

Структурные схемы и структурные преобразования. Структурные модели сау.
Обычно структурная схема САУ состоит из отдельных элементов соединенных последовательно или параллельно с помощью обратных связей. Каждый элемент имеет один вход и один выход и заданную передаточную функцию.
Существуют следующие правила структурных преобразований, которые позволяют по передаточным функциям отдельных элементов определить необходимую передаточную функцию всей системы.
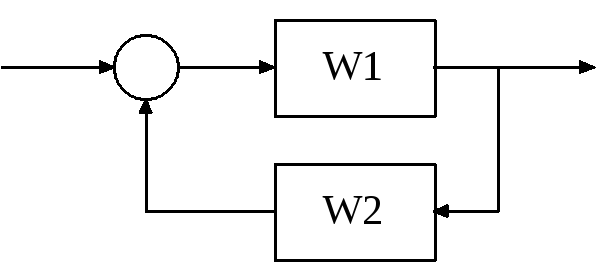
При последовательном соединении элементов передаточные функции перемножаются. При параллельном соединении передаточные функции суммируются. Правила структурных преобразований при наличии обратных связей показаны на рисунке 4.1.
![]()
а).
![]()
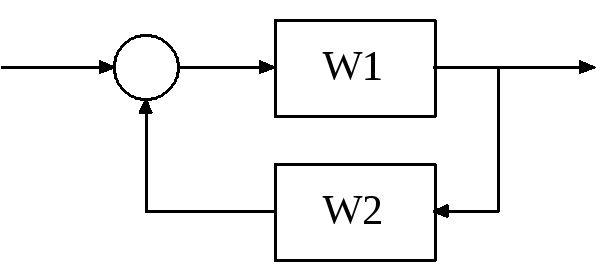
б).
Рис 4.1 Правила структурных преобразований при наличии обратных связей. а). – положительной, в). – отрицательной.
Рассмотренные правила позволяют для одноконтурных структур САУ получать эквивалентные передаточные функции, по возмущению, по отклонению и разомкнутой САУ.
Пусть задана структура одноконтурной САУ в виде представленном на рисунке 4.2.
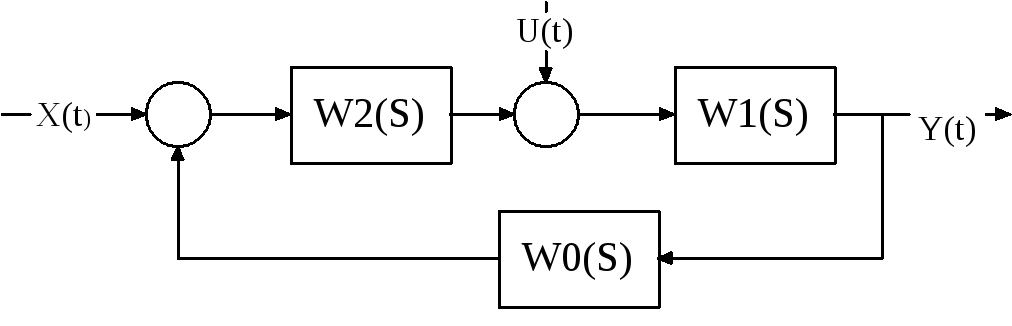
Рис. 4.2 Структурная схема одноконтурной САУ
Передаточная
функция разомкнутой системы ![]() определяется выражением:
определяется выражением:
![]()
Передаточная
функция замкнутой системы по управлению
![]() имеет следующий вид:
имеет следующий вид:
![]()
Передаточная функция замкнутой САУ по возмущению определяется следующим выражением:
![]()
Передаточная функция замкнутой САУ по ошибке имеет следующий вид:
![]()
Если задана многоконтурная структура САУ, то при помощи структурных преобразований она может быть приведена к одноконтурной. При этом используется ряд дополнительных правил, связанных с переносом элементов структурной схемы. Эти правила сведены в таблицы смотри учебник.
Типовые динамические звенья. Общие характеристики.
Для решения задач анализа и синтеза линейных САУ целесообразно проводить их в виде соединения между собой несложных элементов с определенными динамическими характеристиками.
Разнообразие реальных элементов САУ сводится к небольшому числу так называемых типовых звеньев. Типовым элементарным звеном называется такое звено, которое невозможно разделить на ещё более простые звенья. Типовые звенья характеризуются следующими общими свойствами:
Имеют одну входную и одну выходную величины
Описываются дифференциальным уравнением не выше 2-го порядка.
Пропускают сигнал только в одном направлении.
По динамическим характеристикам типовые звенья делятся на следующие группы: позиционные, дифференцирующие и интегрирующие. У позиционных звеньев наблюдается линейная зависимость меду входными и выходными сигналами. В дифференцирующем звене выходной сигнал пропорциональный производной во времени от входного сигнала. В интегральном звене выходной сигнал пропорционален интегралу во времени входного сигнала.
Передаточную функцию любой САУ в общем виде можно представить как сумму передаточных функций вида:
Типовые динамические звенья
Обычно система управления состоит из отдельных блоков, каждый из которых описывается уравнениями низкого порядка (чаще всего – первого или второго). Для понимания работы
системы в целом желательно хорошо представлять, как ведут себя ее отдельные элементы.
Кроме того, при построении ЛАФЧХ сложной системы передаточную функцию разбивают на
простейшие сомножители
![]()
и далее, воспользовавшись свойствами ЛАФЧХ, строят характеристики для всей системы как
суммы ЛАЧХ и ЛФЧХ отдельных звеньев.