливается заданный режим, уравнение
(1.1) принимает вид
![]() =0.
Вычтя это уравнение из (1.3), получим
искомое уравнение звена в отклонениях:
=0.
Вычтя это уравнение из (1.3), получим
искомое уравнение звена в отклонениях:
![]() *Δh+
*Δh+![]() *Δ
*Δ![]() +
+![]() *Δ
*Δ![]() +
+![]() *Δm=0,
(1.4)
*Δm=0,
(1.4)
где
![]() =
=![]() ;
;
![]() =
=![]() ;
;
![]() =
=![]() ;
;
![]() =
=![]() =
0.15
=
0.15
- значения частных производных в точке линеаризации:
![]() =0,02;
=0,02;![]() =0,05;
=0,05;![]() =
0;
=
0;
Поделив обе части
уравнения (1.4) на
![]() и оставив в левой части только Δ
и оставив в левой части только Δ![]() ,
получим:
,
получим:
Δ![]() =
-20 Δh
-196 Δm+3.1
Δ
=
-20 Δh
-196 Δm+3.1
Δ![]() .
(1.5)
.
(1.5)
1.2 Запись модели в форме структурной схемы, передаточной функции и уравнений состояния
Построим структурную схему системы (рис. 3): (здесь и далее все отклонения от величин обозначаются как сами эти величины)


![]()
![]()




![]()







![]()


![]()

![]()



![]()
![]()



U UЭМ iэм![]()
![]()
![]()
![]()
![]()
![]()
Рис. 3 Структурная схема исходной системы
Передаточная функция по управлению имеет вид
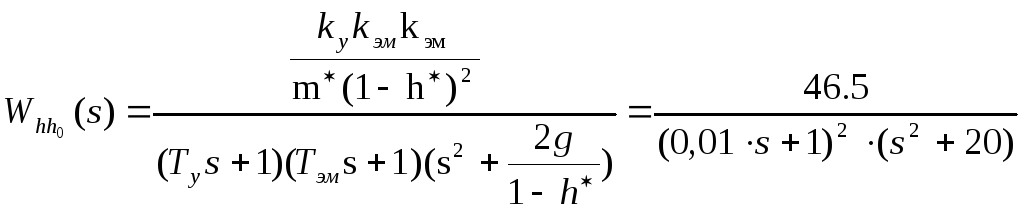 .
(1.6)
.
(1.6)
Передаточная функция по возмущению (массе m):
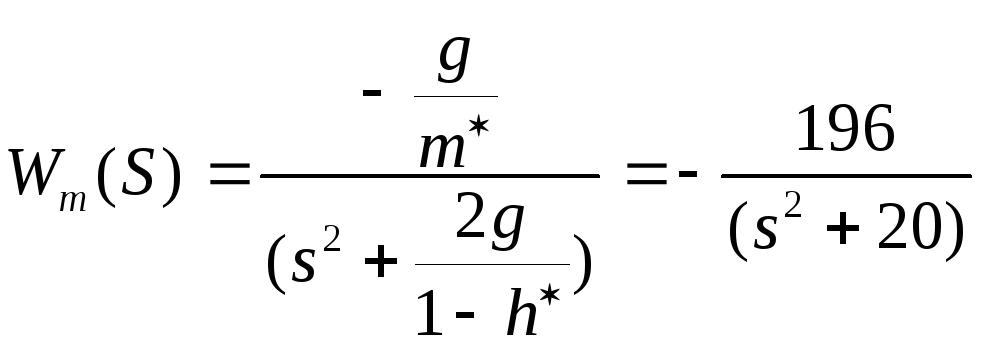 .
(1.7)
.
(1.7)
Для получения модели в форме уравнений состояния введем переменные состояния, приняв за них выходы интеграторов (рис. 4).

![]()
![]()






![]()
![]()
![]()
u![]()

![]()
![]()
![]()
![]()
![]()
![]()

![]()



![]()




![]()

![]()











![]()

![]()
![]()

![]()

![]()


![]()
![]()





Рис.4 Структурная схема для составления уравнений состояния
Используя структурную схему (рис.4), запишем уравнения состояния:
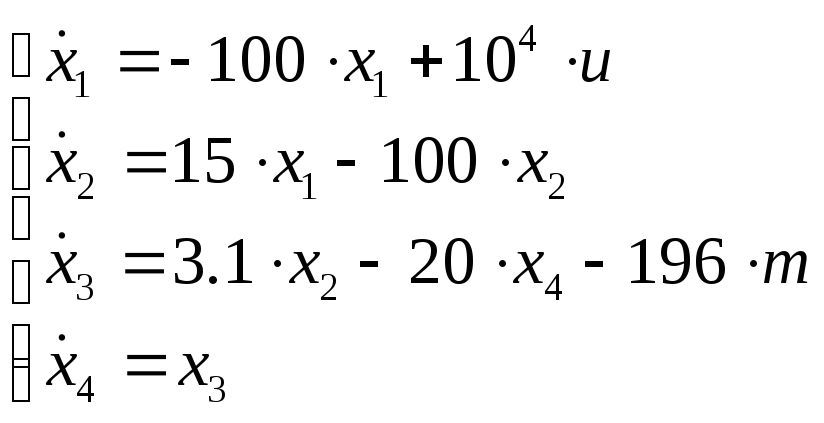 (1.8)
(1.8)
Систему уравнений (1.8) запишем в матричном виде:
![]() ,
(1.9)
,
(1.9)
где
![]()

1.3 Синтез системы стабилизации положения ферромагнитного тела
Смоделируем полученную линейную систему при помощи пакета Classic. Корневая плоскость и переходный процесс в системе изображены на рисунках 5 и 6 соответственно.
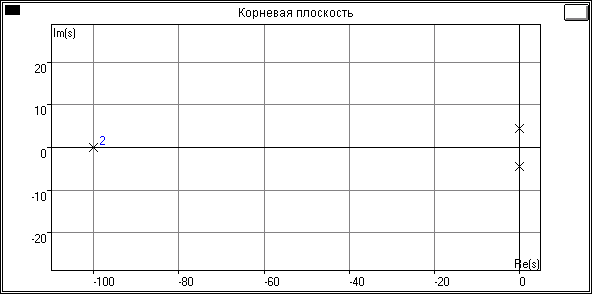
Рис.5 Корневая плоскость исходной модели
Корни характеристического уравнения исходной системы:
p1,2 = -100; p3 =4.472j; p4 = -4.472j.
Рис.6 Переходный процесс в исходной системе
Корни p3 и p4 находятся на мнимой оси, т.е. система находится на границе устойчивости (процесс колебательный).
Для обеспечения заданного качества переходного процесса в системе используем процедуру модального синтеза. В данной системе необходимо перенести полюсы в левую полуплоскость, учитывая требования к качеству переходного процесса.
Время переходного процесса tп и перерегулирование σ,% связаны со степенью устойчивости η и колебательностью μ следующими соотношениями[1]:
 ,
(1.10)
,
(1.10)
где
![]() ,
,
α и β – вещественная и мнимая части корня, при котором их отношения
максимальны.
Поскольку система колебательная, то ближайшие корни к мнимой оси должны быть комплексно - сопряженные. Из соотношения (1.10) ближайший корень (вещественная часть) α должен иметь величину < -(300 -500), а β → ± (420 -700).
С помощью пакета Classic выбираем желаемое расположение корней, моделируя исходную передаточную функцию и меняя параметры системы, подбираем корни, которые отвечают указанным требованиям:
p1,2 = -2700; p3 = -350+480j; p4 = -350 -480j.
Характеристическое уравнение желаемой передаточной функции имеет вид:
![]() .
(1.11)
.
(1.11)
Время переходного процесса tp= 0.0096 с и перерегулирование σ = 9.53 %, что удовлетворяет заданным условиям. Комплексная плоскость и переходный процесс желаемой системы представлены на рисунках 7 и 8 соответственно.

Рис.7 Корневая плоскость желаемой передаточной функции
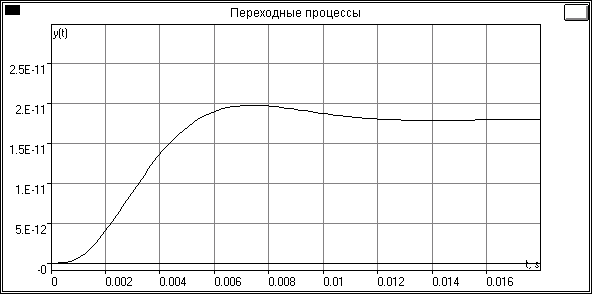
Рис.8 Переходный процесс в желаемой системы (tп=0.0096с.;σ=9.53%)
Для того чтобы сдвинуть полюса нашей системы в точки p1 – p4 , необходимо на вход системы завести обратные связи от всех четырех состояний системы как показано на рисунке 9.
Определим матрицу коэффициентов (К) из следующего матричного уравнения:
![]() (1.12)
(1.12)
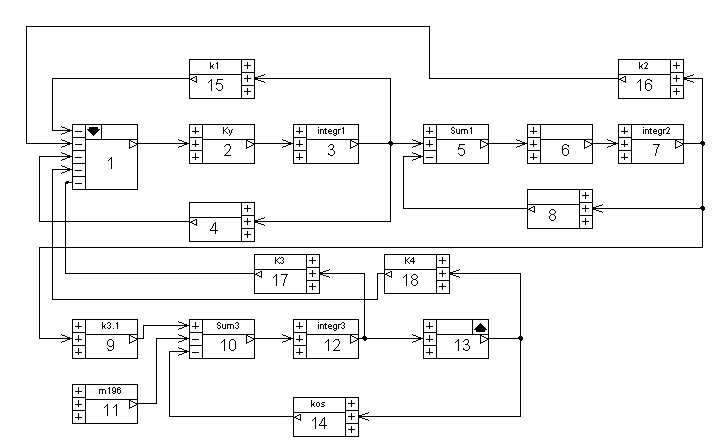
Рис.9 Модель замкнутой САР.
где
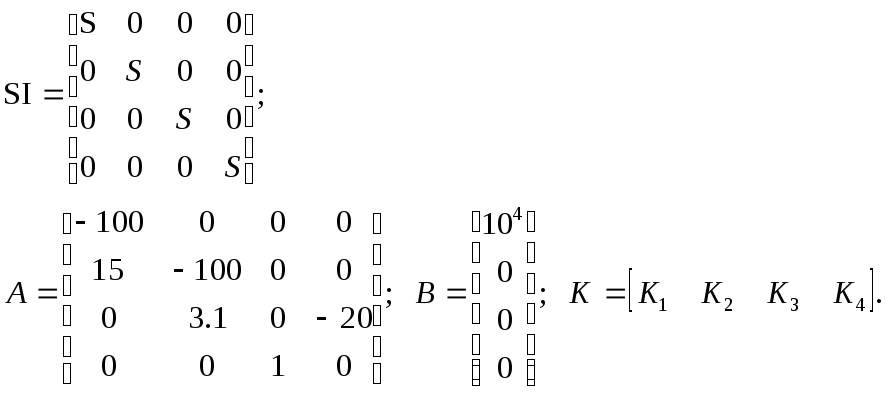
Тогда
