

2.3. Выбор передаточного отношения редуктора
Длительность переходных процессов в первую очередь зависит от механической инерции. С увеличением момента инерции она возрастает, однако приведенный момент инерции У зависит не только от реальных масс в системе двигатель - рабочая машина, но и от передаточного отношения редуктора, связывающего двигатель с рабочей машиной:
![]()
Здесь Jд - момент инерции двигателя; Jмех- момент инерции рабочей машины; δ - коэффициент, учитывающий инерционные элементы механической передачи, связанные с осью двигателя; j - передаточное отношение редуктора.
Следует выяснить, при каком передаточном отношении редуктора длительность переходных процессов будет минимальной. Согласно (2.2), длительность процесса разгона двигателя
Соответственно для торможения будем иметь

Для позиционной системы и с некоторым допущением для следящего привода характерна трапецеидальная диаграмма скорости (см. рис. 2.5). Так как
![]()
![]()
Отсюда следует, что отрабатываемый путь графически представляет собой площадь трапеции. Для минимизации времени отработки задания должна быть до возможного предела уменьшена длительность разгона и торможения. На среднем, рабочем участке электродвигатель вращается с расчетной скоростью.
Следует отметить, что для повышения быстродействия целесообразно иметь передаточное отношение редуктора несколько меньше, чем определяемое из условия обеспечения установившейся скорости механизма при номинальной скорости двигателя. При этом двигатель в процессе работы не достигает номинальной скорости и может работать по треугольному графику.
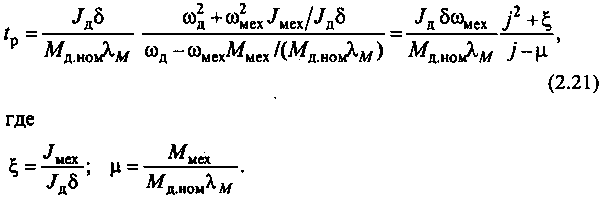
Суммарная длительность переходных режимов разгона и торможения может быть представлена как
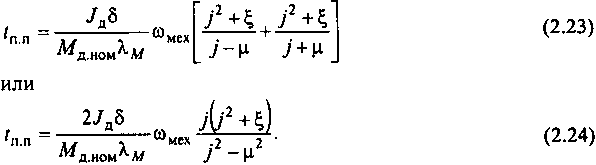
Для определения условий обеспечения минимума длительности переходных процессов возьмем производную от tп.п по j и приравняем ее нулю
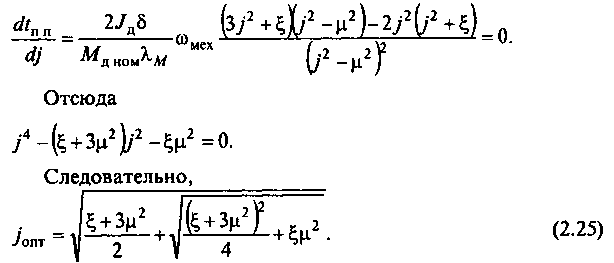
Отрицательные знаки в полученном выражении исключены, так как передаточное отношение не может быть отрицательным.
Пренебрегая моментом механизма, т. е. полагая μ = 0, приходим к упрощенному выражению
![]()
которое часто приводится в учебных пособиях. Следует иметь в виду, что это выражение иногда дает искаженные результаты, так как хотя приведенный статический момент Mc, в следящих системах обычно составляет не более 20-25% от номинального момента двигателя, величина момента Ммех, отнесенная к оси самого механизма, может во много раз превышать Mд.ном и соответственно μ2 может быть соизмеримо с ξ.
Графики оптимального передаточного отношения редуктора представлены на рис. 2.9. Эти кривые могут быть использованы для расчета редуктора в следящих системах. Как видно из рисунка, крутизна кривых невелика и, следовательно, даже, существенное отклонение j от расчетного значения не должно приводить к заметному увеличению времени отработки перемещения в следящем приводе.
Зависимость оптимального передаточного отношения от соотношения моментов μ представлена на рис. 2.10. Этот рисунок подтверждает необходимость учета статического момента.
Следует иметь в виду [30], что аналогичную форму имеют и характеристики передаточного отношения редуктора, оптимального по обеспечению минимума нагрева двигателя (рис. 2.11). При их построении принято αMд.ном /Jдω2мax = 1000, где α - площадь трапеции. Интересно, что, полагая μ = 0, и в этом случае выражение для jопт. приводится к виду (2.26).
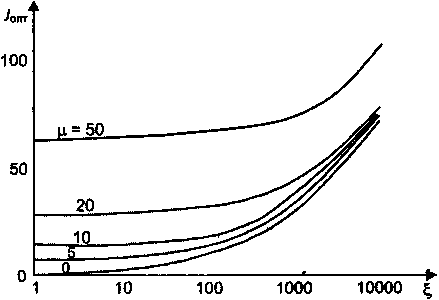
Рис. 2.9. Зависимость оптимального по быстродействию передаточного
отношения редуктора от соотношения моментов инерции механизма
и двигателя для случая трапецеидального графика скорости
В некоторых случаях с целью уменьшения потерь в якоре двигателя используют не трапецеидальную диаграмму скорости, а параболическую (рис.2.12); при этом снижаются потери и возможна экономия энергии, однако при параболическом законе возникают чрезмерные пики тока в начале и конце процесса отработки пути.
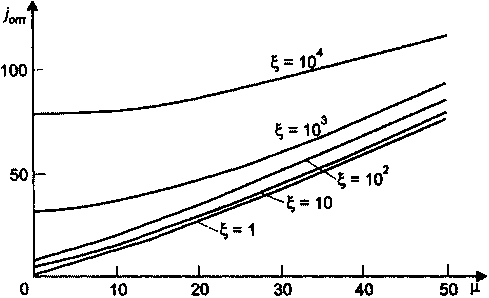
Рис. 2.10. Зависимость оптимального по быстродействию передаточного отношения редуктора от относительного статического момента на валу механизма
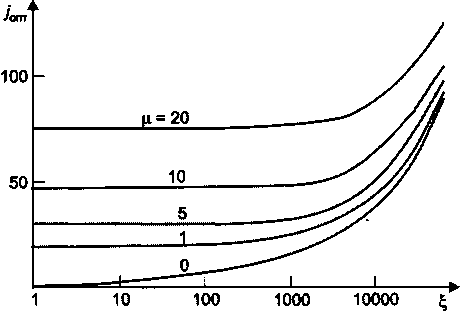
Рис. 2.11. Зависимость оптимального (минимального) по нагреву двигателя передаточного отношения редуктора от соотношения моментов инерции механизма и двигателя
При параболическом изменении скорости ток и момент изменяются по линейному закону и уравнение движения имеет вид

где Ммах - момент двигателя в начале и конце процесса; tц - длительность цикла.
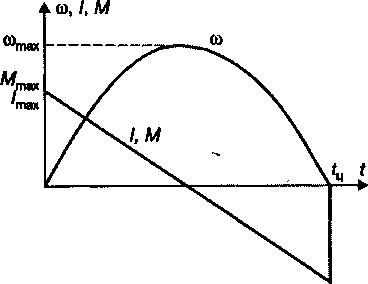
Рис. 2.12. Параболический график скорости отработки заданного перемещения и соответствующая диаграмма тока якоря
Отсюда

Следует иметь в виду, что допустимая по перегрузочной способности двигателя величина Ммах ограничивает возможные ускорения в системе.
Приравнивая производную от скорости по времени нулю, можно найти время достижения максимума скорости:

Выражение для скорости получим, интегрируя уравнение (2.28) в пределах от 0 до tц. При этом найдем


Максимальное значение скорости определим, подставив tмах из (2.29)
Далее необходимо найти путь, проходимый за один цикл tц

αмех = α/j (2.33)
Подставим в (2.32) выражения для момента инерции системы (2.20) и момента статического сопротивления на оси механизма Mмех = Mcj. При этом будем иметь

откуда

Введем относительные величины
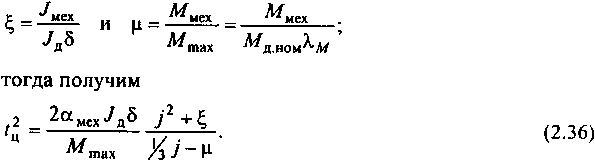

![]()
Соответственно оптимальное значение передаточного отношения будет
![]()
Построенные согласно этому выражению кривые представлены на рис. 2.13.
Приняв условие μ = 0, вновь получим выражение (2.26):
![]()
Как следует из рис. 2.13, в пределах малых значений ξ (ξ ≤ 100) величина оптимального по быстродействию передаточного отношения редуктора практически остается неизменной и зависит только от величины статического момента. В первом приближении при ξ = 0, как следует из (2.39), joпт = 6μ.
Полученные выражения (2.25), (2.39) для оптимального передаточного отношения редуктора позволяют учесть влияние постоянного статического момента Мс на оси механизма. Однако они не обеспечивают должной точности определения jопт, так как наличие Мс приводит к деформации скоростной диаграммы.
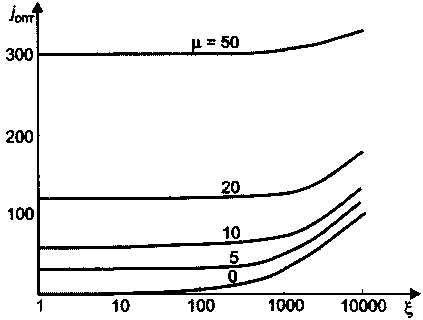
Рис. 2.13. Зависимость оптимального по быстродействию передаточного отношения редуктора от соотношения моментов инерции механизма и двигателя для случая параболической диаграммы скорости
Как следует из (2.29), время достижения максимума скорости становится отличным от tц/2. При треугольной диаграмме, как следует из выражений (2.21) и (2.24),
Следовательно, при учете Мс вершина треугольника смещается в сторону больших значений t.
При конструировании редукторов, соединяющих двигатель с объектом управления, следует избегать элементов механической передачи с самоторможением, как, например, червячных пар. В тормозном режиме при изменении направления потока энергии за счет активного статического момента на оси механизма или при наличии момента инерции механизма, превышающего момент инерции двигателя, возможно заклинивание механической передачи.
В современных следящих системах наряду с двигателями, питаемыми от управляемых выпрямителей или ШИП, и с асинхронными двигателями с частотным управлением достаточно широкое применение еще находят двухфазные двигатели. Качественные показатели таких систем - точность отработки задания, быстродействие и другие - хуже. Однако они отличаются простотой, высокой надежностью, конструктивными преимуществами и т. д. Питание обмотки управления осуществляется от простейшего дифференциального транзисторного или магнитного усилителя. В связи с этим применение их в настоящее время еще достаточно широко. Для повышения быстродействия двухфазные двигатели обычно имеют критическое скольжение, близкое к 1, как среднее значение оптимальной величины для разгона и торможения противовключением [6,30]:
sk = (0,41 + 1,47)/2 = 0,94 ≈ 1.
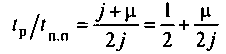
При этом механические характеристики имеют вид, показанный на рис.
Рис. 2.14. Механическая характеристика двухфазного асинхронного двигателя при s = 1 и аппроксимации ее отрезками прямых
Для исследования динамики поведения привода и оценки длительности процессов разгона и торможения характеристики двухфазного двигателя без внесения большой погрешности могут быть аппроксимированы двумя прямыми, соответствующими разгону и торможению. При этом длительность процессов на этих двух участках может быть оценена формулой с логарифмической зависимостью [16] вида

Здесь J - суммарный момент инерции всей электромеханической системы, ω1 и ω2 - начальная и конечная скорости на концах отрезка характеристики (для пуска 0 и ωк), Мдин1 и Мдин2 - соответствующие им значения динамического момента (для пуска Мдин1 = Ммах — Мс и Мдин2 = Мс — Мк, где Мк — момент при скорости переключения, т. е. при переходе в тормозной режим). Суммарная длительность перемещения при отработке скачкообразного сигнала будет
![]()

где tp - длительность разгона; tт - длительность торможения. Участки переходных характеристик будут иметь вид экспоненциальных функций.
Рис. 2.15. Переходные характеристики двухфазного двигателя
Характер процесса при задании линейно нарастающей скорости показан на рис. 2.15, причем αр и αт - пути, проходимые на участках процесса. Представленные переходные характеристики относятся к режиму, приближающемуся к треугольному. При отработке больших дистанций будет третий дополнительный участок, соответствующий режиму постоянной скорости.
Для минимизации длительности процесса в системе с двухфазным двигателем также следует выбирать оптимальное по величине передаточное отношение редуктора [19]. На основе анализа фазовых траекторий при характеристиках, приближающихся к треугольным [19], было получено следующее выражение для оптимального по быстродействию передаточного отношения редуктора:

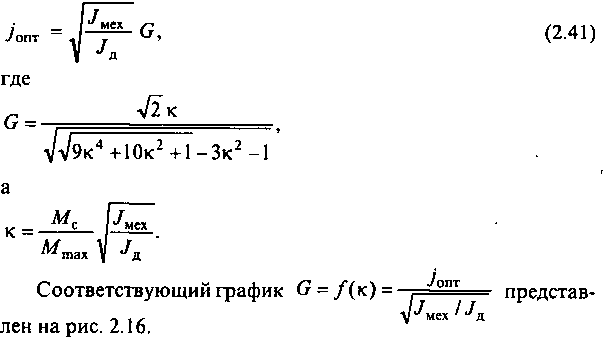
Рис. 2.16. График зависимости G =ƒ(к) в логарифмическом масштабе
При к = 0 выражение для G становится равным 1. Подставив G = 1 в (2.41), получим упрощенную формулу
![]()
Заметим, что при выборе передаточного отношения редуктора следует также учитывать влияние j на конструктивные особенности механической передачи, на возможность возникновения зазоров в зацеплениях и прочее.