

Частотные характеристики динамических звеньев и систем
Если на вход звена (системы) подать
гармоническое воздействие
![]() ,
то после окончания переходных процессов
на выходе устанавливаются колебания
,
то после окончания переходных процессов
на выходе устанавливаются колебания![]() той
же частоты, но иной амплитуды и сдвинутые
по фазе относительно входных колебаний.
той
же частоты, но иной амплитуды и сдвинутые
по фазе относительно входных колебаний.
Амплитуда и фаза выходных колебаний при прочих равных условиях зависят от частоты и могут служить мерой динамических свойств.
![]()

![]()
![]()
 – амплитудно-фазовая характеристика
есть отношение выходной величины к
входной величине выраженной в комплексной
форме.
– амплитудно-фазовая характеристика
есть отношение выходной величины к
входной величине выраженной в комплексной
форме.
![]() – АЧХ
– АЧХ
![]() –
функция частоты – ФЧХ
–
функция частоты – ФЧХ
АФХ может быть получена из выражения передаточной функции W(p) заменой комплексной переменнойрна мнимую переменнуюjw:
АФХ строится на комплексной плоскости в координатах вещественная составляющая по оси х; мнимая составляющая по оси у, при изменении частоты от 0 до ∞.
 В
В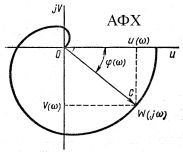 современной практике нашли применение
частотные характеристики в логарифмической
форме, а именно логарифм АЧХ.
современной практике нашли применение
частотные характеристики в логарифмической
форме, а именно логарифм АЧХ.
По оси абсцисс этих характеристик откладывается частота в логарифмическом масштабе, причем часто у этой шкалы расставляются значения не lgω, аω.
Отрезок шкалы частот соответствующий 10-и кратному изменению частоты называется декадой. По оси ординат ЛФЧХ откладываются значения фазовых углов в натуральном масштабе в 0С, или радианах.
В оси ординат ЛАЧХ откладываются значения модуля АФХ в логарифмическом масштабе в децибелах (L(w)).
L(ω)=20lgW(ω);K=lg(Рвых/Рвх);lg(Рвых/Рвх)=lg(A2вых/A2вх)=2lg(Aвых/Aвх)=2lgW(ω)
20lgW(w)=дБ;K=10> 20 дб ;K=100> 40 дб ;K=1000> 60 дб
9. Алгоритмические схемы сау. Передаточные функции типовых соединений звеньев. Эквивалентные преобразования алгоритмических схем
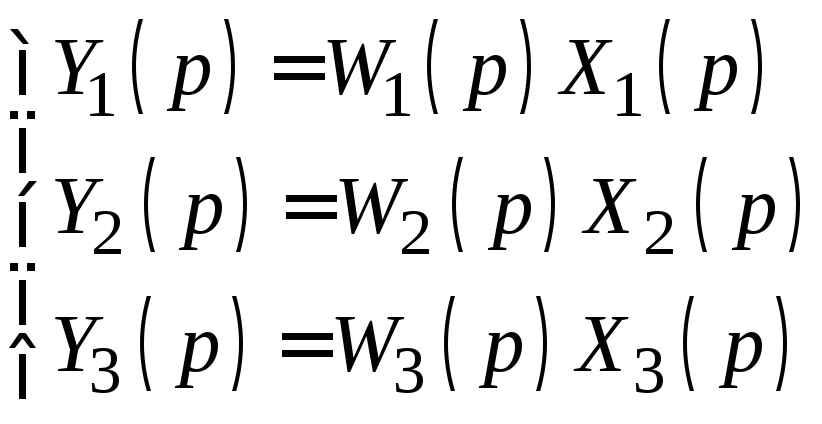
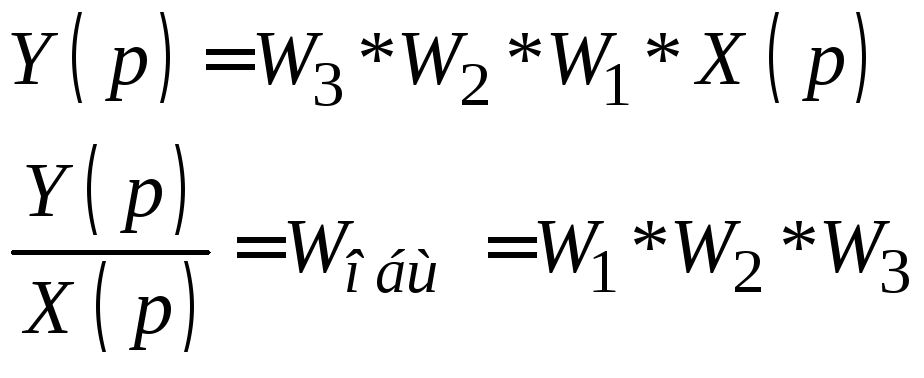
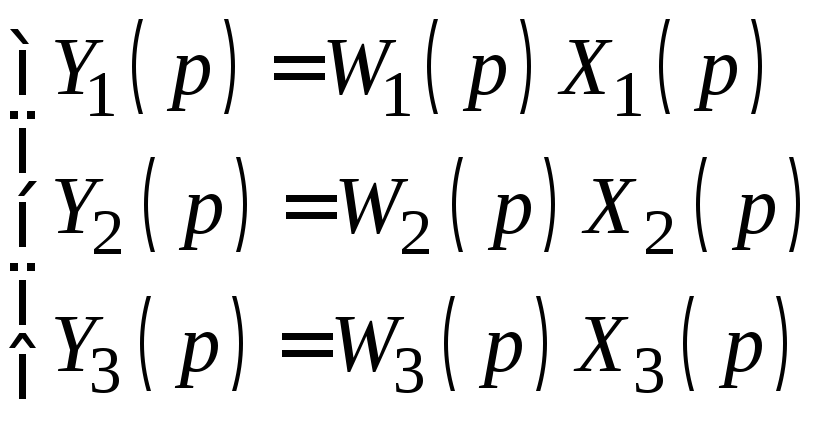
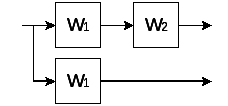
1. Последовательное соединение динамических звеньев.
![]()
2. Параллельное соединение динамических звеньев.

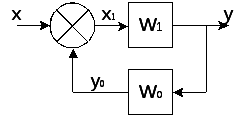
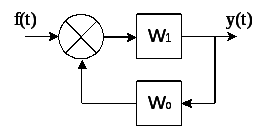
3. Встречно – параллельное соединение (охват звена обратной связи).
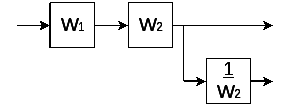
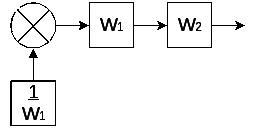
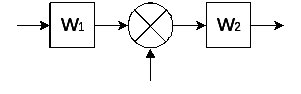
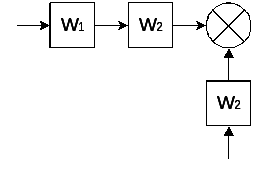
4. Правила переноса точки съема сигнала и сумматора.
|
|
|
|
|
|
|
|

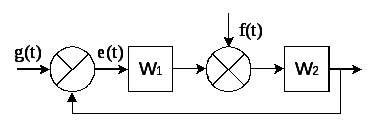
10. Передаточная функция разомкнутой САУ, передаточная функция замкнутой САУ относительно задающего воздействия, относительно возмущающего воздействия и для ошибки регулирования. Характеристические уравнения систем
Типовая структура замкнутой САУ, передаточная функция и характеристическое уравнение разомкнутой системы.
![]() – передаточная функция разомкнутой
системы.
– передаточная функция разомкнутой
системы.
Для линейных систем применим принцип суперпозиции воздействий (независимых воздействий).
![]() - Передаточная функция замкнутой системы
относительно регулирующей величины по
задающему воздействию.
- Передаточная функция замкнутой системы
относительно регулирующей величины по
задающему воздействию.
![]() – передаточная функция замкнутой
системы относительно задающей величины
по возмущающему воздействию.
– передаточная функция замкнутой
системы относительно задающей величины
по возмущающему воздействию.
![]() – передаточная функция замкнутой
системы относительно ошибки регулирования,
по задающему воздействию.
– передаточная функция замкнутой
системы относительно ошибки регулирования,
по задающему воздействию.
![]() – передаточная функция замкнутой
системы относительно ошибки регулирования,
по возмущающему воздействию.
– передаточная функция замкнутой
системы относительно ошибки регулирования,
по возмущающему воздействию.
![]() – передаточная функция разомкнутой
системы
– передаточная функция разомкнутой
системы

![]() –
Характеристическое уравнение разомкнутой
системы получается приравниванием к
нулю знаменателя передаточной функции
разомкнутой системы.
–
Характеристическое уравнение разомкнутой
системы получается приравниванием к
нулю знаменателя передаточной функции
разомкнутой системы.
Для нахождения характеристического уравнения замкнутой системы необходимо также приравнять к нулю знаменатель передаточной функции замкнутой системы
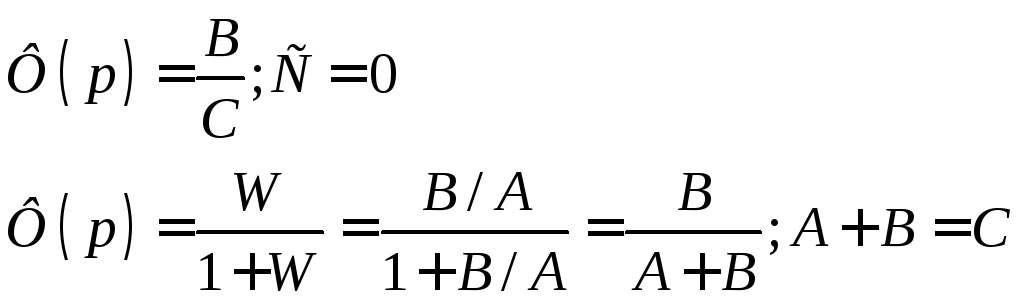
Характеристическое уравнение замкнутой системы может быть получено приравниванием к 0 суммы числителя и знаменателя передаточной функции разомкнутой системы.
11. Типовые динамические звенья и их характеристики (безынерционное, инерционное, интегрирующее, дифференцирующее, колебательное, форсирующее). Реальные интегрирующее и дифференцирующее звенья. Интегро-дифференцирующие и изодромные звенья.
T– Постоянная времени. Физический смысл – это время, в течение которого выходная величина достигала бы своего установившегося значения, если бы оно изменялось с постоянной скоростью равной скорости в начальный момент времени.
К – коэффициент усиления.