

Обсуждение уравнения Эйлера-Лагранжа

Дифференциальное уравнение Эйлера-Лагранжа – 2-го порядка.
Условия Лежандра: показывают, добились ли мы min или max функционала.
![]()
Задача с ограничением типа равенства
Формируется функция Лагранжа:
![]() ,
,
где
![]() -
неопределенный множитель Лагранжа.
-
неопределенный множитель Лагранжа.



![]()

Изопериметрическая задача
1 2 3 4 5 6






Р = const
Из всех рассмотренных участков надо выбрать один с максимальной площадью.
 (1)
(1)
 (2)
- ограничение
(2)
- ограничение
Здесь j=1…m
Bj – число
таких ограничений m
Задача : найти (1) при ограничении типа (2).
Образуется
функция Лагранжа:![]()
Уравнение
Эйлера-Лагранжа: ![]() (3)
(3)
Неизвестные:
y(x)
, ![]() ,
j=1…m
,
j=1…m
Для нахождения неизвестных используем уравнение Эйлера-Лагранжа (3) и m условий изопериметрического вида (2).
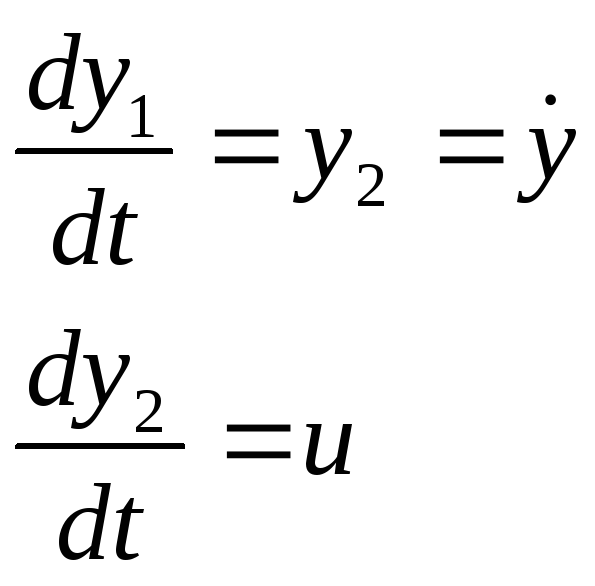
Пример: на оптимальную экономичность ( min потерь – задача типа 3 )
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
Уравнение
Эйлера-Лагранжа: ![]()
![]()
![]()
Неизвестные:
![]()
![]() (4)
(4)
![]()
![]() (5)
(5)
Из (4) и (5) получим:

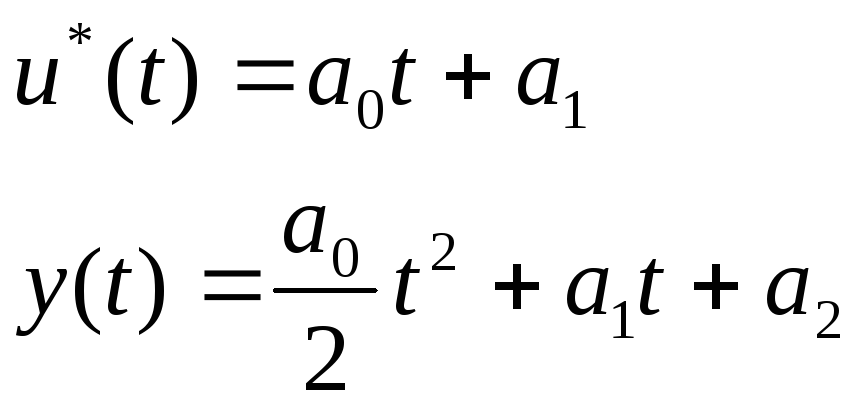
Оптимальное управление имеет вид:





![]()



![]() Если
взять любое другое
Если
взять любое другое
управление, то потери будут
больше.
T/2 T t






 -
-![]()



 y*(t)
y*(t)
![]()




 α0
α0
В озьмем
другое управление:
u*
озьмем
другое управление:
u*

 a
a
![]()

 T/2
T t
T/2
T t



 -a
-a
![]()


 y(t)
y(t)
![]()





 α0
α0
T/2 T t
Пример: задача типа 1 (на max быстродействие)

![]() Краевые
условия:
Краевые
условия: ![]()

![]()
![]()




Форма оптимального процесса в этой задаче аналогична предыдущей задаче.
Аналогичный вывод можно сделать и в отношении max производительности (задача 2).
Принцип взаимности
Если в одной задаче один интеграл выступает в качестве экстремизируемого, а другой в качестве изопериметрического ограничения, то решение этой задачи будет соответствовать решению другой задачи, в которой 2-ой функционал выступает в качестве экстремизируемого, а 1-ый в качестве ограничения.
Задача на максимальное быстродействие – это задача с незакрепленными концами. Мы её решили некорректно, поскольку на самом деле правый конец траектории (см. рис.) не закреплен.



 Т.е.
из всех кривых 1, 2, 3 надо выбрать такую,
Т.е.
из всех кривых 1, 2, 3 надо выбрать такую,
чтобы правый конец был бы ближе к нулю.
1 2 3
Т3<T2<T1
 T3
T2
T1
T3
T2
T1
Посмотрим, как полученное решение можно применить к схеме управления работой двигателя.
 u
u


![]()
τ/2 τ t




 -
-![]()
 Найденное
оптимальное управление в начальный
момент изменяется от 0 до
Найденное
оптимальное управление в начальный
момент изменяется от 0 до ![]() ,
но в рассматриваемой цепи ( Lя
и Rя
) можно добиться
максимального приближения, но самого
пика не будет ( из-за Lя), т.е. найденное
оптимальное решение можно считать
приближенным.
,
но в рассматриваемой цепи ( Lя
и Rя
) можно добиться
максимального приближения, но самого
пика не будет ( из-за Lя), т.е. найденное
оптимальное решение можно считать
приближенным.
Lя - мало Т- постоянная времени – мала.
Кроме того, мы считаем, что магнитный поток (возбуждение) постоянен, т.е. пренебрегали реакцией якоря, чего в больших электрических машинах делать не следует. В них для этого есть демпферная обмотка.
Мы пренебрегли изменением сопротивления якоря в переходном процессе, т.е. в процессе нагрева. А при изменении тока от 0 до max – эта величина Rя может изменяться на 60%.
Кроме того, мы не учли ограничения на управление.
“Вырывание” двигателя из системы управления упростило математическую постановку задачи, но перенесло трудности в техническую часть, поэтому необходимо быть особенно тщательным при постановке задач оптимального управления, создавая адекватную реальному объекту математическую модель и учитывая, по возможности, все ограничения.