

3. Назначение и виды коррекции динамических свойств сау.
Коррекция динамических свойств САУ осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов.
С точки зрения требований к точности САУ в установившихся режимах коррекция динамических свойств САУ может понадобиться для увеличения коэффициента передачи или порядка астатизма при сохранении устойчивости и определенного качества переходных процессов. Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно по способу включения в систему корректирующие звенья делятся на последовательные корректирующие звенья и параллельные.
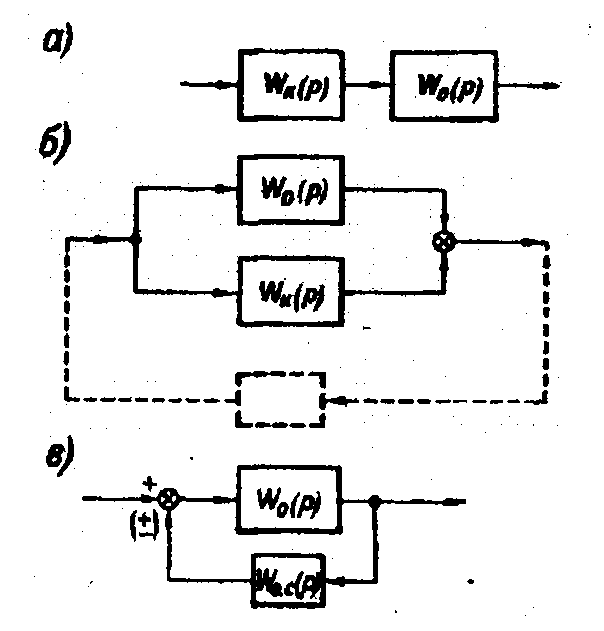
На рисунке, а показано включение последовательного корректирующего звена, бив приведены два возможных способа включения параллельных корректирующих звеньев.
Действие корректирующих звеньев сводится к следующему:
введение в контур САУ воздействий по производным и интегралам;
введение корректирующих обратных связей вокруг отдельных частей системы;
введение корректирующих воздействий в функции внешних воздействий и их производных.
Дополнительные воздействия по производным и интегралам в контуре САУ или в функции внешних воздействий и их производных осуществляются с помощью последовательных корректирующих звеньев, корректирующие обратные связи — с помощью параллельных корректирующих звеньев.
4. Фазовый портрет нелинейной системы управления. Анализ поведения системы по фазовому портрету.
Для
получения достаточно полного представления
о характере возможных движений системы
без непосредственного интегрирования
ее дифференциальных уравнений весьма
плодотворным является изучение
многообразия фазовых траекторий и
особых точек равновесия в фазовом
пространстве системы. Уравнение
автономной системы второго порядка
может быть представлено в виде
![]() ,
где φ — известная функция выходной
переменной и ее производной, в общем
случае нелинейная. Полагая
,
где φ — известная функция выходной
переменной и ее производной, в общем
случае нелинейная. Полагая![]() приведем
уравнение к системе двух уравнений
первого порядка:
приведем
уравнение к системе двух уравнений
первого порядка:
![]()
Фазовыми
координатами системы являются ее
выходная переменная y
и скорость ее изменения
![]() Разделив
уравнения одно на другое, получим
дифференциальное уравнение фазовых
траекторий:
Разделив
уравнения одно на другое, получим
дифференциальное уравнение фазовых
траекторий:
![]() .
Это уравнение однозначно определяет
касательную к фазовой траектории во
всех точках, кроме тех, в которых
одновременно выполняются равенства
.
Это уравнение однозначно определяет
касательную к фазовой траектории во
всех точках, кроме тех, в которых
одновременно выполняются равенства
![]() В
этих точках не существует определенного
направления касательной к траектории.
Точки такого типа называютсяособыми.
Из
этих точек могут исходить многие
траектории. Через каждую точку фазовой
плоскости проходит только одна фазовая
траектория. Особые точки являются
точками
равновесия
системы.
Для выяснения поведения системы при
малых отклонениях от состояния равновесия
пользуются
методом линеаризации уравнений,
предполагая, что функция
В
этих точках не существует определенного
направления касательной к траектории.
Точки такого типа называютсяособыми.
Из
этих точек могут исходить многие
траектории. Через каждую точку фазовой
плоскости проходит только одна фазовая
траектория. Особые точки являются
точками
равновесия
системы.
Для выяснения поведения системы при
малых отклонениях от состояния равновесия
пользуются
методом линеаризации уравнений,
предполагая, что функция
![]() имеет
непрерывные первые производные поу
и
z.
Пусть y0,z0=0
—
координаты особой точки, т. е. какое-нибудь
решение уравнений. Полагая
имеет
непрерывные первые производные поу
и
z.
Пусть y0,z0=0
—
координаты особой точки, т. е. какое-нибудь
решение уравнений. Полагая![]() и
учитывая малость величин η,ξ, можем
написать:
и
учитывая малость величин η,ξ, можем
написать:
![]()
где a, b — постоянные коэффициенты, определяемые формулами а
![]() малая
величина высшего порядка по сравнению
с η и ξ,
малая
величина высшего порядка по сравнению
с η и ξ,
Получим
систему линейных уравнений первого
приближения:
![]() ,
решая эти уравнения первого приближения,
можно определить движение соответствующей
линейной системы и ее фазовые траектории
вблизи особой точки и оценить устойчивость
соответствующего положения равновесия.
,
решая эти уравнения первого приближения,
можно определить движение соответствующей
линейной системы и ее фазовые траектории
вблизи особой точки и оценить устойчивость
соответствующего положения равновесия.
Системе
уравнений соответствует характеристическое
уравнение
![]()
Корни
этого уравнения полностью определяют
поведение системы около положения
равновесия, а следовательно, и характер
особой точки![]()
Случай
комплексных сопряженных корней
![]()
Решение уравнений имеет вид колебаний:
![]()
Г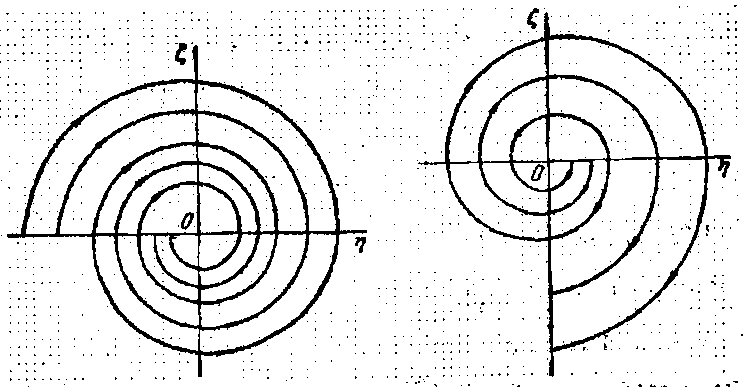 деm,ψ—
постоянные интегрирования, определяемые
начальными условиями. При увеличении
t
на период
деm,ψ—
постоянные интегрирования, определяемые
начальными условиями. При увеличении
t
на период![]() обе
координаты пропорционально убывают
при h<0и
возрастают при h>0.
Изображающая
точка стремится к началу координат
при
обе
координаты пропорционально убывают
при h<0и
возрастают при h>0.
Изображающая
точка стремится к началу координат
при![]() если
если![]() Изображающая
точка удаляется от начала координат
при
Изображающая
точка удаляется от начала координат
при![]() При
различных н.у. движение будет происходить
по различным спиралям. Особая точка
такого типа называется фокусом.
При
При
различных н.у. движение будет происходить
по различным спиралям. Особая точка
такого типа называется фокусом.
При![]() это
будет устойчивый фокус, соответствующий
устойчивому положению равновесия
системы, а при
это
будет устойчивый фокус, соответствующий
устойчивому положению равновесия
системы, а при![]() —
неустойчивый фокус, соответствующий
неустойчивому положению равновесия
системы.
—
неустойчивый фокус, соответствующий
неустойчивому положению равновесия
системы.