

1.3 Выбор состава оборудования для технологической линии.
Есть технологическая линия, то есть цепочка, последовательность операций.
На каждую операцию можно назначить оборудование только каго-то одного вида, а оборудования, способного работать на данной операции, - несколько видов.
Исходные данные для примера
-
i
1
2
3
j
1
2
1
2
1
2


10
8
4
5
8
9
12
8
4
6
9
9
20
18
6
8
10
12
![]()
Стоимость сырья
Расходы , связанные
с использованием единицы оборудования
j-го типа на i-ой
операции![]() Производительности, соответственно,
по выходу и входу
Производительности, соответственно,
по выходу и входу
![]() и
и
![]() для j-го типа оборудования,
претендующего на i-ую
операцию.
для j-го типа оборудования,
претендующего на i-ую
операцию.
Решение:
Для того, чтобы решить данную задачу методом динамического программирования введем следующие обозначения:
N = 3 – число шагов.
![]() - Технологическая
линия.
- Технологическая
линия.
![]()
![]()
![]() =
( )
=
( )
![]() – выбор оборудования
для i-ой операции.
– выбор оборудования
для i-ой операции.
Ui – область допустимых УВ на i-м шаге.
![]() т.е.
т.е.
Wi – оценка минимальной себестоимости, полученная в результате реализации i-го шага.
S – функция общего выигрыша т. е. минимальная себестоимость .
![]()
![]()
вектор – функция,
описывающая переход системы из состояния
в состояние
![]() под действием УВ.
под действием УВ.
![]() - вектор УВ на i-ом
шаге, обеспечивающий переход системы
из состояния xi-1
в состояние xi
, т.е. оптимальный выбор оборудования
за N шагов.
- вектор УВ на i-ом
шаге, обеспечивающий переход системы
из состояния xi-1
в состояние xi
, т.е. оптимальный выбор оборудования
за N шагов.
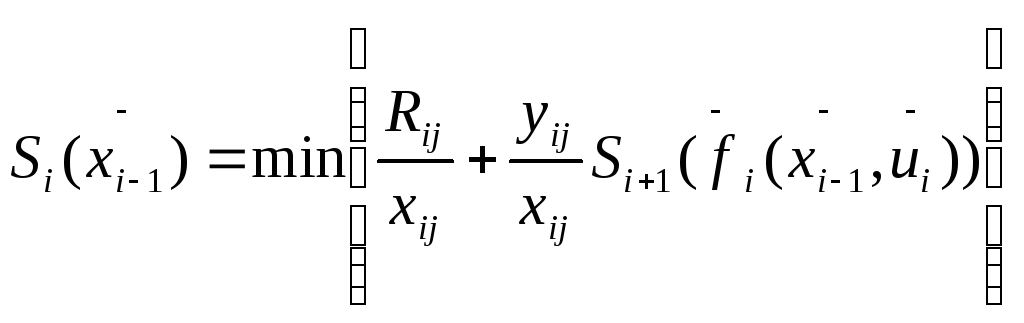
Si+1(![]() )
– максимальный выигрыш ( в нашем случае
минимальная себестоимость), получаемый
при переходе из любого состояния
)
– максимальный выигрыш ( в нашем случае
минимальная себестоимость), получаемый
при переходе из любого состояния
![]()
![]() в
конечное состояние
в
конечное состояние
![]() при оптимальной стратегии управления
начиная с (k+1)-го шага.
при оптимальной стратегии управления
начиная с (k+1)-го шага.
S1(![]() )
– максимальный выигрыш, получаемый за
N шагов при переходе
системы из начального состояния
)
– максимальный выигрыш, получаемый за
N шагов при переходе
системы из начального состояния
![]() в конечное
в конечное
![]() при реализации оптимальной стратегии
управления
при реализации оптимальной стратегии
управления
![]() .
Очевидно, что S = S1(
.
Очевидно, что S = S1(![]() ),
если
),
если
![]() =
0.
=
0.
Запишем вектора допустимых значений
![]()
![]()
![]()
Запишем вектора допустимых управляющих воздействий
![]()
![]()
![]()
З
![]()
![]() под действием УВ.
под действием УВ.
![]()
![]()
З
![]()
1) Обратный проход
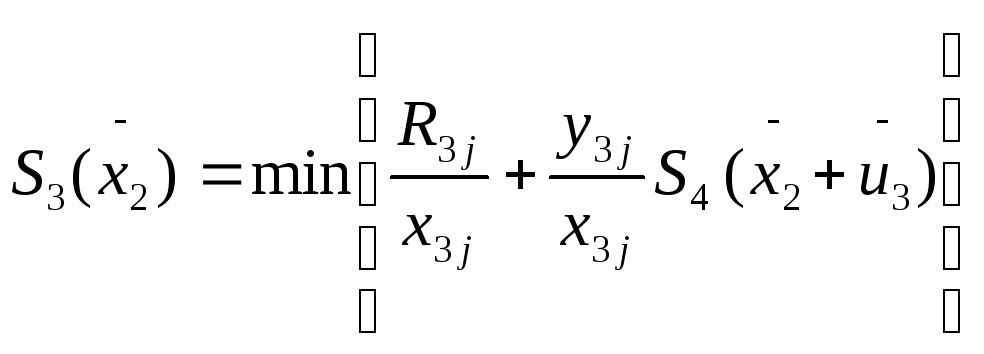
Для i=3
Учитывая то, что этот шаг у нас последний и следующей операции
у
![]()
![]()
возьмем стоимость сырья
![]()
![]()
![]()
при
![]() =
=
![]()
![]()
![]()
при
![]() =
=
![]()
![]()
т. е.
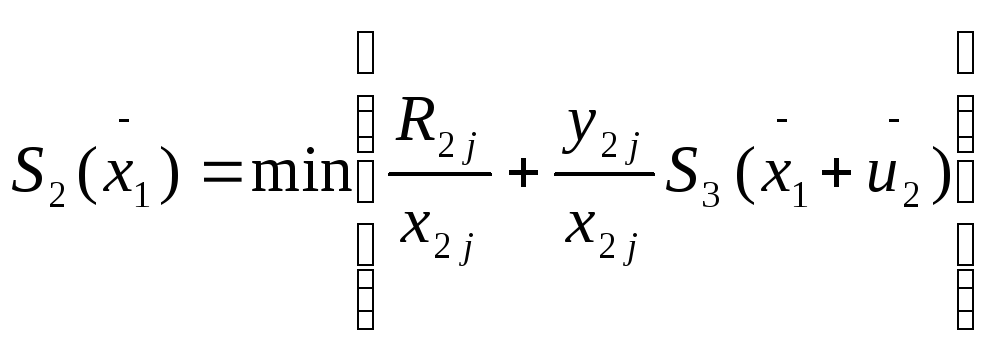
Для i=2
![]() 115,2
115,2![]()
при
![]() =
=
![]() 138,04
138,04![]()
при
![]() =
=
![]() 102,8
102,8![]()
при
![]() =
=
![]() 123,1
123,1![]()
при
![]() =
=
![]()
![]()
т. е.
Для i=1
![]() 140,2
140,2![]()
при
![]() =
=
![]() 125,3
125,3![]()
при
![]() =
=
п
![]() 125,3
125,3![]()
![]() =
=

![]() 125,3
125,3![]()
при
![]() ==
==
![]() 125,3
125,3![]()
при
![]() =
=
![]() 125,3
125,3![]()
при
![]() =
=
![]() 125,3
125,3![]()
при
![]() =
=
![]() 125,3
125,3![]()
![]()
![]()
т
![]()
-
П
рямой проход
Учитывая то,
что и
![]() =
(0,0,0) имеем
=
(0,0,0) имеем
![]()
![]()
![]()
![]()
i
![]()
![]()
Таким образом оптимальный выбор состава оборудования технологической линии предполагает следующее:
На 1-ую операцию назначим оборудование 2-го вида
На 2-ую операцию назначим оборудование 1-го вида
На 3-ью операцию назначим оборудование 2-го вида
Оценка минимальной себестоимости составит 105,5.