

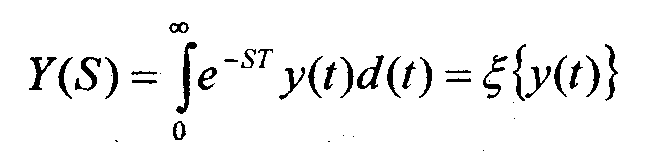
8. Определение передаточной функции.
![]() ....
при
....
при![]() а
с помощью прямого преобразования Лапласа
приводят к изображениям функций
а
с помощью прямого преобразования Лапласа
приводят к изображениям функций
![]() которые
записывают прописными буквами в виде
которые
записывают прописными буквами в виде
где![]() —
символ
прямого преобразования Лапласа;
—
символ
прямого преобразования Лапласа;![]() —
оператор. Наряду с прямым преобразованием
Лапласа в теории автоматического
регулирования применяют и обратное
преобразование Лапласа.
—
оператор. Наряду с прямым преобразованием
Лапласа в теории автоматического
регулирования применяют и обратное
преобразование Лапласа.
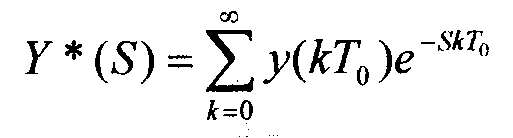
Разностные
уравнения записывают в виде
последовательности дискретных
сигналов![]() или
с помощью такта квантования
или
с помощью такта квантования![]() в
виде
в
виде![]() Если
применить к этим переменным прямое
дискретное преобразование Лапласа,
тогда для
Если
применить к этим переменным прямое
дискретное преобразование Лапласа,
тогда для
![]() имеем
имеем
При
практическом применении преобразований
Лапласа операции ведут не над заданными
функциями, а над их изображениями. Для
получения изображений необходимо
пользоваться некоторыми правилами
отображения (свойствами
![]() -преобразования).
С помощью преобразования Лапласа можно
получать ПФ по линейным диф. уравнениям,
описывающим динамические процессы в
стационарных и нестационарных элементах
(объектах). В стационарных
элементах коэф-ты явл-ся постоянными,
поэтому ПФ постоянна и ее параметры не
зависят от времени. В нестационарных
элементах коэф-ты меняются от времени
и ПФ представляет собой сумму членов
ряда, каждый из к-ых опред-ется характером
изменения как самого параметра от
времени, так и его производных.
-преобразования).
С помощью преобразования Лапласа можно
получать ПФ по линейным диф. уравнениям,
описывающим динамические процессы в
стационарных и нестационарных элементах
(объектах). В стационарных
элементах коэф-ты явл-ся постоянными,
поэтому ПФ постоянна и ее параметры не
зависят от времени. В нестационарных
элементах коэф-ты меняются от времени
и ПФ представляет собой сумму членов
ряда, каждый из к-ых опред-ется характером
изменения как самого параметра от
времени, так и его производных.
9. Критерий устойчивости Михайлова, кривая Михайлова.
При
изменении
![]() вектор
вектор![]() будет своим концом перемещаться по
кривой и поворачиваться на некоторый
угол. При значении
будет своим концом перемещаться по
кривой и поворачиваться на некоторый
угол. При значении![]() этот
угол должен быть равен углу
этот
угол должен быть равен углу![]() Кривую геометрического места точек
концов вектора называют кривой Михайлова
или годографом Михайлова.
Кривую геометрического места точек
концов вектора называют кривой Михайлова
или годографом Михайлова.
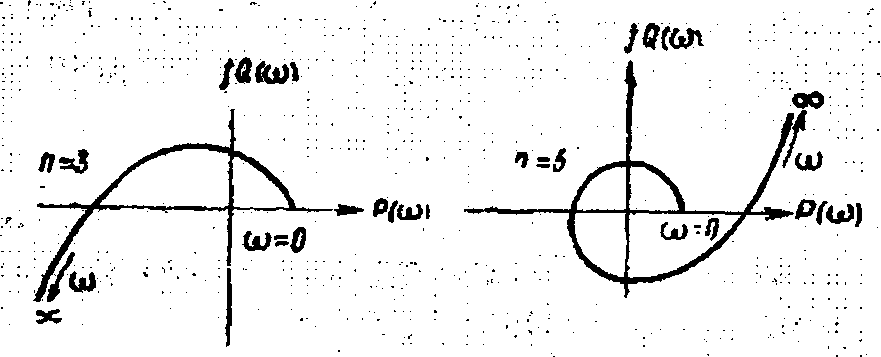 Критерий
устойчивости, сформулированный А. В.
Михайловым: Система автоматического
регулирования будет устойчивой,
если при изменении
Критерий
устойчивости, сформулированный А. В.
Михайловым: Система автоматического
регулирования будет устойчивой,
если при изменении
![]() от
0 до
от
0 до![]() вектор
вектор![]() совершит
поворот в положительном направлении
на угол, равный
совершит
поворот в положительном направлении
на угол, равный![]() где
где![]() —степень
характеристического уравнения. Для
устойчивой системы при изменении
—степень
характеристического уравнения. Для
устойчивой системы при изменении![]() общее
число точек пересечения кривой с осями
координат
общее
число точек пересечения кривой с осями
координат![]()
![]() равно
порядку характеристического уравнения,
причем вещественная и мнимая оси
пересекаются поочередно. Первой точкой
пересечения будет во всех случаях точка,
лежащая на положительной вещественной
оси. Она получается при значении
равно
порядку характеристического уравнения,
причем вещественная и мнимая оси
пересекаются поочередно. Первой точкой
пересечения будет во всех случаях точка,
лежащая на положительной вещественной
оси. Она получается при значении![]() когда
в выражении
когда
в выражении![]() остается
только свободный член. Последняя точка
пересечения будет для характеристического
уравнения четной степени лежать на
мнимой оси, а для уравнения нечетной
степени —на вещественной оси. В точках
пересечения кривой Михайлова с
вещественной осью мнимая часть
остается
только свободный член. Последняя точка
пересечения будет для характеристического
уравнения четной степени лежать на
мнимой оси, а для уравнения нечетной
степени —на вещественной оси. В точках
пересечения кривой Михайлова с
вещественной осью мнимая часть![]() обращается
в нуль, и, наоборот, в дочках пересечения
кривой с мнимой осью вещественная часть
обращается
в нуль, и, наоборот, в дочках пересечения
кривой с мнимой осью вещественная часть![]() обращается
в нуль. Поэтому значения
обращается
в нуль. Поэтому значения![]() при
которых пересекается кривая с вещественной
или мнимой осью, должны являться корнями
уравнений:
при
которых пересекается кривая с вещественной
или мнимой осью, должны являться корнями
уравнений:![]() Функции
Функции![]() можно
представить графически. Точки пересечения
кривых с осью абсцисс дают значения
корней уравнения. Для устойчивости
системы необходимым условием являются
вещественность и перемежаемость корней
уравнений.
можно
представить графически. Точки пересечения
кривых с осью абсцисс дают значения
корней уравнения. Для устойчивости
системы необходимым условием являются
вещественность и перемежаемость корней
уравнений.