

5. Построение логарифмической характеристики кор- ректирующего устройства по лачх исходной системы и желаемой лачх.
Если в САР имеется последовательное корректирующее устройство, то ее желаемую передаточную функцию можно представить в следующем виде:
![]()
откуда
при![]() имеем
логарифмические амплитудную
имеем
логарифмические амплитудную![]() и
фазовую
и
фазовую![]()
![]() частотные
характеристики. Подняв неизменяемую
логарифмическую амплитудную характеристику
до уровня желаемой и построив фазовую
частотную характеристику
частотные
характеристики. Подняв неизменяемую
логарифмическую амплитудную характеристику
до уровня желаемой и построив фазовую
частотную характеристику![]() определим
запасы устойчивости системы по фазе и
модулю. Если они соответствуют требованиям
технических условий, то, получим
логарифмическую амплитудную характеристику
последовательного корректирующего
устройства. .
определим
запасы устойчивости системы по фазе и
модулю. Если они соответствуют требованиям
технических условий, то, получим
логарифмическую амплитудную характеристику
последовательного корректирующего
устройства. .
Рассмотрим синтез САР с параллельным корректирующим устройством. Запишем передаточную функцию системы в. виде

При
условии, что![]() 1имеем
1имеем![]() или
или
![]() —желаемая
логарифмическая ампли-
тудная
характеристика синтезируемой системы.
—желаемая
логарифмическая ампли-
тудная
характеристика синтезируемой системы.
Для
обеспечения требуемого порядка астатизма
проектируемой
системы необходимо,
чтобы порядок нуля передаточной функции
![]() был
не ниже порядка полюса
был
не ниже порядка полюса![]()
6. Показатели качества управления, их определение по переходным и ач характеристикам системы.
Качество
переходных процессов численно
характеризуется следующими показателями
качества.
Время
переходного процесса![]() Оно
характеризует быстродействие системы
и определяется как интервал времени от
начала переходного процесса до момента,
когда отклонение выходной величины от
ее нового установившегося значения
становится меньше определенной достаточно
малой величины. Обычно в качестве
последней берут 5% максимального
отклонения в переходный период или 5%
от нового установившегося значения.
Максимальное
отклонение в переходный период. В
случае переходных процессов, вызванных
возмущением, максимальное отклонение
определяется величиной
Оно
характеризует быстродействие системы
и определяется как интервал времени от
начала переходного процесса до момента,
когда отклонение выходной величины от
ее нового установившегося значения
становится меньше определенной достаточно
малой величины. Обычно в качестве
последней берут 5% максимального
отклонения в переходный период или 5%
от нового установившегося значения.
Максимальное
отклонение в переходный период. В
случае переходных процессов, вызванных
возмущением, максимальное отклонение
определяется величиной![]() ,
приходящейся на единицу возмущения
,
приходящейся на единицу возмущения![]()
![]() Величина
часто называется перерегулированием
Величина
часто называется перерегулированием
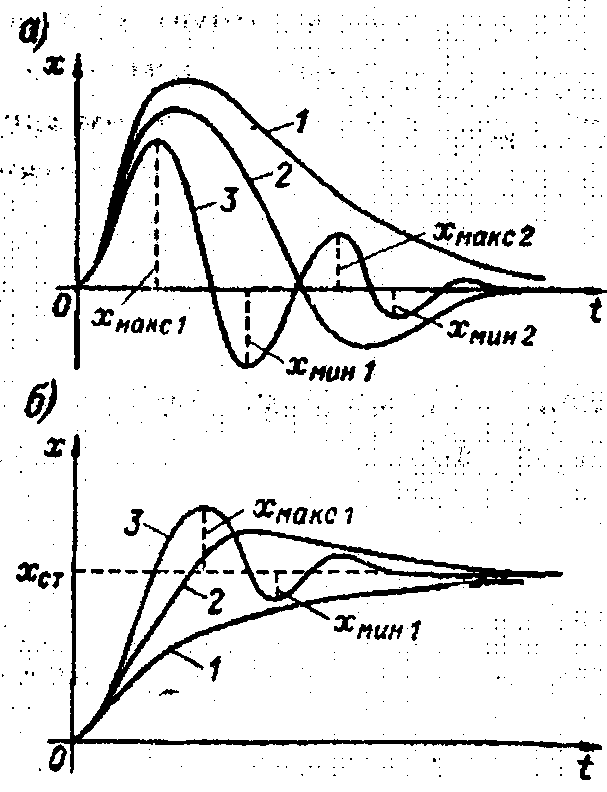 Колебательность
переходного процесса.
Эта
характеристика переходного процесса
обычно определяется числом колебаний,
равным числу минимумов кривой переходного
процесса в интервале времени tm—числом
перерегулирований за этот же интервал.
Часто колебательность переходного
процесса оценивают отношением соседних
максимумов xmax2/xmax1.
Эта величина так и называется
колебательностью и выражается в
процентах. Незатухающие колебания при
этом соответствуют колебательности
100%. Исчерпывающее представление о
качестве переходных процессов дает,
естественно, сама кривая процесса x(t)
Однако при синтезе систем необходимо
иметь возможность судить об основных
показателях качества переходных
процессов в системе без построения их
кривых, по каким-либо косвенным признакам,
которые определяются более просто, чем
кривая x(t),
и, кроме того, позволяют связать показатели
качества непосредственно со значениями
параметров системы. Такие косвенные
признаки разработаны и называются
критериями качества переходных процессов.
Для минимально-фазовых систем качество
переходных процессов может быть оценено
по одной амплитудной характеристике
замкнутой системы A3.
Колебательность определяется по величине
относительного максимума характеристики,
который поэтому называется показателем
колебательности:
Колебательность
переходного процесса.
Эта
характеристика переходного процесса
обычно определяется числом колебаний,
равным числу минимумов кривой переходного
процесса в интервале времени tm—числом
перерегулирований за этот же интервал.
Часто колебательность переходного
процесса оценивают отношением соседних
максимумов xmax2/xmax1.
Эта величина так и называется
колебательностью и выражается в
процентах. Незатухающие колебания при
этом соответствуют колебательности
100%. Исчерпывающее представление о
качестве переходных процессов дает,
естественно, сама кривая процесса x(t)
Однако при синтезе систем необходимо
иметь возможность судить об основных
показателях качества переходных
процессов в системе без построения их
кривых, по каким-либо косвенным признакам,
которые определяются более просто, чем
кривая x(t),
и, кроме того, позволяют связать показатели
качества непосредственно со значениями
параметров системы. Такие косвенные
признаки разработаны и называются
критериями качества переходных процессов.
Для минимально-фазовых систем качество
переходных процессов может быть оценено
по одной амплитудной характеристике
замкнутой системы A3.
Колебательность определяется по величине
относительного максимума характеристики,
который поэтому называется показателем
колебательности:
![]() При
M<1
переходная
характеристика системы неколебательна.
При
M<1
переходная
характеристика системы неколебательна.
Чем больше М, тем больше колебательность. ПриM>∞ колебательность возрастает до получения незатухающих колебаний, соответствующих нахождению системы на границе устойчивости.
Д лительностьtn
переходной
характеристики определяется шириной
частотной характеристики A3(ω).
При
этом зависимость здесь такая: чем шире
частотная характеристика системы, тем
короче ее переходная (временная)
характеристика, т. е. тем меньше tn
В
первом приближении длительность
переходной характеристики может быть
оценена по величине резонансной частоты
ω
(p).
Так как частота колебаний переходной
характеристики примерно равна ωp,
время
tmaxдостижения
первого максимума переходной
характеристикой близко половине периода
колебаний этой частоты
лительностьtn
переходной
характеристики определяется шириной
частотной характеристики A3(ω).
При
этом зависимость здесь такая: чем шире
частотная характеристика системы, тем
короче ее переходная (временная)
характеристика, т. е. тем меньше tn
В
первом приближении длительность
переходной характеристики может быть
оценена по величине резонансной частоты
ω
(p).
Так как частота колебаний переходной
характеристики примерно равна ωp,
время
tmaxдостижения
первого максимума переходной
характеристикой близко половине периода
колебаний этой частоты
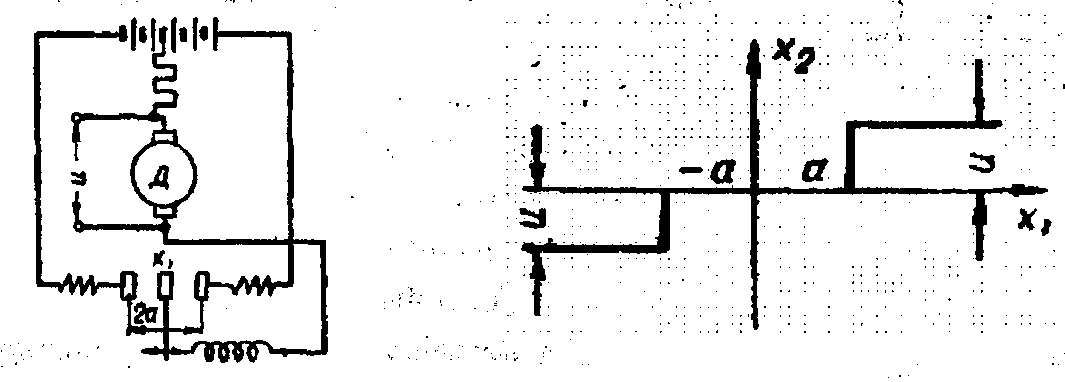
7. Типовые нелинейные звенья систем управления, их графические характеристики.
Зоны
нечувствительности характеристик
различных элементов систем регулирования
можно объяснить различными причинами,
зависящими от конструктивного выполнения
данного устройства, типа его и т. д. Схема
управления электродвигателем при помощи
реле. - Нелинейная характеристика с
зоной нечувствительности. При отклонении
контакта больше чем на а (т.е., если![]() )
на зажимы двигателя подается постоянное
напряжение
)
на зажимы двигателя подается постоянное
напряжение![]() Характеристика
схемы, которая может быть записана так:
Характеристика
схемы, которая может быть записана так: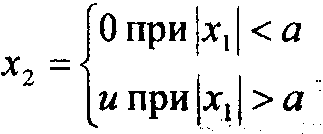
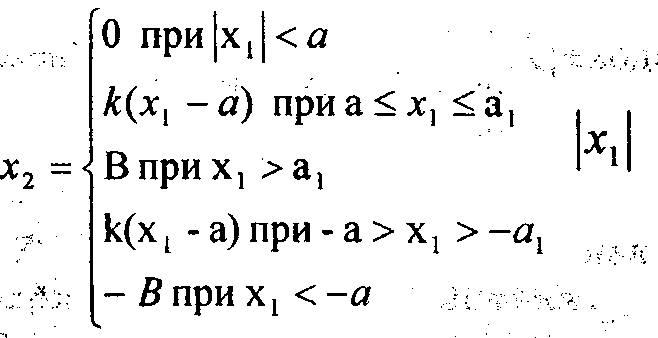
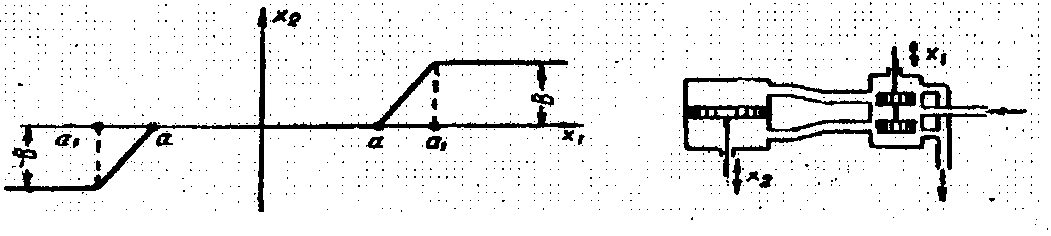
![]() от
нуля до а выходная величина остается
равной нулю. При
от
нуля до а выходная величина остается
равной нулю. При![]() При
уменьшении
При
уменьшении![]() до
значения
до
значения![]() остается
постоянным и равным В. При
остается
постоянным и равным В. При![]() —
—![]()
