

2.7.1. Пропорциональное звено
Это звено, для которого в любой момент времени выходная величина пропорциональна входной.
Его
уравнение: y(t) = k![]() u(t).
u(t).
Передаточная функция: W(p) = k.
Переходная
характеристика: h(t) = k![]() 1(t).
1(t).
Любое реальное звено обладает инерционностью, но с определенной точностью. Некоторые реальные звенья могут рассматриваться как безынерционные, например, жесткий механический рычаг, редуктор, потенциометр, электронный усилитель и т.п. (рис.2.17).
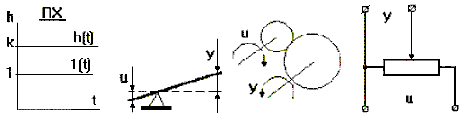
Рис.2.17
В ответ на единичное ступенчатое воздействие сигнал на выходе мгновенно достигает величины в k раз большей, чем на входе и сохраняет это значение (рис.2.17). При k = 1 звено никак себя не проявляет, а при k = - 1 - инвертирует входной сигнал.
Зная передаточную функцию звена W(p) легко получить все его частотные характеристики. Для этого необходимо подставить в нее jω вместо p, получим АФЧХ W(jω). Затем надо выразить из нее вещественную ЧХ P(ω) и мнимую ЧХ Q(ω). После этого преобразуют АФЧХ в показательную форму и получают АЧХ A(ω) и ФЧХ φ(ω), а затем определяют выражение ЛАЧХ L(ω) = 20lgA(ω) (ЛФЧХ отличается от ФЧХ только масштабом оси абсцисс).
АФЧХ: W(jω) = k.
ВЧХ: P(ω) = k.
МЧХ: Q(ω) = 0.
АЧХ: A(ω) = k.
ФЧХ: φ(ω) = 0.
ЛАЧХ: L(ω) = 20lgk.
Некоторые
ЧХ показаны на рис.2.18.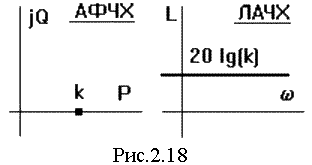 Звено пропускает все частоты одинаково
c увеличением амплитуды вk
раз и без сдвига по фазе.
Звено пропускает все частоты одинаково
c увеличением амплитуды вk
раз и без сдвига по фазе.
2.7.2 Интегрирующее звено
Его
уравнение
![]() ,
или
,
или![]() ,
или py = ku.
,
или py = ku.
Передаточная функция: W(p) = k/p.
Переходная
характеристика:
![]() (рис.2.19).
(рис.2.19).

Рис.2.19
При k = 1 звено представляет собой “чистый” интегратор с передаточной функцией W(p) = 1/p. Интегрирующее звено неограниченно «накапливает» входное воздействие. Примеры интегрирующих звеньев: двигатель постоянного тока с независимым возбуждением, поршневой гидравлический двигатель, емкость и т.п. Введение его в САУ превращает систему в астатическую, то есть ликвидирует статическую ошибку.
А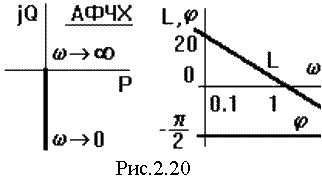 ФЧХ:
ФЧХ:![]()
ВЧХ: P(ω) = 0.
МЧХ: Q(ω) = – 1/ω.
АЧХ: A(ω) = 1/ω.
ФЧХ: φ(ω) = – π/2.
ЛАЧХ: L(ω) = 20lg(1/ω) = – 20lg(ω).
ЧХ показаны на рис.2.20. Все частоты звено пропускает с запаздыванием по фазе на 90º. Амплитуда выходного сигнала увеличивается при уменьшении частоты, и уменьшается до нуля при росте частоты (звено «заваливает» высокие частоты). ЛАЧХ представляет собой прямую проходящую через точку L(ω) = 0 при ω= 1. При увеличении частоты на декаду ордината уменьшается на 20lg10 = 20дб, то есть наклон ЛАЧХ равен - 20 дб/дек (децибел на декаду).
2.7.3. Апериодическое или инерционное звено
Это
одно из самых распространенных звеньев
в САУ. Оно описывается уравнением
![]() или y + Tpy = ku.
или y + Tpy = ku.
Передаточная
функция:
![]()
Переходная характеристика может быть получена с помощью формулы Хевисайда:
 ,
,
где p1 = - 1/T - корень уравнения D(p) = Tp + 1 = 0; D'(p1) = T.
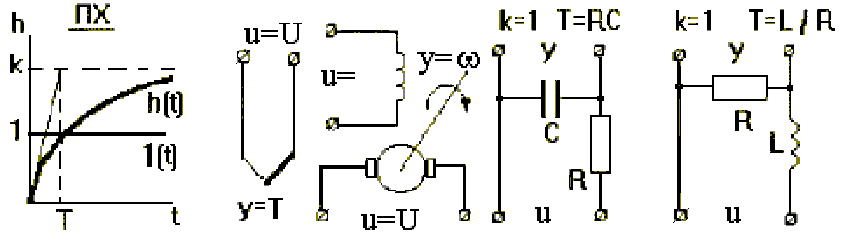
Рис.2.21
Переходная характеристика имеет вид экспоненты (рис.2.21), по которой можно определить передаточный коэффициент k, равный установившемуся значению h(t), и постоянную времени Т по времени t, соответствующему точке пересечения касательной к кривой в начале координат с ее асимптотой. При достаточно больших Т звено на начальном участке может рассматриваться как интегрирующее, при малых Т звено приближенно можно рассматривать как безынерционное. Примерами апериодического звена могут служить термопара, электродвигатель, четырехполюсник из сопротивления и емкости или сопротивления и индуктивности.
При k = 1 получаем следующие выражения ЧХ:
АФЧХ: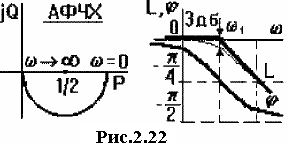
![]() ;
;
ВЧХ:
![]() ;
;
МЧХ:
![]() ;
;
АЧХ:
![]() ;
;
ФЧХ:![]()
ЛФЧХ:
![]() .
.
ЧХ показаны на рис.2.22. АФЧХ есть полуокружность радиусом 1/2 с центром в точке P = 1/2. При построении асимптотической ЛАЧХ считают, что при ω< ω1 = 1/T можно пренебречь (ωT)2 в выражении для L(ω), то есть L(ω)≈ – 20 lg1=0. При ω>ω1 пренебрегают единицей под корнем, то есть L(ω) ≈ – 20 lg(ωT). Поэтому ЛАЧХ проходит вдоль оси абсцисс до сопрягающей частоты, затем с наклоном – 20 дб/дек. Частота ω1 называется сопрягающей частотой. Максимальное отличие реальных ЛАЧХ от асимптотических не превышает 3 дб при ω= ω1.
ЛФЧХ асимптотически стремится к нулю при уменьшении ω до нуля (чем меньше частота, тем меньше искажения сигнала по фазе) и к - π/2 при возрастании ω до бесконечности. Перегиб ЛФЧХ имеет место в точке ω= ω1 при φ(ω) = - π/4.