

Логарифмические частотные характеристики.
ЛЧХ - зависимость относительной амплитуды колебаний и фазового сдвига от частоты, построенная в логарифмических или полу логарифмических координатах.
L(ω)=20 · lnA(ω) (4.4)

[L] дБ децибелы

декады
октава единицы измерения по оси частот
Декада - отрезок, который соответствует десятикратному изменению частоты
Октава - отрезок, который соответствует двукратному изменению частоты
![]()
ЛФЧХ -
зависимость фазового сдвига
![]() от десятичного логарифма частоты.
от десятичного логарифма частоты.
Частоты на этих графиках наносят в логарифмическом масштабе, а указывают натуральное значение.
Применение логарифмического масштаба удобно возможностью показать широкий диапазон изменения частот. С помощью этих характеристик можно оценить ряд важных показателей, которые характеризуют устойчивость и качество системы.
Виды соединения систем. Правила преобразования структурных схем
Структурной схемой системы называется условное изображение системы, отражающее её состав и характер взаимодействия элементов, с точки зрения их внутренних динамических свойств.
На структурной схеме указывают передаточные функции соответствующих элементов.
Чтобы оценить динамические свойства системы в целом, необходимо уметь определить передаточную функцию системы в целом.
Для такого расчёта используют правила преобразования структурных схем. В основе всех правил преобразования лежит понятие эквивалентного звена, то есть звена динамические свойства которого равнозначны, совокупным динамическим свойством группы, заменяемых звеньев.
Последовательные соединения.

W(S) =W1(S)·W2(S)·W3(S) (4.5)
Параллельное соединение

Wэкв(S) = W1(S)+W2(S) (4.6)
Соединение с обратной связью

![]() (4.7)
(4.7)
![]() (4.7’)
(4.7’)
Прямой цепью называется участок системы, который передаёт сигнал от выхода к выходу.
Разомкнутой цепью называется цепочка последовательных соединений звеньев, которые входят в замкнутый контур.
Типовые динамические звенья.
Технические средства, из которых состоит система АУ конструктивно очень разнообразны, они выполняют разные функции их динамические свойства описываются дифференциальными уравнениями а так же с помощью динамических характеристик. Типовыми звеньями называются элементы САУ поведение которых можно описать одинаковыми дифференциальными уравнениями.
Группы типовых динамических звеньев:
Позиционные
 ,
,
 ,
k = 1.
,
k = 1.Интегрирующие
![]()
Дифференцирующие


 Позиционное звено
Позиционное звено
 Интегрирующее
звено
Интегрирующее
звено
3.

![]()
![]()
![]()
![]()
![]()
![]()
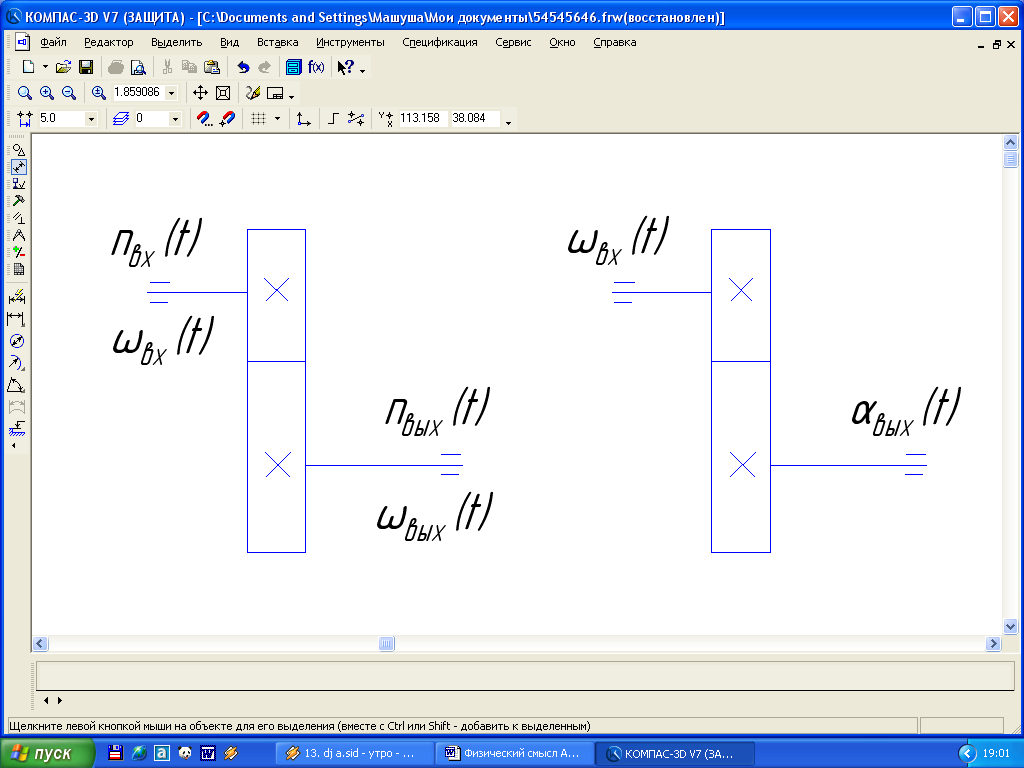
Изображение на структурных схемах.
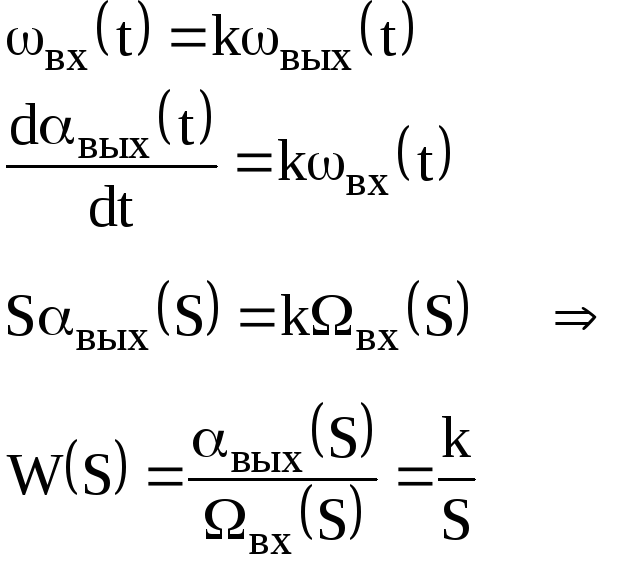
Уравнение движения звена в операторной и дифференциальной форме.
Передаточная функция звена.
Примеры реализации звена.
Переходные характеристики (поведение звена в переходном виде).
Поведение звена в установившемся режиме – амплитудно-фазовая частотная характеристика.
Логарифмические частотные характеристики.
Позиционные звенья
1. Безынерционные (усилительные).
1.

разгонная характеристика
2.
![]() - дифференциальная форма
- дифференциальная форма
![]() - операционная
форма
- операционная
форма
3.
![]() - передаточная функция звена
- передаточная функция звена
4. Примеры реализации звена:
• механические передачи (рычаги, редукторы) при их тщательном изготовлении.
• электр. усилители

• делитель напряжений

5. Выходная характеристика

Импульсная характеристика

6. Поведение звена в установившемся режиме – АЧХ
![]()

7. ЛЧХ
![]()
![]()
![]()

2. Инерционные
1.

разгонная характеристика
2.
![]() - дифференциальная форма
- дифференциальная форма
![]() - операционная
форма
- операционная
форма
3.
![]() - передаточная функция звена
- передаточная функция звена
4. Примеры реализации звена:
• магнитный усилитель • термопара

• электродвигатель

![]() ~
~![]()
![]() электромеханическая
постоянная
электромеханическая
постоянная
Выходная характеристика
![]()


Импульсная
характеристика
![]()
![]()

АФЧХ:
![]()
Re Im
действительная часть всегда Re > 0
мнимая часть всегда Im < 0
ф-ция находится в IV четверти

![]()
![]()
При
ω![]() 0 A(0)=K φ(0)=0;
0 A(0)=K φ(0)=0;
При
ω![]() ∞ A(∞)=0 φ(∞)= -π/2;
∞ A(∞)=0 φ(∞)= -π/2;

Логарифмическо-частотные характеристики:
![]()
![]()
![]() ∞
∞
![]() дБ можно
пренебречь
дБ можно
пренебречь
И тогда строят как асимптотическую ЛАЧХ. Это ЛАЧХ состоящая из двух прямолинейных отрезков.

1 – асимптотическая ЛАЧХ инерционного звена
2 – точечная ЛАЧХ инерционного звена
![]() собственная
частота звена.
собственная
частота звена.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() дБ
дБ
ЛФЧХ:
![]()
![]()
![]()
![]()
Кососиметричная кривая с точкой перегиба:

3. Колебательное звено (позиционное)
Изображение на структурной схеме


![]()
![]()
![]() коэффициент
демпфирования (кси)
коэффициент
демпфирования (кси)
![]()
![]() отсутствие потерь
на трение
отсутствие потерь
на трение