

2. Построение лачх неизменяемой части системы.
Неизменяемая часть системы регулирования содержит объект управления, исполнительный элемент, основной элемент цепи обратной связи и элемент сравнения.
Асимптотическую ЛАЧХ неизменяемой части строят путём суммирования ординат ЛАЧХ звеньев разомкнутой неизменяемой части системы [2,стр. 43; 3,стр. 64; 4,стр. 65].
С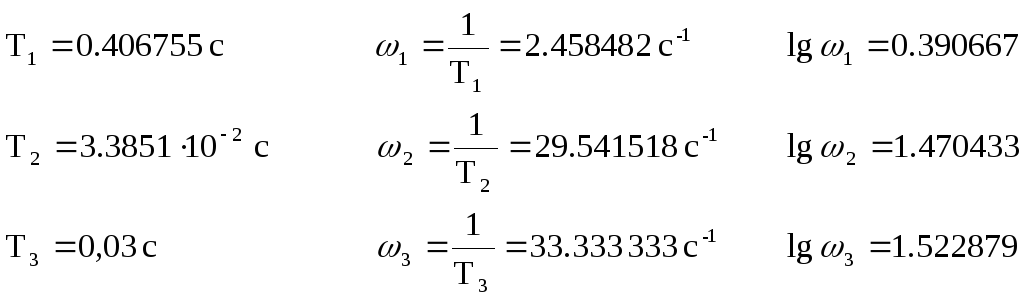
![]() огласно
передаточной функции разомкнутой САУ
(см. формулу (5)), определяем параметры
необходимые для построения ЛАЧХ
неизменяемой части:
огласно
передаточной функции разомкнутой САУ
(см. формулу (5)), определяем параметры
необходимые для построения ЛАЧХ
неизменяемой части:
П![]() остроение
ЛАЧХ неизменяемой части приведено на
рисунке 8 (см. приложение).
остроение
ЛАЧХ неизменяемой части приведено на
рисунке 8 (см. приложение).
3. Построение желаемой лачх.
Желаемая ЛАЧХ строится на основе требований, предъявляемых к проектируемой системе управления и определяется показателями качества и точности процесса управления.
П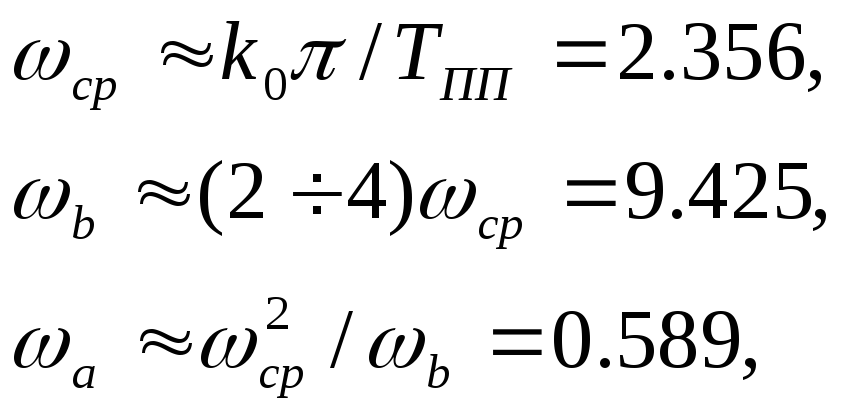
 ри
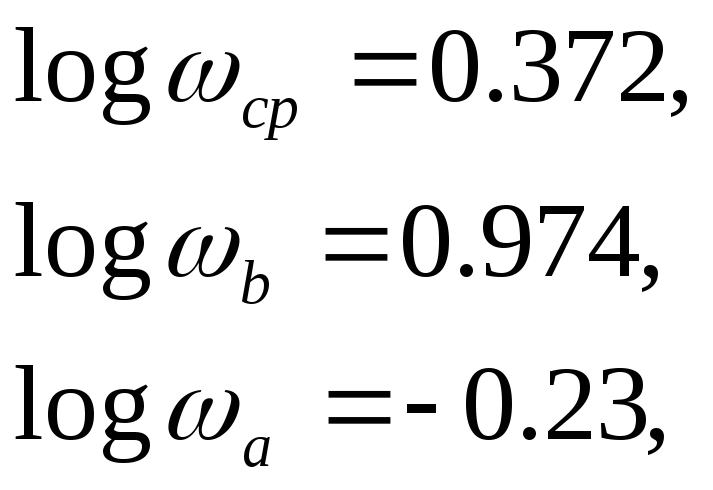
построении желаемой ЛАЧХ принимаем
наклон среднечастотной асимптоты
(заключённой в пределахн<<ср)
–20 дБ/дек, а частоту среза и частоты,
ограничивающие среднечастотную асимптотуаиb,
определим по формулам [2,стр. 414]:
ри
построении желаемой ЛАЧХ принимаем
наклон среднечастотной асимптоты
(заключённой в пределахн<<ср)
–20 дБ/дек, а частоту среза и частоты,
ограничивающие среднечастотную асимптотуаиb,
определим по формулам [2,стр. 414]:
здесь k0 = 1.5 выбирается по графику, приведённому на рисунке 5 [7, стр.12]. Ордината низкочастотной (диапазон 0<<н) и наклон высокочастотной (диапазонс<<) асимптот определяются соответственно коэффициентом усиления и наклоном высокочастотной асимптоты исходной, разомкнутой САУ.
Построение желаемой ЛАЧХ приведено на рисунке 8 (см. приложение).
4. Определение передаточной функции корректирующего устройства.
ЛАЧХ корректирующего устройства получают путём вычитания из значений ординат желаемой ЛАЧХ значений ординат ЛАЧХ неизменяемой части САУ. По полученной ЛАЧХ корректирующего устройства определяют передаточную функцию регулятора.
И![]() з
рисунка 8 (см. приложение) видно, что ЛАЧХ
регулятора имеет две частоты сопряжения1=2.458482
и4=0.128825,
соответствующие им постоянные времениT1=0.406755 иT4=7.762471.
Учитывая наклон ассимптоты заключенной
на промежутке4<<1,
определяется передаточная функция
корректирующего устройства согласно
рисунку 8 (см.приложение):
з
рисунка 8 (см. приложение) видно, что ЛАЧХ
регулятора имеет две частоты сопряжения1=2.458482
и4=0.128825,
соответствующие им постоянные времениT1=0.406755 иT4=7.762471.
Учитывая наклон ассимптоты заключенной
на промежутке4<<1,
определяется передаточная функция
корректирующего устройства согласно
рисунку 8 (см.приложение):
5. Техническая реализация корректирующего устройства.
Согласно передаточной функции регулятора осуществляется техническая реализация корректирующего устройства и рассчитываются значения его параметров [2, табл. 8.2].
П ринципиальная
электрическая схема регулятора
выполненного на пассивных элементах
приведена на рисунке 9.
ринципиальная
электрическая схема регулятора
выполненного на пассивных элементах
приведена на рисунке 9.
Рисунок 9. Принципиальная электрическая схема регулятора (синтез методом ЛЧХ).
П![]() ередаточая
функция выбранного регулятора в общем
виде:
ередаточая
функция выбранного регулятора в общем
виде:
Определяются параметры корректирующего устройства.
С![]() огласно
передаточной функции регулятора (6)
имеем:T1=0.406755,T2=7.762471. Причем
соотношение между постоянными времени
и пассивными элементами в цепи регулятора
таково:
огласно
передаточной функции регулятора (6)
имеем:T1=0.406755,T2=7.762471. Причем
соотношение между постоянными времени
и пассивными элементами в цепи регулятора
таково:
Задаваясь
![]() и решая совместно уравнения (7) и (8)
определяются:
и решая совместно уравнения (7) и (8)
определяются:
![]()
6. Обобщенная алгоритмическая структура скорретированной сау.
Обобщенная алгоритмическая структура скорретированной САУ приведена на
р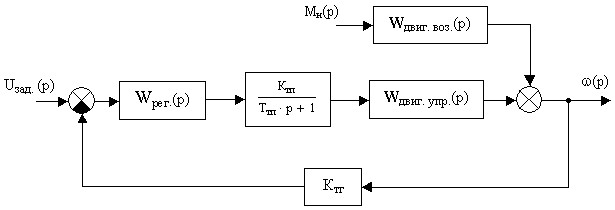 исунке
9.
исунке
9.
Рисунок 9. Обобщенная алгоритмическая структура скорректированной САУ.
П ередаточная
функция скорректированной САУ по
управляющему воздействию (Uзад.(p))
исходя из обобщенной алгоритмической
структуры (см. рисунок 9) имеет вид:
ередаточная
функция скорректированной САУ по
управляющему воздействию (Uзад.(p))
исходя из обобщенной алгоритмической
структуры (см. рисунок 9) имеет вид:
В![]() местоWдвиг.упр.(p)
иWрег.(p)
подставляются соответствующие
передаточные функции двигателя и
регулятора (см. формулы – (1), (6)), после
преобразований получается:
местоWдвиг.упр.(p)
иWрег.(p)
подставляются соответствующие
передаточные функции двигателя и
регулятора (см. формулы – (1), (6)), после
преобразований получается: