3.2Измерители механических величин
В позиционных и следящих системах
Электропривод представляет собой весьма сложную систему, в которой чётко прослеживаются два канала — энергетический и информационный. В недалёком прошлом основу электромеханической системы определял энергетический канал, обеспечивающий преобразование электрической энергии в механическую, используемую в рабочей машине для выполнения того или иного технологического процесса. Основным звеном этого канала является электрический двигатель, питаемый от управляемого преобразователя, обеспечивающего работу двигателя в необходимом статическом и динамическом режимах. Особенности двигателей, используемых в позиционных и следящих системах, рассмотрены во главе 2; там же уделено большое внимание выбору типа двигателя, его скорости и оценке необходимой мощности или момента.
В настоящее время весьма существенное значение имеет и информационный канал. Только за счёт информации, получаемой от датчиков различных физических величин, удаётся построить систему управления электромеханической системой, обеспечивающую наивыгоднейшие условия протекания всех электрических и механических процессов. В прецизионных установках используются системы, в которых вся информация поступает в вычислительное устройство — ЭВМ или микроконтроллёр, которые управляют всеми элементами электромеханического комплекса. Для успешной работы информационного канала электромеханическая система, естественно, должна быть обеспечена надлежащим набором датчиков. В позиционных и следящих системах большинство используемых датчиков те же, что и применяемые в обычных системах электропривода. Поэтому во избежание повторений здесь не будут рассматриваться все датчики, используемые в электромеханических системах. Внимание будет уделено только датчикам, характерным для следящих систем, в первую очередь датчикам рассогласования и датчикам пройденного пути.
3.3 Измерители рассогласования
Позиционных и следящих систем.
Измеритель рассогласования служит входным звеном позиционной и следящей систем. Его задачей является непрерывная оценка разности между входным воздействием и фактическим уровнем величины на выходе. Так как следящие системы в основном представляют собой следящие приводы, то измеритель рассогласования должен определять ошибку на входе
![]() ε=
с1(θ3
— θ0),
(1.1)
ε=
с1(θ3
— θ0),
(1.1)
где θ3 — угол задания; θ0 — угол отработки.
Простейшим устройством для определения разности углов поворота двух осей является механический дифференциал, который первоначально и использовался в следящих приводах. Однако он вносит существенную погрешность за счёт зазоров в зацеплениях шестерён. Кроме того, его применение требует непосредственного сочленения задающей и отрабатывающей осей, что, естественно, затрудняет построение дистанционного управления. При его установке иногда приходилось дополнительно использовать систему передачи угла на сельсинах для дистанционного поворота задающей оси.
В настоящее время углы поворота θ3 и θ0 всегда предварительно преобразуются в соответствующие сигналы, разность которых далее используется в следящем приводе, т. е. имеем
∆U=U3 — U0 = а θ3 — а θ1. (1.2)
При этом обязательно должна быть полная идентичность характеристик U3 = ƒ(θ) и U0 = ƒ(θ), т. е. равенство и неизменность коэффициентов а.
Реостатные датчики были первыми датчиками такого типа (см. рис. 3.1). Они представляют собой прецизионные приборы, к которым предъявляются высокие требования по температурной стабильности, надёжности контактов, линейности характеристик, достигаемой постоянством диаметра намоточного провода и неизменностью шага намотки и т. п. Эти датчики широко использовались в системах наведения артиллерийских орудий.
В настоящее время реостатные датчики используются лишь для управления объектами, длительность жизни которых весьма ограничена; например, они находят применение в управляемых ракетах.
Устройство измерения рассогласования с реостатными датчиками может питаться как постоянным током, так и переменным. В первом случае при изменении знака рассогласования изменяет полярность сигнала на входе; во втором скачком изменяется фаза на угол π.
Преимущественное распространение в типовых следящих системах сейчас имеют индукционные электромашинные датчики — вращающиеся трансформаторы, работающие в трансформаторном режиме, ранее использовались сельсины .
Принципиально применение сельсинов и вращающихся трансформаторов должно дать одинаковые результаты. Однако для вращающихся трансформаторов, как элементов аналоговой вычислительной техники, уже при их разработке было предусмотрено применение высококачественной технологии изготовления. Их погрешность поэтому значительно меньше, чем сельсинов. У вращающихся трансформаторов высших классов погрешность составляет 20 — 30״(ВТМ-4, ВТМ-5). Для сельсинов, в том числе и для бесконтактных, работающих в индикаторном режиме, 30׳. Большая погрешность в индикаторном режиме вполне закономерна, так как часть момента, создаваемого сельсином-приёмником, расходуется на преодоление статического момента трения. При использовании сельсинов в трансформаторном режиме погрешность уменьшается до 5-10׳. Следует полагать, что если бы для производства сельсинов использовали ту же технологию, что и для ВТ, то погрешности были бы практически одинаковы. Габаритные размеры ВТ меньше, чем у сельсинов. Наиболее часто используемые серии ВТ имеют диаметр 20 — 25 мм (иногда 50 мм); диаметр сельсинов 62 мм.
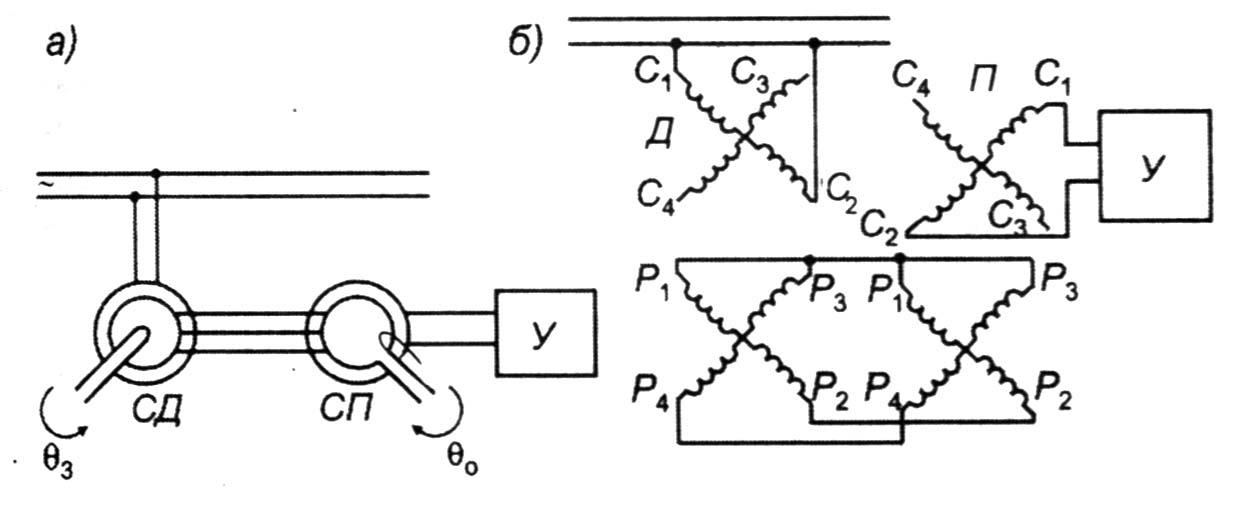
Рис 1.1. Измерители рассогласования с индукционными датчиками:
а — с сельсинами, работающими в трансформаторном режиме;
б — с вращающимися трансформаторами
К недостаткам сельсинов следует также отнести ограничения на предельную частоту вращения 250-500 об/мин. При больших частотах возрастает погрешность за счет влияния ЭДС вращения.
Хотя в настоящее время в позиционных системах в основном используются вращающиеся трансформаторы, в книге рассматриваются оба вида индукционных датчиков. Это обусловлено еще тем обстоятельством, что физику процессов следящих систем в учебном процессе проще пояснить на примере системы с сельсинами.
Как известно, в согласованном положении ось ротора сельсина приемника должна быть повернута относительно статора на угол, отличающийся от положения ротора датчика на π/2 [3], при этом на выходе имеем нулевой сигнал. При рассогласованном положении
E = Eмaxsin ε, (1.3)
где Емах — максимальная ЭДС, наводимая в роторе сельсина приемника при рассогласовании на угол π/2; ε — угол рассогласования.
Как видно, характеристика (1.3) достаточно близка к линейной лишь при малых углах, до ε = π/6. Далее она существенно отклоняется от линейного закона. Это обстоятельство не является нежелательным. Напротив, при больших углах рассогласования целесообразно ограничить напряжение на входе усилителя. Часто даже применяются специальные устройства для ограничения сигнала.
Следует иметь в виду, что равенство нулю напряжения на выходе датчика может иметь место также при угле рассогласования ε = ± 180°, когда также sin ε = 0. Это будет так называемый неустойчивый (ложный) нуль. При малейшем отклонении от этого положения система будет стремиться отработать рассогласование, так как возникнет соответствующий момент исполнительного двигателя системы.
Как отмечалось, использование вращающихся трансформаторов имеет преимущество в том отношении, что они обеспечивают меньшую погрешность. Вращающиеся трансформаторы — прецизионные машины, предназначенные для работы в аналоговых вычислительных комплексах и у лучших из них собственная погрешность на два порядка меньше, чем у сельсинов.
Однако иногда и точность, обеспечиваемая вращающимися трансформаторами в трансформаторном режиме, может быть недостаточна. Тогда прибегают к системе двойного отсчета — грубого и точного. Датчики грубого отсчета устанавливаются непосредственно на осях механизма и задающего устройства без каких-либо механических передач. Напротив, датчики точного отсчета соединяются с этими осями посредством повышающих механических передач — мультипликаторов М (рис. 1.2) с передаточным отношением n = 20÷30. При наличии прецизионного силового редуктора между двигателем и объектом сельсины или вращающиеся трансформаторы точного отсчета могут быть подключены и к одной из осей силового редуктора, связанной с двигателем малым передаточным отношением. В обоих случаях крутизна характеристики точного отсчета возрастает. Одному и тому же углу рассогласования соответствует значительно большее напряжение выхода. Однако при этом один полный период изменения напряжения отвечает. углу поворота оси в n раз меньшему. Таким образом, возникаете положений равновесия. Грубая система поэтому и предназначается для синхронизации системы и ввода ее в зону действия точного отсчета.

Рис. 3.4. Измеритель рассогласования на сельсинах с двумя каналами: грубого и точного отсчетов. П - переключающее устройство
Необходимо остановиться на выборе передаточного отношения редуктора между осями сельсинов грубого и точного отсчетов. При четном передаточном отношении и рассогласовании на угол ± π, когда на сельсинах грубого отсчета имеет место неустойчивое нулевое положение, у сельсинов точного отсчета будет устойчивый нуль, что приведет к нарушению работы системы и она останется в положении около ±. π. В связи с этим вынужденно приходится использовать для редуктора нечетные передаточные отношения. Тогда одновременно могут возникнуть только неустойчивые нулевые положения. Однако это неудобно для построения шкал, фиксирующих положение осей. Поэтому чаще все же используют четные передаточные отношения, но в канал грубого отсчета дополнительно вводится постоянное по амплитуде напряжение Uсм от вторичной обмотки трансформатора, питаемого от той же сети, к которой подключены сельсины. При этом сдвигаются точки прохождения сигналов через 0 при ε ≈ ± π, чем всегда обеспечивается синхронизация системы (рис. 1.3). Однако одновременно смещается и положение действительного нуля (из точки 0 в точку 0'), что корректируется поворотом ротора одного из сельсинов грубого отсчета относительно его муфты на соответствующий угол ψ. В итоге ложный нуль в системе точного отсчета смещается относительного ложного нуля грубой системы на угол 2 ψ. При этом угле уверенно должна вступать в действие система грубого отсчета.
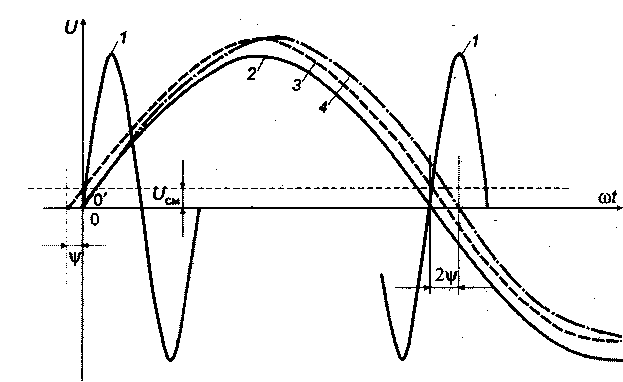
Рис. 1.3. Введение напряжения смещения Uсм в канал грубого отсчета для устранения ложного нуля:
1 - напряжение канала точного отсчета; 2 - напряжение канала грубого отсчета;
-
- напряжение канала грубого отсчета после введения смещающего напряжения;
-
- результирующее напряжение; ψ - угол, на который должен быть повернут
ротор сельсина грубого отсчета
Увеличение передаточного отношения повышающей механической передачи свыше n= 40 обычно нецелесообразно, так как уменьшение погрешности канала точного отсчета съедается ростом погрешности самого механизма передачи за счет увеличения числа зубчатых колес и роста зазоров. По этой же причине нецелесообразно и использование трехотсчётной системы.
Для переключения каналов грубого и точного отсчетов в простейшем случае может использоваться релейная схема с реле минимального напряжения, включенного в канал грубого отсчета. В настоящее время применяются бесконтактные схемы типа, представленного на рис. 1.4. Здесь используются нелинейные характеристики диодов. При больших рассогласованиях в основном работает канал грубого отсчета, так как при этом падение напряжения на диодах VD1 мало. Напротив, в зоне, близкой к согласованному положению, канал грубого отсчета практически отключается, а напряжение канала точного отсчета сосредотачивается на диодах VD2, т. е. на входе усилителя.
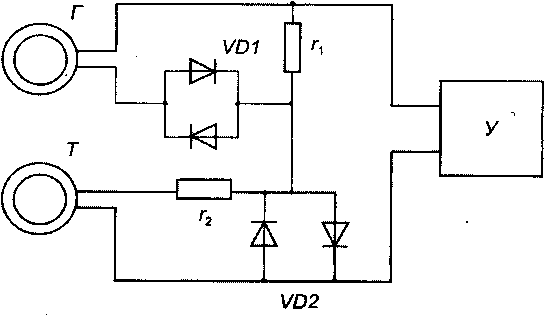
Рис. 1.4. Диодная схема переключения каналов грубого и точного отсчетов
Мультипликатор в системе измерителя является весьма нежелательным звеном, так как он вносит свои погрешности и увеличивает габариты установки, поэтому в каналах точного отсчета целесообразно использовать многополюсные электромашинные датчики с электрической редукцией (например, многополюсные вращающиеся трансформаторы). При этом как датчики грубого, так и точного каналов устанавливаются непосредственно на оси исполнительного механизма, который должен отслеживать заданное перемещение, и на оси задающего устройства.
К многополюсным датчикам угла в первую очередь относят многополюсные вращающиеся трансформаторы. Следует иметь в виду, что погрешность их меньше, чем двухполюсных за счет исключения влияния эксцентриситета и асимметрии магнитной цепи. Также в каналах точного отсчета могут использоваться редуктосины, индуктосины и другие многополюсные датчики [3, 41]. Эти датчики выполняются и как датчики линейных перемещений, что иногда бывает необходимо для отработки поступательного движения, как, например для подач в металлорежущих станках.
На выходе любых индукционных электромашинных датчиков сигнал рассогласования накладывается на напряжение несущей частоты, поэтому в следящих системах, работающих на постоянном токе, после устройства измерения рассогласования должен быть включен демодулятор — фазочувствительный выпрямитель или усилитель. Схема одного из простейших двух-полупериодных демодуляторов, а именно кольцевого демодулятора, представлена на рис. 1.5.

Рис. 1.5. Кольцевой демодулятор
Диоды VD1, VD2 и VD3, VD4 попарно поочередно коммутируются за счет опорного (коммутирующего) напряжения, подключая к выходу соответственно одну из полуобмоток входного трансформатора Твх. При отсутствии сигнала на входе, т. е. при отсутствии рассогласования, напряжение на выходе практически равно нулю. Появление напряжения на входе нарушает равновесие мостовой схемы. Входное напряжение в зависимости от его фазы относительно фазы коммутирующего напряжения Uоп создает ток, протекающий в нагрузке в оба полупериода в одном неизменном направлении. Таким образом, полярность выходного напряжения определяется фазой сигнала на входе Uвх. На схеме условно показаны полярности напряжений при работе диодов VD1 и VD2.
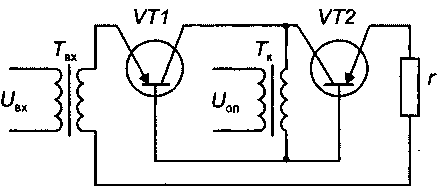
Более совершенными являются ключевые демодуляторы, обладающие большим входным сопротивлением, линейностью характеристик и т. д. В схеме обычно используются два транзистора (рис. 1.6), работающие с общей базой. Управление ключом осуществляется коммутирующим — опорным напряжением Uоп, поступающим из той же сети, от которой питаются сельсины. При отрицательном потенциале на базах оба транзистора одновременно открываются.
На схеме показан ключевой демодулятор в однополупериодном исполнении. В двухполупериодном демодуляторе всё дублируется и создаются два канала. Трансформатор Тк имеет при этом две независимые обмотки, а трансформатор Твх две секции вторичной обмотки, к средней точке которых подключается нагрузочное сопротивление. В настоящее время ключевые схемы выпускаются в модульном исполнении. На выходе демодулятора для исключения высокочастотных составляющих напряжения, как правило, приходится включать фильтр — конденсатор. Поэтому следует учитывать, что демодулятор обладает некоторой постоянной времени.