

3. Следящие системы.
Пример выполнения СС.
В современных АСУ широко применяются следящие системы. Следящие системы являются разновидностью систем автоматического управления, и обеспечивает автоматическое слежение за управляющим воздействием, которое изменяется по произвольному, заранее неизвестному закону. Управляющее воздействие может быть пропорционально линейному и угловому положению объекта, скорости или ускорения объекта, частоте или фазе колебаний и тд. Следящие системы предназначены для автоматического управления пространственным положением объектов или состоянием регулируемой величины и широко используются в станках, автоматических линиях, работах и манипуляторах, в навигационных системах, в системах радиоавтоматики и многих других.
В качестве примера, иллюстрирующего устройство и принцип действий простейшей следящей системы, рассмотрим схему следящей системы для управления положением шпинделя сверлильного станка. Основное назначение данной системы – точное согласование положение командной оси, приводимой в движение человеком – оператором, и шпинделя станка (командная ось и шпиндель механически не связаны между собой). Главными функциональными элементами системы являются:
-
измеритель рассогласования, состоящий из двух потенциометров R1 и R2;
-
усилитель мощности (магнитный или тиристорный);
-
электродвигатель привода подачи;
-
понижающий редуктор;
Объектом управления (нагрузкой) является шпиндель станка, перемещающийся в вертикальной плоскости с помощью реечного механизма и вращающегося вокруг своей оси двигателем привода шпинделя. Работа данной следящей системы происходит следующим образом.
Измеритель рассогласования (ИР) предназначен для определения величины и знака рассогласования в системе, т.е. определения угловых положений командной оси и выходной оси системы и преобразования этого углового рассогласования в напряжение постоянного тока. ИР состоит из двух проволочных потенциометров R1 и R2, включённых по мостовой схеме с биполярным питанием U1 и U2. При согласованном положении щёток потенциометров R1 и R2, напряжение рассогласования, равно нулю, и механизм подачи находится в состоянии покоя. Человек-оператор, вращая с помощью рукоятки управления командную ось, задаёт положение щётки потенциометра R1. При этом возникает угол рассогласования между положениями щёток потенциометра R1. При этом возникает угол рассогласования между положениями щёток потенциометров R1 и R2 и, как следствие, появляется напряжение рассогласования U пропорциональное этому углу рассогласования. Напряжение рассогласования поступает на ПУ и усилитель мощности в которых за счёт энергии источника питания и
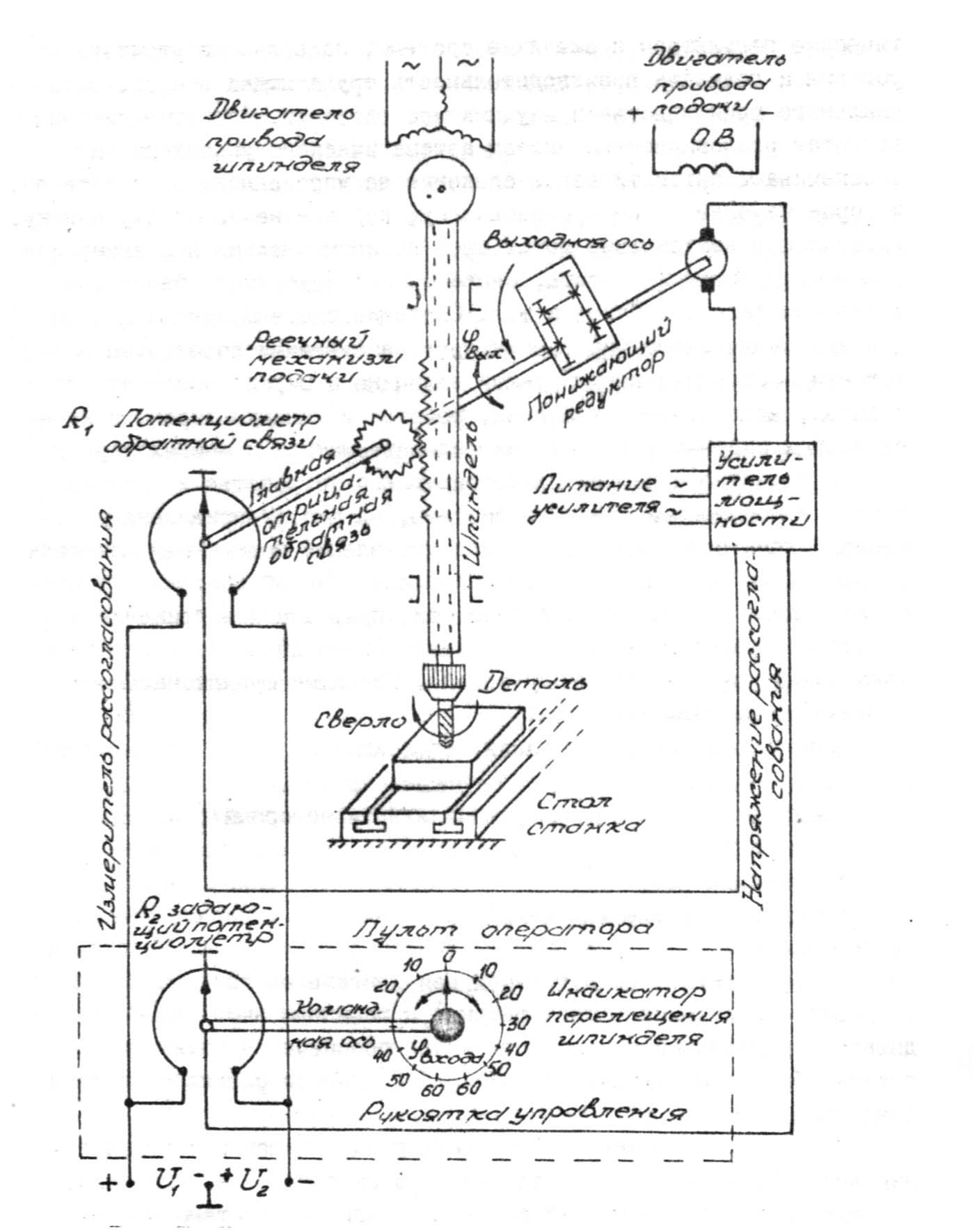
Рис.3.1 Упрощенная схема следящей системы для управления подачей шпинделя
Сверлильного станка
работе активных элементов усилителей происходит усиление этого напряжения рассогласования по напряжению и по току. Выход усилителя мощности подключен к якорю исполнительного электродвигателя привода и подачи шпинделя станка. Следовательно, при появлении напряжения рассогласования якорь двигателя начнёт вращаться и через понижающий редуктор вращать выходную ось следящей системы с которой соединён реечный механизм, позволяющий преобразовать вращательного движение выходной оси в поступательное движение шпинделя станка. С выходной осью системы механически связана щётка потенциометра обратной связана щётка потенциометра обратной связи R2, которая, при движения шпинделя будет перемещаться в направлении уменьшения угла рассогласования. Когда щётка потенциометра обратной связи R2 достигнет согласованного положения со щёткой задающего потенциометра R1 и θ входа = θ выхода напряжение рассогласования V станет равным нулю и якорь двигателя Привод подачи остановится, а шпиндель станка займёт новоё положение, т.е. переместится вверх на величину, пропорциональную углу рассогласования. Для движения шпинделя вниз необходимо вращать рукоятку управления в противоположную сторону. При этом возникнет напряжение рассогласования другой полярности и якорь двигателя будет вращаться в противоположном направлении, перемещая шпиндель вниз. Плавность и скорость подачи шпинделя зависит от плавности и скорости вращения щётки задающего потенциометра R2. Рассмотренную следящую систему можно представить в виде структурной схеме, на которой все основные элементы представлены по их функциональному назначению с соответствующими операторами, показаны их связи, по которым передаётся рабочая информация, и указана физическая природа сигналов, циркулирующих в контуре управления. Измеритель согласования условно показан в виде псевдо звена - элемента сравнения, выявляющего угол рассогласования Δ φ = φ входа – φ выхода и преобразующего этот угол в электрический сигнал. Передача угла поворота выходного вала системы на элемент сравнения происходит за счёт действия главной отрицательной обратной связи (Г.О.О.С.)
В качестве наиболее характерных особенностей рассмотренный следящей системы можно отметить следующее:
1. Наличие замкнутого контура управления (с отрицательной обратной связью), благодаря чему происходит сравнение командного (задающего) воздействия с сигналом, поступающим по каналу Г.О.О.С. с выхода системы.
2. Обязательное наличие сигнала рассогласования, используемого для управления исполнительным двигателем системы (принцип управления по отклонению).
3. Непрямое управление, так как для усиления сигнала рассогласования применяется усилитель мощности, позволяющий существенно облегчить труд человека в процессе обработки детали. Следовательно, следующую систему можно рассматривать как усилитель мощности, точно преобразующий произвольно меняющееся управляющее воздействие в соответствующее ему состояние объекта управления.
4. Возможность дистанционного управления. Задающей потенциометр R 1 может быть удалён от станка на определённое расстояние, определяемое в основном, параметрами трехпроводной линии связи. Использование радиоканала связи позволяет удалять задающий потенциометр на весьма значительные расстояния.
5. Применение вместо задающего потенциометра R 1, электронного устройства, формирующего аналогичное напряжение рассогласования позволяет использовать эту систему в режиме программного управления, широко применяемого в автоматических линиях, работах и манипуляторах.
Основные соотношения в линейных СС.
Рассмотрим работу и свойства следующей системы с пропорциональным управлением, т.е. такой системы, у которой входной сигнал, а следовательно, и восстанавливающий вращающий момент исполнительного двигателя пропорциональны рассогласованию. Упрощенная принципиальная электрическая и структурная схема имеет вид:
θвх UP У Д Р θвых.
|
К1 |
К2
Кэ
ТэТнр2+Тпр+11
Кэ
Р
т δ Uδ Uд ωд к нагрузкез








 ад.
ад.