28. Реализация корректирующих устройств. Пассивные и активные четырехполюсники постоянного тока, дифференцирующий трансформатор, тахогенератор постоянного тока.
В качестве КУ находят применение:
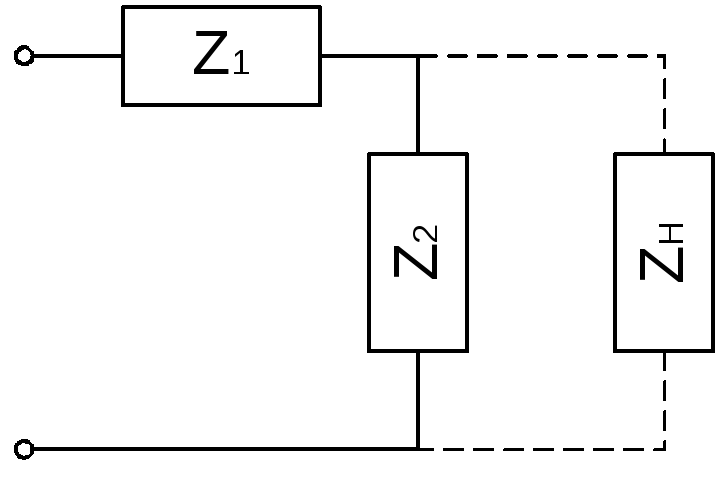
1) Пассивные четырехполюсники постоянного тока, выполненные на RLC компонентах
![]()
 при
при![]()
![]()
Достоинства: простота реализации, стандартные элементы.
Недостатки: ослабление сигнала
2) Активные четырехполюсники постоянного тока, на базе операционного усилителя, охваченного обратной отрицательной связью по напряжению
![]()
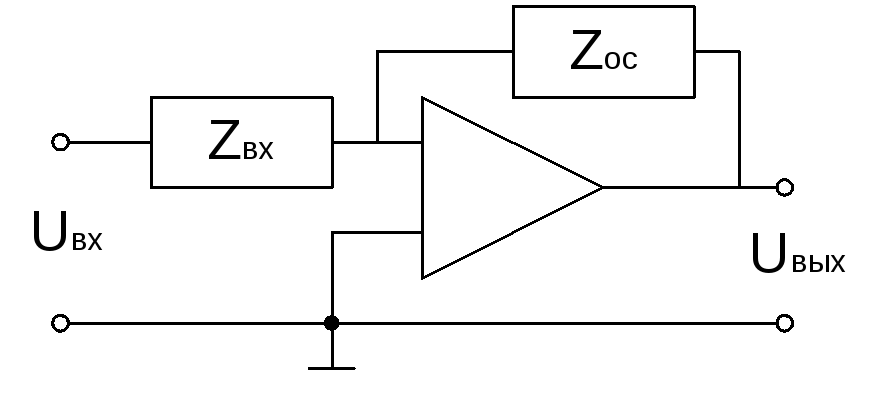
Достоинства: возможность одновременного усиления сигнала.
Недостатки: сложность конструкции, необходимость наличия дополнительных источников питания.
3) Дифференцирующий трансформатор
Трансформатор малой мощности предназначенный для дифференцирования сигнала малой мощности постоянного тока.
Е сли
сли![]() и
пренебрежем рассеянием мощности, то
и
пренебрежем рассеянием мощности, то![]()
![]()
![]()
![]()
В случае если диф трансформатор
работает с конечным сопротивлением
![]() ,
то
,
то
![]()
![]()
![]()
Диф трансформатор выполняет одновременную роль гальванической развязки между цепями входного и выходного сигналов.
4) Тахогенератор
Тахогенератор постоянного тока представляет собой маломощный генератор постоянного тока с независимым возбуждением или с возбуждением от магнитов.
При ХХ:
![]()
![]()
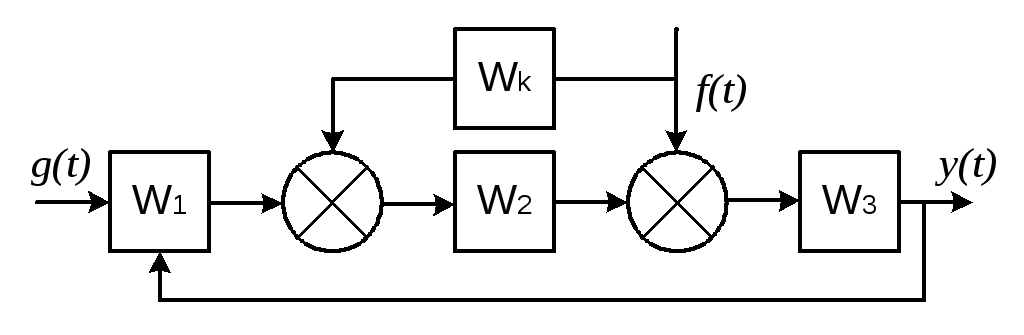
29. Комбинированное регулирование. Инвариантные системы.
К системам комбинированного управления относятся системы, в которых используется принцип регулирования по отклонению (принцип ОС) и принцип регулирования по возмущению.
Использование этих двух принципов позволяет создавать системы инвариантные по отношению к внешним воздействиям.
Различают абсолютную, полную и частичную инвариантность
Схема компенсации возмущающего воздействия
![]()
![]()
![]()
![]()
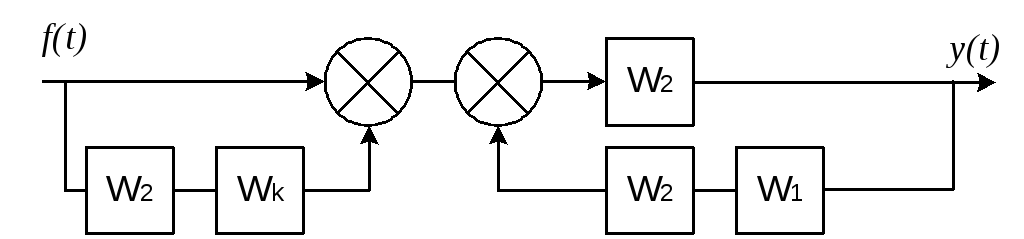
Схема компенсации задающего воздействия

![]()
![]()
![]()
![]()
![]() –
лажа хз почему.
–
лажа хз почему.
![]()
![]() –условие компенсации
–условие компенсации
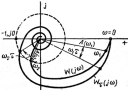
30. Системы автоматического управления с запаздыванием. Запаздывающее звено и его характеристики. Особенности оценки устойчивости систем с запаздыванием
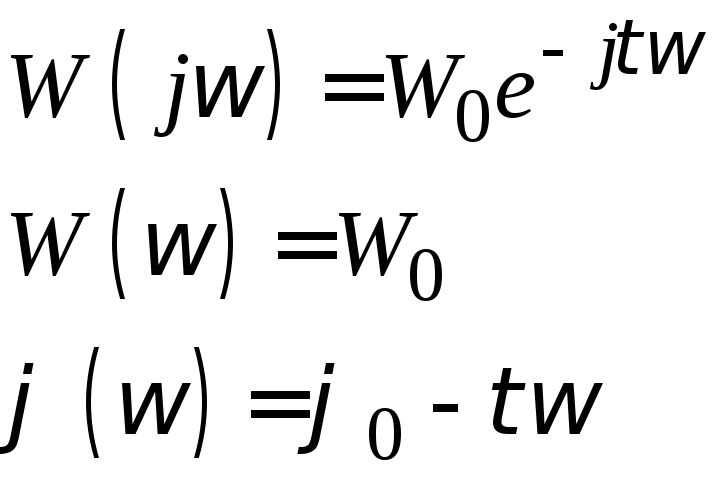
Существуют динамические звенья системы, у которых реакция на входное воздействие отстает по времени, на некоторую величину τ
![]()
 – уравнение запаздывающего звена
(звено чистого запаздывания)
– уравнение запаздывающего звена
(звено чистого запаздывания)
Любую систему автоматического управления с запаздывающем звеном можно представить в виде соединения запаздывающего звена и линейных динамических звеньев.
![]()
![]() τ – время чистого запаздывания
τ – время чистого запаздывания

![]()
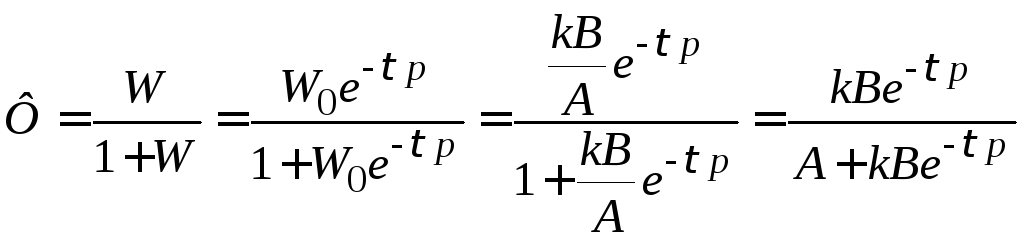
Звено чистого запаздывания может привести к потере устойчивости системы (критерий Найквиста)