

3.1. Эволюция преобразователей в системах электропривода
Рассматривая современные электромеханические системы, следует иметь в виду не только электродвигатель, но и совокупность преобразователь - двигатель. Свойства системы в значительной мере определяются характеристиками преобразователя. В настоящее время в любой позиционной, а тем более следящей системе используются индивидуальные преобразователи, управляющие работой двигателя. Отличающиеся простотой исполнения релейные системы, которые до середины 20-го столетия иногда находили применение, в настоящее время практически не используются. Они обладают рядом недостатков, обусловленных свойствами релейного элемента, а именно: зоной нечувствительности, гистерезисной характеристикой. Единственное их достоинство - быстрая отработка рассогласования. Другие варианты систем без преобразователей практически не существуют.
Первой электромеханической системой с индивидуальным преобразователем являлась система генератор -двигатель, в которой наряду с исполнительным двигателем постоянного тока использовался машинный агрегат, состоящий из двигателя переменного тока (асинхронного или синхронного) и генератора постоянного тока, от которого непосредственно питается рабочий двигатель, стыкуемый с осью механизма (рис. 3.1). В автономных установках, удаленных от электрических сетей, вместо электродвигателя преобразовательный агрегат может вращаться двигателем внутреннего сгорания или дизелем.
Система генератор - двигатель (ГД) обладает достаточно высокими техническими характеристиками, особенно при использовании жесткой обратной связи, которая всегда присутствует в позиционных и следящих системах. Система ГД имеет достаточно жесткие механические характеристики, широкий диапазон регулирования скорости, обеспечивает тормозной режим с рекуперацией энергии.

Рис. 3.1. Система ГД
Uy - напряжение управления
Основным недостатком системы ГД является ее существенная инерционность, обусловленная большой постоянной времени обмотки возбуждения генератора. Для частичного преодоления ее приходится использовать средства форсирования нарастания тока в цепи возбуждения. К недостаткам системы также следует отнести наличие трех машин примерно равной мощности, вместо одной, а также необходимой для их размещения соответствующей площади, сложность технического обслуживания и т. д. Необходимо отметить, что, несмотря на отмеченные недостатки, система ГД до 50-х годов использовалась весьма широко во всех отраслях промышленности. Других вариантов преобразователей в это время не было. Электронные лампы, существовавшие тогда, не могли использоваться в силовых преобразователях.
Первые преобразователи без вращающихся машин могли быть построены в 40-50-х годах на базе ионных аппаратов: управляемых ртутных выпрямителей, тиратронов, игнитронов и др. Однако практическое использование подобных преобразователей ограничилось только небольшим числом опытных установок, что было обусловлено неудобством эксплуатации ионных приборов. Они требуют сохранения высокого вакуума, для чего используется стеклянная колба либо вакуум поддерживается непрерывной работой соответствующих насосов, причем обычно в двухступенчатом варианте.
Более перспективными, казалось бы, должны быть магнитные усилители и действительно их использование совместно с двух- фазными асинхронными двигателями позволяет иметь достаточно быстродействующие позиционные и следящие системы для мощностей до 150 Вт (рис. 3.2). Создать на базе магнитных усилителей систему с двигателем постоянного тока практически оказалось невозможным. Коэффициент полезного действия устройства с магнитным усилителем не может быть выше 20%, что обусловлено неизбежными уравнительными токами, возникающими вследствие невозможности как полного закрытия цепей, так и обеспечения проводимости, стремящейся к бесконечности. Только при использовании мостовой схемы Скотта с четырьмя магнитными усилителями становится возможным приблизить величину КПД к 50%.

Рис. 3.2. Система магнитный усилитель - двухфазный двигатель
Тр - трансформатор; ДД - двухфазный двигатель; ОВд и ОУд - его обмотки: возбуждения и управления; МУ - магнитный усилитель; ОР - рабочие обмотки МУ; ОУу - обмотки управления МУ; ОСу - обмотки смещения; С - конденсаторы
Недостатки преобразователей с ионными, магнитными и другими приборами заставили техническую мысль вновь вернуться к электромашинным преобразователям. Были созданы в ряде вариантов электромашинные усилители (ЭМУ), среди которых широкое применение получили только электромашинные усилители с поперечным полем. Этот ЭМУ представляет собой двухкаскадный электромашинный усилитель, выполненный на базе машины постоянного тока, в которой полезно используется поток реакции якоря по поперечной оси и практически устранено влияние потока реакции якоря по продольной оси за счет использования компенсационной обмотки с настраи: вающимся контуром (рис. 3.3).
Следящие системы с ЭМУ в 50-60-е годы нашли широкое применение как в промышленности, так и в боевой технике. В этих системах с ЭМУ были использованы средства форсирования процессов, токоограничение и т. п. Мощность установок была ограничена 10 кВт.
В результате широкого фронта работ в области силовой полупроводниковой техники в 60-е годы были созданы тиристоры, с использованием которых были построены преобразователи как для систем постоянного, так и переменного тока.
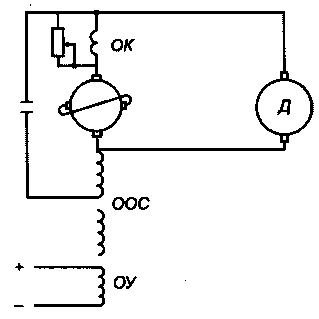
Рис. 3.3. Система ЭМУ - двигатель
ОК- обмотка компенсационная; ОУ- обмотка управления; ООС- обмотки обратных связей
Тиристор представляет собой не полностью управляемый прибор, включение которого осуществляется подачей соответствующего импульса на управляющий электрод, а отключение может быть осуществлено только за счет снятия напряжения в силовой цепи. В связи с этим преобразователь на тиристорах обычно работает как преобразователь с импульсно-фазовым управлением и имеет достаточно сложную систему управления.
На базе тиристоров были построены системы как с двигателями постоянного тока, так и с асинхронными. Системы постоянного тока с тиристорными преобразователями имеют характеристики, аналогичные характеристикам системы генератор -двигатель: жесткие механические характеристики, широкий диапазон регулирования скорости, торможение в режиме рекуперации и т. п. В реверсивных системах, к которым всегда принадлежат позиционные и следящие системы, приходится использовать два преобразователя (рис. 3.4), включенных по крестообразной схеме. Второй преобразователь необходим также и для создания тормозного режима.
Для упрощения на рис. 3.4 приведена схема преобразователя с нулевой точкой, которая обладает некоторыми отрицательными свойствами, рассмотренными ниже. В основном находят применение преобразователи с мостовыми схемами включения полупроводниковых аппаратов.
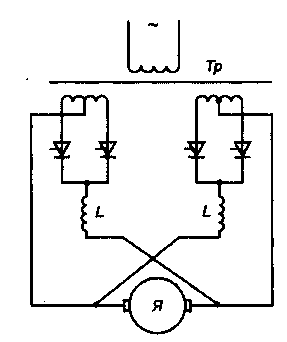
Рис. 3.4. Реверсивная схема тиристорного привода (в однофазном исполнении)
L - сглаживающие реакторы
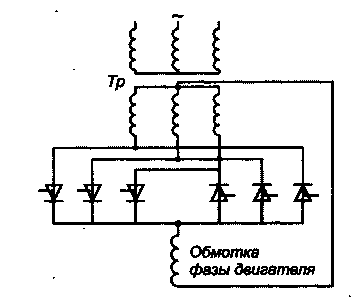
Рис. 3.5. Схема одной фазы преобразователя НПЧ
Появление тиристоров позволило также создать и системы переменного тока с частотным управлением асинхронными двигателями. При этом нашли применение два варианта систем: со звеном постоянного тока и с непосредственной связью (НПЧ). В системе со звеном постоянного тока сетевое напряжение выпрямляется и после фильтра используется в автономном инверторе напряжения, от которого непосредственно питается асинхронный двигатель. Для создания реверсивной схемы и обеспечения тормозного режима, как и на постоянном токе, требуются два преобразователя (АИН).
В системе с непосредственным преобразователем частоты кривая напряжения низкой частоты как бы нарезается из отрезков синусоидальной кривой напряжения частоты сети. При этом даже для одной фазы требуется шесть приборов (рис. 3,5). В трехфазной установке соответственно должны быть использованы 18 приборов (тиристоров). Основной недостаток системы с НПЧ - невозможность использования ее при частоте, близкой к сетевой. Практически система может работать при частотах 0-20 Гц.
К началу 90-х годов ряд электротехнических фирм освоил изготовление транзисторов на токи до 20-50 А при напряжении до 500 В. Это позволило создать преобразователи для установленной мощности до 20 кВт. С этого момента началось постепенное прекращение функционирования всех других ранее использовавшихся типов преобразователей. На постоянном токе в основном стали использоваться широтно-импульсные преобразователи (ШИП), работающие на частоте несколько килогерц. При этом существенно снизились помехи и потери, обусловленные пульсациями выпрямленного тока. В выпрямительных схемах даже при мостовой трехфазной схеме частота первой гармоники составляет 300 Гц, что на порядок меньше, чем частота, используемая в транзисторных ШИП (3-5 кГц).
Широтно-импульсные преобразователи первоначально стали использоваться в локальных установках, питаемых от сети, напряжение в которой поддерживается постоянным. Это была единственная возможность создания регулируемых электромеханических систем для подобных условий работы. Обладая существенными преимуществами по сравнению с управляемыми выпрямителями, они быстро стали вытеснять последние и в промышленности. Также и в системах частотного управления двигателями переменного тока преимущественно стали использоваться автономные инверторы напряжения (АИН) с широтноимпульсной модуляцией. В настоящее время широко используются АИН с синусоидальной формой напряжения, применение которых уменьшает потери в двигателе.
Революционные изменения в преобразователях как для систем постоянного тока, так и переменного происходят в настоящее время в связи с появлением мощных силовых транзисторов: полевых и типа IGBT, при этом преобразователи существенно упрощаются. В связи с большими номинальными токами и напряжениями силовых транзисторов отпадает необходимость в использовании различных сборок из нескольких транзисторов и соответственно специальных схем для согласования работы относительно маломощных транзисторов.
Существенно облегчается выбор силовых транзисторов для конкретной установки за счет экспериментальных характеристик, которые фирма-изготовитель прикладывает к прибору и которые позволяют весьма просто определить ожидаемые тепловые режимы. Расширяется возможность контроля работы установки за счет непосредственного измерения теплового состояния приборов. Открываются широкие перспективы для использования микропроцессоров и компьютеров для контроля режимов работы силовых транзисторов, оптимизации их работы, диагностики, прогнозирования и т. п.
В связи с организацией производства силовых транзисторов некоторое применение стали находить приводы постоянного тока с линейными усилителями, однако в ограниченных объемах, так как КПД установок с усилителями недостаточно высок.
3.2. ПРЕОБРАЗОВАТЕЛИ В СИСТЕМАХ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
3.2.1. СИСТЕМЫ УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ - ДВИГАТЕЛЬ
В прецизионных системах электропривода постоянного тока в настоящее время используется два типа преобразователей: управляемый выпрямитель и широтно-импульсный преобразователь (совместно с неуправляемым выпрямителем). Оба типа преобразователей теперь строятся на базе применения транзисторных силовых полупроводниковых элементов: полевых транзисторов и биполярных транзисторов с изолированным затвором (IGBT).
Для управляемых выпрямителей в основном используются мостовые трехфазные схемы (рис. 3.6), которые обеспечивают малые пульсации выходного напряжения [8]. Первая гармоника частотой 300 Гц имеет амплитуду, составляющую 5,7% от уровня выпрямительного напряжения, в то время как при использовании схемы с нулевой точкой она составляет 20%. Существенно также то обстоятельство, что для мостовой схемы напряжение

Рис. 3.6. Управляемый выпрямитель на транзисторах
вторичной обмотки трансформатора в два раза меньше, чем для схемы с нулевой точкой. В связи с этим имеется и отрицательная особенность мостовых схем - необходимость применения удвоенного числа полупроводниковых аппаратов.
Применение схем с нулевой точкой, аналогичных показанной на рис. 3.4, практически исключается, так как работа их связана с наличием постоянной составляющей токов во вторичных обмотках трансформатора. При этом возникающая МДС возбуждает магнитный поток, который вынужден замыкаться через воздушное пространство. Повышение индукции и насыщение магнитопровода приводит к отрицательным результатам - большим потерям, нагреву элементов магнитопровода и др. Использование их может быть допущено только в установках малой мощности.
Недостатком управляемых выпрямителей на транзисторах являются существенные потери в транзисторах, работающих в режиме усилителя. К преимуществам следует отнести более простую схему управления.
Как позиционная, так и следящая системы должны обладать реверсивными свойствами. Естественно, без коммутационных переключений обеспечить изменение полярности напряжения на выходе выпрямителя не представляется возможным, поэтому, как правило, в системах используется два управляемых выпрямителя, включенных по крестообразной или встречно-параллельной схемам. По своим свойствам они равноценны (рис. 3.7).
Непременным условием работы следящей системы является возможность автоматического перевода ее в процессе слежения в тормозной режим. Так как полупроводники обладают униполярной проводимостью, то переход преобразователя в инверторный режим возможен только при использовании отрицательных полуволн напряжения. К такому режиму всегда подготовлен второй преобразователь, предназначенный для обеспечения вращения якоря двигателя в обратном направлении. Торможение всегда происходит в режиме с рекуперацией энергии. Запасенная во вращающихся элементах энергия возвращается обратно в сеть переменного тока. В итоге система всегда может плавно переходить из одного состояния в другое, из двигательного режима в тормозной и обратно, обеспечивать реверс и другие режимы.

Рис. 3.7. Управляемые выпрямители в реверсивных системах электропривода:
a - крестообразная схема; б - встречно-параллельная
Средствами управления, однако, должна быть гарантирована невозможность возникновения сквозного короткого замыкания, причиной которого может быть слишком поздняя команда на включение в работу второго преобразователя для тормозного режима. Если ток не успеет перейти на второй преобразователь и останется в работе ранее действующий полупроводниковый прибор первого преобразователя, то напряжение в контуре этого прибора будет больше и при отсутствии сигнала на его отключение величина тока может достичь недопустимого уровня. Это явление может быть особенно опасным в тиристорном варианте выполнения преобразователя, когда отключение ранее работавшего тиристора может быть осуществлено лишь при разрыве цепи или резком снижении напряжения (за счет предварительного вступления в режим коммутации ранее работавшего и вступающего в действие тиристоров).
При использовании двух преобразователей переход из двигательного режима в тормозной и обратно может обеспечиваться в двух вариантах:
а) при поддержании преобразователей в раздельном режиме, когда в каждый момент участвует в работе только один преобразователь;
б) при их постоянном нахождении в совместном режиме.
В первом случае, когда система работает в двигательном режиме, преобразователь-инвертор подготовлен к работе, но не включен, поэтому никаких уравнительных токов не возникает. Однако при переходе к тормозному режиму необходимо отключение преобразователя - выпрямителя, затем должна быть бестоковая пауза и только после завершения ее ввод в работу инвертора. Для прецизионной следящей системы такая последовательность операций недопустима. Она, во-первых, может привести к колебаниям около положения равновесия и, во-вторых, при этом нельзя обеспечить малую погрешность около нулевой отметки.
Поэтому, как правило, используется совместный режим, хотя при этом неизбежны уравнительные токи между преобразователями, обусловленные неидентичностью их условий работы и неполным соответствием их параметров, в результате чего мгновенные значения напряжений могут быть неравными. Для ограничения токов приходится последовательно включать реакторы (индуктивности), показанные на рис. 3.7.
Механические характеристики системы управляемый выпрямитель - двигатель жесткие, с небольшим уклоном, определяемым падением напряжения в сопротивлениях цепи якоря, которые невелики. В тиристорном варианте выполнения преобразователя дополнительно сказывается падение напряжения, обусловленное последовательным переключением тока с одного полупроводникового прибора на другой. Коммутация происходит не мгновенно, а за некоторый промежуток времени, в течение которого ток в работавшем ранее приборе спадает, а во вступающем в действие нарастает до требуемого уровня, т. е. имеет место так называемое явление перекрытия токов (рис. 3.8). На этом отрезке времени в кривой выпрямленного напряжения

Рис, 3.8. Перекрытие токов двух последовательно включающихся тиристоров
возникает некоторая просадка, и среднее напряжение соответственно уменьшается. Падение напряжения в результате процесса коммутации составляет
![]()
где χтр - индуктивность короткого замыкания трансформатора, приведенная к вторичной обмотке; т - число фаз.
То же явление перекрытия токов существует и в инверторном режиме, но так как поток энергии направлен в обратную сторону, то при этом выпрямленное напряжение и соответственно скорость двигателя повышаются.
Регулирование выпрямленного напряжения в тиристорном преобразователе достигается за счет импульсно-фазового управления, при котором изменяется момент включения полупроводникового прибора. Следует иметь в виду, что при снижении выпрямленного напряжения существенно уменьшается коэффициент мощности и питающая сеть загружается реактивными токами. Для компенсации низкого коэффициента мощности приходилось использовать специальные средства — синхронные компенсаторы, батареи конденсаторов и др. Это являлось существенным недостатком системы тиристорный преобразователь — двигатель.
В некоторых случаях поддержание коэффициента мощности на требуемом уровне удалось обеспечить за счет искусственной коммутации, при использовании которой оказалось возможным сдвиг фаз сделать даже опережающим. Широкого применения в связи со сложностью схемы управления этот путь построения преобразователя не получил.
Еще одним недостатком системы с управляемым выпрямителем на тиристорах являлась нелинейность механических характеристик на начальном участке при малых моментах и токах. Скорость идеального холостого хода в этом случае стремится либо к скорости, соответствующей амплитудному значению напряжения, либо к меньшей скорости, но тоже достаточно высокой, определяемой напряжением в момент открытия тиристора.

Где Ub – выпрямленное напряжение; (Uв0 - то же при угле регулирования α = 0; U2 - действующее напряжение на вторичной обмотке трансформатора; т - число фаз.
Для линеаризации этой зависимости обычно вводят в систему дополнительное звено с арккосинусной характеристикой [17,25,32].