

Значения исходных параметров для курсовой работы.
|
№ |
Двигатель постоянного тока |
Тиристорный преобразователь |
Тахогенера-тор |
| |||||||
|
Pном КВт |
Uном В |
nном об/мин |
% |
Rя Ом |
Lя мГн |
J кг.м2 |
Kтп |
Tтп с-1 |
Kтг с-1 |
Tпп c | |
|
19 |
18 |
220 |
3150 |
87 |
0.06 |
1.5 |
3.32 |
30 |
0.02 |
2.0 |
1.5 |
Pном –номинальная мощность двигателя постоянного тока;
Uном –номинальное напряжение двигателя;
nном –номинальная скорость вращения;
-КПД двигателя;
Rя –сопротивление якорной цепи двигателя;
Lя –индуктивность якорной цепи двигателя;
J –момент инерции приведенный к валу двигателя;
Kтп –коэффициент усиления тиристорного преобразователя;
Tтп –постоянная времени тиристорного преобразователя;
Kтг –коэффициент усиления тахогенератора;
Tпп –заданное время переходного процесса;
=20% -заданная величина перерегулирования;
 =1
–заданная колебательность переходного
процесса.
=1
–заданная колебательность переходного
процесса.
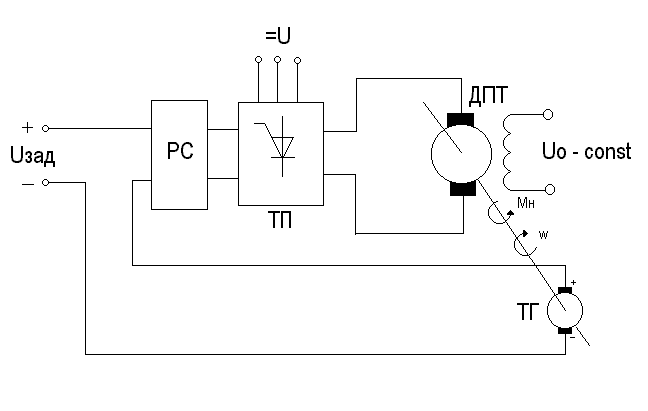
Рисунок 1. Принципиальная схема системы управления частотой вращения двигателя постоянного тока (ДПТ – двигатель постоянного тока, ТП – тиристорный преобразователь, ТГ – тахогенератор, РС – регулятор скорости).
§1. Функциональная структура исследуемой сау.
П о
принципиальной схеме системы управления
частотой вращения двигателя постоянного
тока (рисунок 1) составляется функциональная
структура САУ (см. рисунок 2).
о
принципиальной схеме системы управления
частотой вращения двигателя постоянного
тока (рисунок 1) составляется функциональная
структура САУ (см. рисунок 2).
Рисунок 2. Функциональная структура САУ.
§2. Алгоритмические структуры и передаточные функции основных динамических звеньев сау.

Рисунок 3. Алгоритмическая структура электродвигателя постоянного тока.
Расчетные параметры для двигателя постоянного тока находятся по следующим формулам:
э![]() лектромагнитная
постоянная времени якорной цепи:
лектромагнитная
постоянная времени якорной цепи:
э лектромеханическая
постоянная времени:
лектромеханическая
постоянная времени:
к![]() онструктивная
постоянная двигателя:
онструктивная
постоянная двигателя:
н![]() оминальный
ток двигателя:
оминальный
ток двигателя:
н![]() оминальная
частота вращения:
оминальная
частота вращения:
А лгоритмические
структуры тиристорного преобразователя
и тахогенератора приводятся на рисунке
4 и рисунке 5.
лгоритмические
структуры тиристорного преобразователя
и тахогенератора приводятся на рисунке
4 и рисунке 5.
Р![]() исунок
4. Алгоритмическая структура тиристорного
преобразователя.
исунок
4. Алгоритмическая структура тиристорного
преобразователя.
Рисунок 5. Алгоритмическая структура тахогенератора.
Для упрощения дальнейших расчётов находятся передаточные функции двигателя по управляющему и возмущающему воздействиям.
П о
управляющему воздействию:
о
управляющему воздействию:
п о
возмущающему воздействию:
о
возмущающему воздействию:
§3. Обобщенная алгоритмическая структура сау. Передаточные функции.
Составляется обобщенная алгоритмическая структура САУ (рисунок 4), используя полученные передаточные функции двигателя (см. формулы – (1), (2)).

Рисунок 4. Обобщенная алгоритмическая структура САУ.
По обобщенной алгоритмической структуре САУ определяются частные передаточные функции системы по управляющему Uзад(p) и возмущающему Мн(p) воздействиям.
Передаточная функция САУ по управляющему воздействию:

П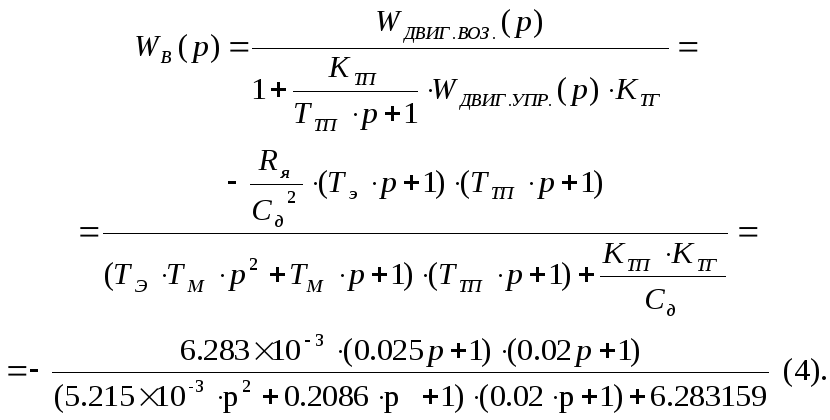 ередаточная
функция САУ по возмущающему воздействию:
ередаточная
функция САУ по возмущающему воздействию:
П ередаточная
функция разомкнутой САУ:
ередаточная
функция разомкнутой САУ:
где Wдвиг. упр.(p) и Wдвиг. воз.(p) – соответствующие передаточные функции двигателя по управляющему и возмущающему воздействиям (см. формулы (1),(2)).