

I метод Ляпунова.
Т/1
Состояние равновесия [х0=0] дифференциального уравнения
![]() ,
где f(x)=0
,
где f(x)=0
[х – некоторая обобщённая координата]
является
асимптотически устойчивым, если состояние
равновесия соответствует свободной
линейной стационарной системы
![]() ,
где А=||
,
где А=||![]() 0,
явл-ся
асимптотически устойчивым.
0,
явл-ся
асимптотически устойчивым.
Т/2
Состояние равновесия
Ǿ дифференциального уравнения
![]() ,
где f(0)=0,
является неустойчивым.
,
где f(0)=0,
является неустойчивым.
Если состояние
равновесия Ǿ соответствует свободной
линейной стационарной системы
![]() ,
где А=||
,
где А=||![]() 0,
является
неустойчивым.
0,
является
неустойчивым.
Пр/1

![]()
В соответствии с Т1 продифференцированные правые части по х и y
![]()
Ax=|![]() |х,
где
|х,
где
![]() - собственные числа, которые находятся
из уравнения:
- собственные числа, которые находятся
из уравнения:
![]()
![]()
![]()
(1-![]() )2+1=0
)2+1=0
(1-![]() )1;2=±i
)1;2=±i
![]() 1,2=1±I a±i
1,2=1±I a±i![]()
eat
(sin
![]() b
+ cos
b
+ cos
![]() b)
b)
![]() ∞ ≤1
∞ ≤1
![]() неустойчивая
система (при а>0)
неустойчивая
система (при а>0)
устойчивая
система (t→∞;
a<0
![]() eat→0)
eat→0)
Так как a=1>0, то система неустойчива.
Пр/2



![]()
![]() <0
<0
![]() система
устойчива.
система
устойчива.
Пр/3
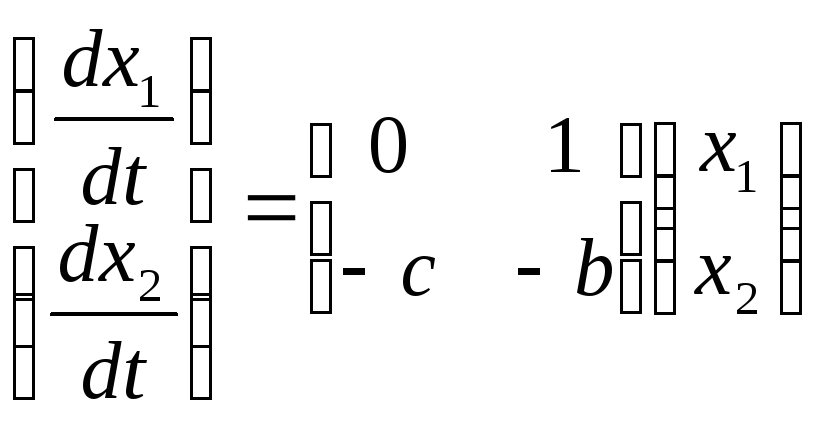
Упругие колебания маятника с учётом сил трения или сопротивления среды имеют вид:

b – коэффициент затухания
с – постоянная, зависящая от тяжести и длины маятника

Для n=3:

![]()
 x2,0=0;
x1,0=0
x2,0=0;
x1,0=0
-
b>0
-
b<0
-
b=0

b>0 → устойчива
b<0 → неустойчива
b=0 →
мнимый
корень
![]() → ответ
неясен
→ ответ
неясен
II метод Ляпунова.
Т/1
Если
![]() дифференцируемая функция v(xi)
i=1…n,
называемая функцией Ляпунова и
удовлетворяющая в окрестности начала
координат условиям:
дифференцируемая функция v(xi)
i=1…n,
называемая функцией Ляпунова и
удовлетворяющая в окрестности начала
координат условиям:
-
v(xi) ≥ 0, v(xi)=0 при xi=0 i=1..n
-
 , при t>t0
в силу
уравнения (*),
, при t>t0
в силу
уравнения (*),
то точка покоя xi =0 i=1..n системы устойчива.

Не выходим за
пределы
![]() .
.
Т/2
Если
![]() дифф. Функция Ляпунова v(xi)
i=1…n,
удовлетворяющая условиям
дифф. Функция Ляпунова v(xi)
i=1…n,
удовлетворяющая условиям
-
v(xi)=0 при xi=0 (v(xi)>0, если xi≠0) i=1…n
-
 в поле сколь угодно
малой окружности начала координат
в поле сколь угодно
малой окружности начала координат
![]() <0,
где
<0,
где
![]() - const,
- const,
то точка покоя xi=0 i=1…n системы асимптотически устойчива.
Пр/4



![]() ±
±![]() ответ неясен
ответ неясен
v=3x12+4x22
v(x1, x2)≥0
v(0, 0)=0
![]()
 <0
<0
Значит, (0,0) – асимптотически устойчива (по Т2)
Пр/5

![]()
1)
![]()
2)

![]() <0
<0
![]() точка
покоя асимптотически устойчива
точка
покоя асимптотически устойчива
Если для некоторой функции v условия теорем не выполнены, то это не означает, что система не устойчива, т.к. может быть неправильно выбрана сама функция v.
Если исследуемая
система
![]() подвержена малым возмущениям
(кратковременным), то её можно заменить
возмущённой системой на интервале вида
подвержена малым возмущениям
(кратковременным), то её можно заменить
возмущённой системой на интервале вида
![]()
![]() и
и
![]() мало, а при t>t1
возвращаемся к прежней системе.
мало, а при t>t1
возвращаемся к прежней системе.
При асимптотической устойчивости поле траекторий стремится к нулю.
При нелинейных членах или погрешностях (например, машинные округления.) траектории смещаются, и если при t→∞ эти траектории стремятся к 0, то в начале координат возникает устойчивый или неустойчивый фокус.

 --фокус
--фокус
Практически все задачи строительной механики можно представить следующим образом:
Пусть имеется
некое внешнее воздействие
![]() и поведение системы
и поведение системы
![]() .
Математическая природа элементов обоих
пространств может быть произвольной
(числа, функции, векторы, тензоры –
обобщение матриц..). Структура и свойства
системы характеризуются оператором Н
таким образом, что u=H*q.
.
Математическая природа элементов обоих
пространств может быть произвольной
(числа, функции, векторы, тензоры –
обобщение матриц..). Структура и свойства
системы характеризуются оператором Н
таким образом, что u=H*q.
q – воздействия (ветер, землетрясение…)
u – перемещение, напряжение, деформация
H – теория упругости, пластичности, механики твёрдого тела, динамики, а также граничные и начальные условия
Систему можно изобразить и так: L*u=q


 u L
q
u L
q

P

q
 H u P
– возмущения
H u P
– возмущения
Модель «Сила - перемещение»
Иногда оператор М может зависеть от параметра λ (напр. время), тогда система выглядит так:
 P т.е.
мы имеем обратную связь, поэтому эта
система
P т.е.
мы имеем обратную связь, поэтому эта
система
 автоматического
управнения
автоматического
управнения
q


 H u
H u


 L
λ
L
λ
L*u=q.
Введем некоторое пространство V
для описания качества системы. Время t
Є Т может играть роль параметра. При
изменении t одно состояние
системы переходит в другое, т.е. u=u(t).
последовательность изменения состояний,
или эволюция состояний u(t),
представляется виде некоторых траекторий.
Каждой траектории u=u(t)
соответствует траектория v(t)
Є V в пространстве качества.
Связь между ними можно описать оператором
М. V=M*u.
множество состояний системы, допустимых
с точки зрения качества, образуют в
пространстве V область
допустимых состояний Ώo. Граница Г
области допустимых состояний соответствует
предельным состояниям. Если V
Є Ώo, то параметры качества сохраняются
в установленных пределах. Пересечение
границы Г траекторией v(t)
соответствует отказу системы (напр.
потеря устойчивости, превышение заданной
с тоимости).
Если система q Є Q
дискретна, то Q, V,
U – евклидовы пространства.
тоимости).
Если система q Є Q
дискретна, то Q, V,
U – евклидовы пространства.