

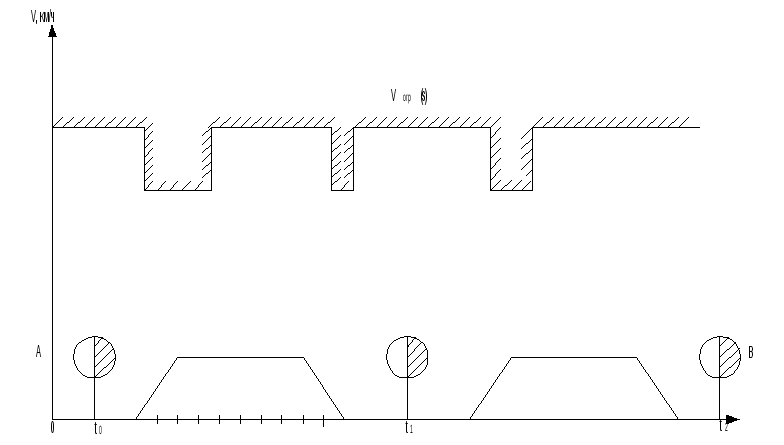
Синтез оптимального управляющего устройства
 U
U

 +1
+1



b t
 t1
t2
t1
t2

 -1
-1
От управления функцией времени переходим к управлению функцией фазовых координат с использованием синтезирующих функций и метода фазовой плоскости.
Задача : управление двигателем с независимым возбуждением
 (1)
(1)
Введём
фазовую плоскость с координатами
![]() и
и![]()
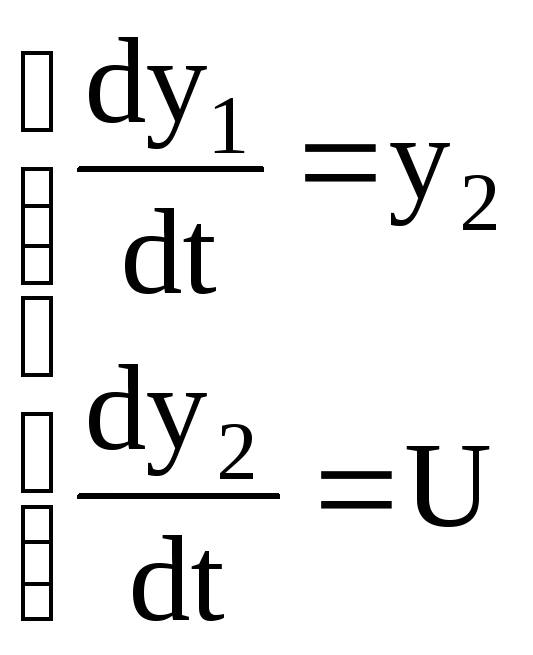
Тогда задача оптимального управления может быть сформулирована как задача наибыстрейшего перевода на фазовой плоскости (у1у2) из начальной точки в начало координат.
![]()
![]() (2)
- уравнение объекта
(2)
- уравнение объекта
U = +1 U = -1
![]() (3)
(3)
![]() (4)
(4)
Ф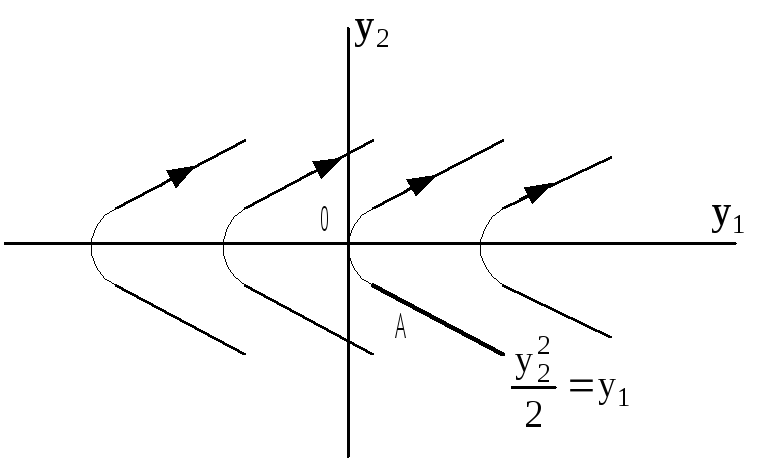
 азовые
траектории :
азовые
траектории :
По скольку цель управления – перевод точки из любой точки фазового пространства в начало координат, то заключительный этап движения будет проходить по траекториям АО и ВО, т.о. движение системы на следующем отрезке будет проходить по линии переключения.
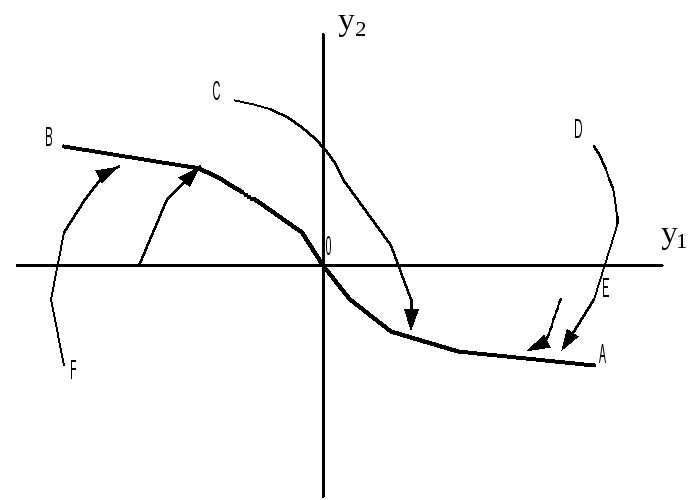
![]() (5)
линия переключения АОВ
(5)
линия переключения АОВ
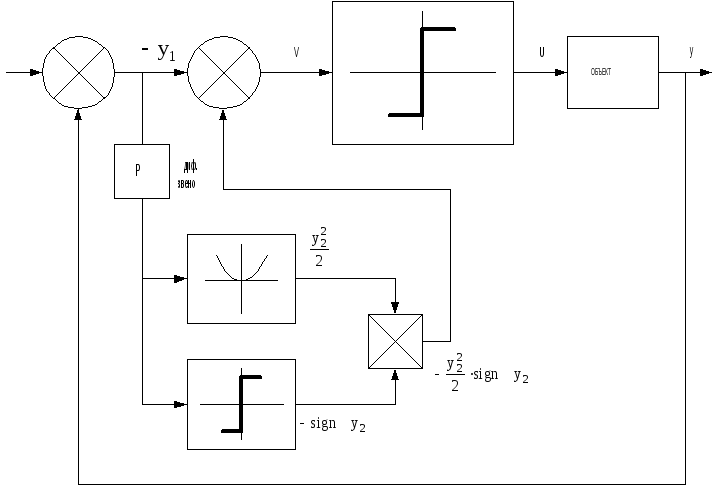
![]()
V = 0 – если находимся на линии переключения
V < 0 - U = -1
V > 0 - U = +1
![]()
V – синтезирующая функция, позволяющая перейти от управления функцией времени к управлению функцией фазовых координат.
 Основным
недостатком
метода является неизвестное значение
введённой в гамильтониане ψ-функции.
Основным
недостатком
метода является неизвестное значение
введённой в гамильтониане ψ-функции.
Управляющее
воздействие U1
…
U2
– подвержено ограничениям типа насыщение.
Выбирается так, чтобы иметь максимальным
![]() ,
что даёт
,
что даёт![]() ,
,![]() (6)
(6)
 (7)
(7)
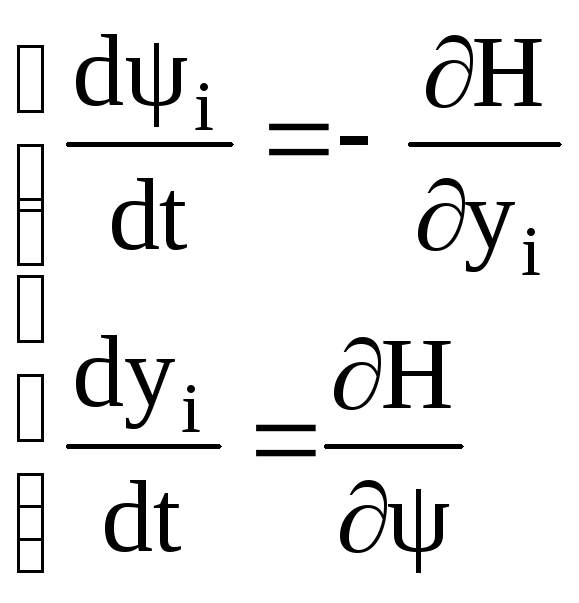
Начальные
условия : 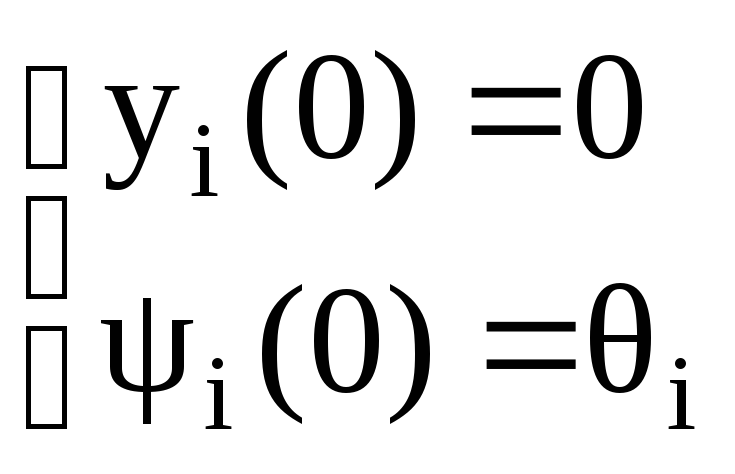 (8)
(8)
Имея Ui , выбранное согласно (6) уравнения (7) решаем через нач. условия (8).
Это
даёт : ![]() (9)
(9)
![]() (10)
(10)
Подставляя (9) и (10) получим :
![]()
![]() (11)
(11)
Наконец, исключив время t и θ из (11) получим :
![]() -
управляющее воздействие, зависящее от
фазовых
-
управляющее воздействие, зависящее от
фазовых
координат.
Задача синтеза оптимального управления заменяется другой задачей. От (1) до (8) пройти несколько раз, т.е. несколько итераций.
3. Динамическое программирование
( дискретный вариант )
Метод динамического программирования был разработан в 50-ом году нашего столетия Р.Белманом для решения различных задач в области техники, экономики… Метод справедлив для таких систем, для которых справедлив принцип оптимальности.
Оптимальное поведение обладает тем свойством, что какое бы ни было первоначальное состояние и решение в начальный момент времени следующее решение должны составлять оптимальное поведение оптимального состояния, полученного в результате первого решения.
В
динамических системах, описываемых
дифференциальными уравнениями состояние
характеризуется вектором
![]() , поведение характеризуется изменениями
, поведение характеризуется изменениями![]() ,
а решение соответствует оптимальному
управлению
,
а решение соответствует оптимальному
управлению![]() .
Система, удовлетворяющая принципу
оптимальности обладает мартовскими
свойствами, т.е. поведение её на конечном
отрезке времени полностью определяется
управлением на этом отрезкеt1
≤
t ≤ t2
и состояние в момент времени t1.
.
Система, удовлетворяющая принципу
оптимальности обладает мартовскими
свойствами, т.е. поведение её на конечном
отрезке времени полностью определяется
управлением на этом отрезкеt1
≤
t ≤ t2
и состояние в момент времени t1.
Для динамических систем, описанных дифференциальными уравнениями, этот принцип обоснован и доказан, а для остальных систем принимается интуитивно.
 Принцип оптимальности
ранее применялся к таким системам,
математическое описание которых было
неизвестно, а состояния, критерий
оптимальности которых, задавались
экспериментальными значениями в
дискретные моменты времени. В этих
случаях принцип оптимальности принимался
интуитивно.
Принцип оптимальности
ранее применялся к таким системам,
математическое описание которых было
неизвестно, а состояния, критерий
оптимальности которых, задавались
экспериментальными значениями в
дискретные моменты времени. В этих
случаях принцип оптимальности принимался
интуитивно.