

1.4. Диодная схема переключения каналов грубого и точного отсчетов
Следует отметить, что представленные на рис. 1.5 и 1.6 схемы демодуляторов приведены в основном для пояснения принципа их работы. Выпускаемые промышленностью блоки имеют несколько отличную структуру и строятся с использованием операционных усилителей или функционируют на программной основе.
Рассмотренные выше измерители рассогласования работают на принципе сравнения амплитудных значений напряжения, характеризующих углы задания и отработки. Возможно также применение фазового принципа. Углы поворота осей посредством фазовращателей могут быть преобразованы в фазовые сдвиги, которые затем сравниваются в дифференциальном устройстве. При этом фазовращатели обычно строятся на основе применения вращающихся трансформаторов.
Фазовый принцип часто используется при построении датчиков рассогласования на цифровой основе. Цифровые датчики рассогласования в связи с широким внедрением цифрового управления следящими системами сейчас имеют первейшее значение. В цифровых датчиках угол поворота оси должен быть преобразован в соответствующий цифровой код [43,44]. Достаточно просто это осуществляется в дисковых цифровых датчиках. Согласно необходимой разрядности датчик, т. е. диск, должен иметь соответствующее число дорожек с нанесенными делениями. Число последних должно быть наибольшим для съема информации о значении младшего разряда и равно двум (0-1) для старшего. Сектор, соответствующий одному делению на дорожке, относящейся к младшему разряду, может быть определен в угловой мере как
δ = 360/2n,
где n — число двоичных разрядов, на которое рассчитан датчик.
Дорожки для съема информации наносятся на цилиндрическую поверхность, либо носителем кодовых шкал является диск. Съем информации может осуществляться контактным путем, если дорожки состоят из проводящих и непроводящих элементов, и посредством магнитных головок, аналогичных используемым в аудиоаппаратуре, если воспользоваться магнитной формой записи. Наибольшее распространение получили оптические датчики со съемом информации оптическим путем; при этом обеспечивается минимальная погрешность. Кодовая шкала в этом случае наносится на прозрачный материал, например стекло. По одну сторону кодового диска размещается осветитель, по другую фотоэлементы, обычно фотодиоды, засвечиваемые через щелевую диафрагму. Съем информации осуществляется одновременно со всех дорожек. Каждому положению оси диска, а следовательно положению управляемого механизма, соответствует определенная комбинация светлых и темных участков дорожек.
Фотоэлектрические кодовые датчики обеспечивают наивысшую разрешающую способность по отношению к цифровым датчикам, построенным на иной основе. Серийно выпускаемые фотодатчики имеют 10-14 разрядов.
Специальные прецизионные датчики могут иметь до 20 раз рядов. Одна дискрета отсчета при этом соответствует указан ному ниже угловому перемещению δ. .
n…… 10 12 14 16 18 20 21
δ…… 21,1' 5'16" 1'19" 20" 4,94" 1,24" 1,04"
Крайне существенно взаимное расположение световых дорожек, относящихся к различным разрядам. Кодовый диск должен быть построен так, чтобы не было неопределенности в считывании на границах прозрачных и темных элементов. Эта неопределенность обусловлена конечной шириной световой диафрагмы и возможным смещением границ элементов дорожек. Как видно из рис. 1.7, а, на котором представлена обычная двоичная кодовая шкала, на некоторых ее участках граница прозрачных и затемненных элементов может проходить через все дорожки. При этом может быть неопределенность считывания даже в старших разрядах.
В связи с изложенным обычно используется специальный код, так называемый код Грея, при котором при изменении числа на одну единицу младшего разряда перемена кода происходит только на одной дорожке (рис. 1.7, б). Диск построен так, что границы элементов старшего разряда проходят посредине светлого или затемненного участка дорожек предыдущего (младшего) разряда.


Рис. 1.7. Кодовые диски: а — в обычном двоичном коде; б — в коде Грея
Естественно, что информацию, полученную в коде Грея, следует преобразовать в обычный двоичный код. В последнем значение любого разряда определяется как сумма по модулю 2 всех значений разрядов в коде Грея отданного (i-го) до старшего (n), т. е.
а
=
![]() k
(mod 2)
k
(mod 2)
где n - число разрядов; а - значение разряда в обычном коде (0 или 1); g - значение разряда в коде Грея.
Другими словами, если сумма всех значений разрядов в коде Грея от i-го до старшего n-го нечетная, то в i-м разряде обычного двоичного кода будет 1, если четное, то 0. Так, если в коде Грея имеем 10110, то в обычном коде получим 11011. Соответствующая схема преобразования кода Грея в обычный двоичный код представлена на рис. 1.8.
Рис. 1.8. Схема преобразования кода Грея в обычный двоичный код

Возможно также использование обычной двоичной шкалы, но с применением более одного (двух) считывающих устройств, т. е. за счет избыточности информации. В частности, используется метод Баркера и основанный на нем Фау-код. Два считывающих устройства располагаются под некоторым углом, что соответствует букве V (фау) немецкого алфавита (рис. 1.7, а). Угол сдвига должен быть таков, чтобы фотоприемники на каждой дорожке оказывались сдвинутыми между собой на половину угла для соответствующего разряда. В младшем разряде имеем один фотоприемник. Съем информации с того или иного комплекта фотоприемников определяется значением кода, считанного в предыдущем разряде. Если в предыдущем разряде имеем 1, то информация снимается с фотоприемника с отстающим сдвигом, если имеем 0, то с фотоприемника с опережающим сдвигом по величине измеряемого угла. Соответствующая схема съема информации показана на рис. 1.9.
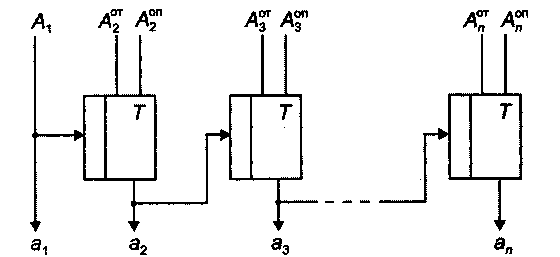
Рис. 1.9. Схема преобразования V-кода в обычный двоичный код
Наряду с кодовыми датчиками в цифровых следящих системах используются также датчики с преобразованием непрерывного, сигнала в цифровой код. В основном это датчики, работающие по схеме "угол - амплитуда - код" и "угол - фаза - код". В аналоговой части измерительного устройства в большинстве случаев применяются уже упоминавшиеся выше вращающиеся трансформаторы.
Рассмотрим вариант "угол - амплитуда - код". На обмотках ротора трансформатора индуцируются ЭДС, пропорциональные синусу и косинусу угла поворота. В пределах небольших углов до 30° характеристики можно считать линейными. Однако имеется существенная зависимость от величины напряжения, подаваемого, на первичную обмотку. Поэтому в системе "угол - амплитуда - код" обычно используется отношение напряжений на обмотках:
![]()
Рис.
1.10. Соотношение напряжений на синусной
и косинусной обмотках СКВТ

Переключение обмоток дня перехода в соответствующую зону осуществляется посредством логической схемы, построенной на триггерах. Схема работает на принципе сопоставления знаков напряжения на синусной и косинусной обмотках. На выходе схемы используется АЦП для преобразования сигнала в цифровую форму.
В датчике по схеме "угол - фаза - код" также находит применение вращающийся трансформатор. Измеряемый угол в этом случае определяется как временной интервал, заполняемый импульсами высокой частоты.
Наименьшую погрешность обеспечивают фотоэлектрические датчики рассогласования [1]. Поэтому они используются не только для слежения за реальными световыми объектами, но и в прецизионных установках неоптического профиля для повышения точности отработки рассогласования. В оптических установках они, естественно, являются единственно возможным типом датчиков рассогласования [1, 22, 23].
Простейший фотоэлектрический датчик для слежения за точечным источником света по одной оси представлен на рис. 1.11. Световой пучёк фокусируется на грань призмы. При отсутствии рассогласования он делится на две равные части и, отражаясь от плоских зеркал, попадает на фотоприемник. Чтобы на поведении системы не сказывалось различие в характеристиках приемников света, используется только один приемник, но на пути световых пучков установлен прерыватель света - модулирующий диск с нечетным числом отверстий. При этом фотоприемник попеременно засвечивается то одним, то другим пучком. При отсутствии рассогласования световой поток, поступающий на фотокатод, практически постоянен. При рассогласовании появится переменная составляющая, фаза которой будет зависеть от знака рассогласования (рис. 1.12). Частота переменной составляющей определяется скоростью вращения диска и числом отверстий в нем. Зона нечувствительности датчика в значительной мере зависит от точности изготовления призмы. Если призму заменить пирамидой, то можно обеспечить слежение по двум координатам.

Рис
1.11 Фотоэлектрический датчик с призмой
Для вращения диска следует использовать синхронный двигатель. В этом случае в качестве опорного напряжения может служить питающее напряжение или одна из его нечетных гармоник (при числе отверстий N > 1).
Существенное упрощение датчика рассогласования может иметь место при использовании четырехквадрантного фотоприемника, у которого фотокатод состоит из четырех изолированных друг от друга секторов. В этом случае отпадает необходимость в каком-либо светоделительном устройстве. Для модуляции светового потока и здесь должен присутствовать диск-прерыватель.
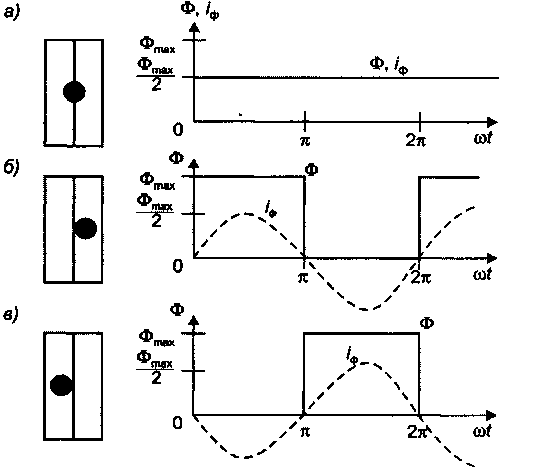
Рис. 1.12. Графики изменения светового потока, поступающего на фотоприемник, и фототока на его выходе

Рис. 1.13. Датчик с полудисковым модулятором
1 - полудиск; 2 - полая ось; 3 - статор; 4 - ротор генератора; 5 - ротор гистерезисного двигателя; б - линза Фабри, удерживающая световое изображение на
фотокатоде; 7 - фотоприемник
Наиболее распространенным является фотодатчик с полудисковым модулятором (рис. 1.13). Непрозрачный полудиск вращается синхронным двигателем в фокальной плоскости оптической системы [23]. При согласованном положении, когда световой поток ориентирован по оптической оси устройства, световое изображение объекта располагается по оси вращения полудиска, который все время затеняет половину светового пятна. Таким образом на фотокатод приемника излучения направляется половина поступающего через объектив светового потока Фmax. При смещении светового пятна с оптической оси появится переменная составляющая светового потока и соответственно фототока, который после усиления используется в системе. Фаза переменной составляющей светового потока определяется направлением ухода изображения с оптической оси; это наглядно представлено на рис. 1.14. Кривая изменения светового потока, поступающего на фотоприемник, определяется изменением площади светового изображения, незатёненной полудиском. При незначительном уходе изображения от осевой отметки (менее 1/4 диаметра изображения) характеристика модулятора, т. е. зависимость фототока от рассогласования, имеет практически Линейный характер. Если изображение смещается на большее расстояние, но не уходит за пределы половины диаметра, возникающий сигнал приобретает почти релейный характер, с небольшой зоной постепенного его нарастания (рис. 1.14) [14].
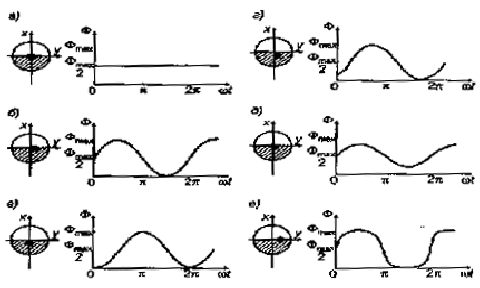
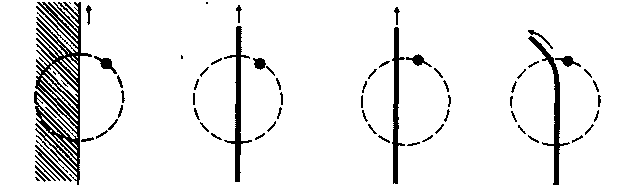
Рис. 1.14. Кривые изменения светового потока на катоде фотоприемника при различных величинах и направлениях ухода светового изображения с оптической оси
Указанные соображения относятся к случаю равномерного освещения светового изображения. При диффракционном изображении имеет место неравномерное распределение световой энергии с максимумом ее в центре изображения. В этом случае характеристика модулятора будет нелинейной с максимальной крутизной при малых рассогласованиях.
Для отображения в кривой тока направления ухода изображения в электрическую цепь после усиления фототока включается демодулятор (фазочувствительный выпрямитель), к которому подводится напряжение от генератора опорных напряжений. Электрические оси опорного генератора согласуются с осями х и у светового поля оптической системы. Для этого статор генератора должен иметь возможность поворота относительно своей оси на угол от - π /2 до + π /2.
Датчики с полудисковым модулятором типа А-610, разработанные Институтом электромеханики, изготавливаются малыми сериями оптической промышленностью России. В них двигатель и генератор опорных напряжений имеют общий статор. Обмотки двигателя и генератора заложены в одни и те же пазы. Двигатель гистерезисный, имеет восемь полюсов, генератор двухполюсный. Соотношение числа полюсов 8:2 исключает влияние токов питания двигателя на напряжение генератора.
Двигатель с целью уменьшения наводок в систему питается напряжением частотой, отличной от 50 Гц. Для создания источника с повышенной частотой используется трансформаторная схема. Вторичные обмотки трех однофазных сильно насыщенных трансформаторов соединены в разомкнутый треугольник, и соответственно на выходе получается частота третьей гармоники, т. е. 150 Гц. Двигатель восьмиполюсный вращается с частотой 2250 об/мин. Кольцо, надетое на ротор, выполнено из магнитотвердого материала. Ротор генератора изготавливается из стали армко и имеет два явно выраженных полюса. Оба ротора, двигателя и генератора, надеты на трубку, которая служит осью комбинированной электрической машины. Внутри нее закреплен непрозрачный полудиск. Для согласования осей генератора с осями телескопа статор машины при настройке может поворачиваться.
Очень часто фотоэлектрические датчики используются в копировальных устройствах металлорежущих станков, газорезательных автоматов и других механизмов. Слежение осуществляется либо по краю контура чертежа, поле которого зачернено, либо по линии чертежа (рис. 1.15). В датчике имеется осветитель, световое пятно, создаваемое которым, вращается вокруг оси датчика. При пересечении световым пятном линии чертежа на выходе фотоприемника возникают импульсы, дважды за оборот осветителя. Если датчик находится на линии чертежа промежутки времени между импульсами одинаковы. При уходе в сторону промежутки становятся разными, что и используется для коррекции движения. Датчик всегда ориентирован по направлению движения. В случае выхода на криволинейный участок чертежа происходит поворот датчика за счет того же изменения соотношений промежутков между импульсами. Вследствие конечного радиуса вращения светового пятна система обладает свойством прогнозирования кривизны пути. Соответственно при проходе углов с целью уменьшения погрешностей возможно автоматическое снижение скорости движения вдоль контура.