

1. Теория управления. Основные понятия и определения. Основные задачи теории автоматического управления.
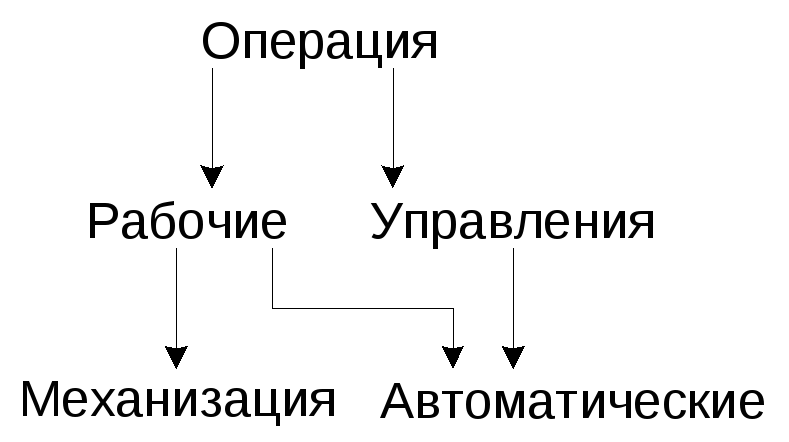
Операция:
Рабочая операция (необходимые для выполнения процесса. Пример: снятие стружки при обработке детали на станке)
Операция управления(обеспечивают в нужные моменты времени начало, порядок следования и прекращение отдельных операций). Совокупность управляющих операций образует процесс управления
Механизация – замена труда человека в рабочих операциях
Автоматизация –замена труда человека в операциях управления
Автоматические устройства –технические устройства, выполняющие операции управления.
Объект управления – совокупность технических средств выполняющих данный процесс
Система управления – совокупность средств управления
Автоматическая система –система, в которой все рабочие и управляющие операции выполняют автоматические устройства
Автоматизированная (частично автоматическая) система – система в которой автоматизировании только часть операций, другая часть операций остается за людьми
Объект:
Статический (безынерционный) –
Динамический – объект обладает инерцией, зависимость дифференциальная, интегральная, разностная
2. Основные принципы регулирования. Регулирование по разомкнутому циклу. Регулирование по возмущению. Регулирование по отклонению (по ошибке). Обратная связь.
В основе построения системы автоматического управления лежат некоторые общие фундаментальные принципы управления, определяющие, каким образом осуществляется увязка алгоритмов функционирования и управления с фактическим функционированием или причинами, вызывающими отклонение функционирования от заданного. В настоящее время в технике известны и используют три фундаментальных принципа: разомкнутого управления, компенсации и обратной связи.
1. Принцип разомкнутого управления
используется на вспомогат. операц. (закрыт - открыт)
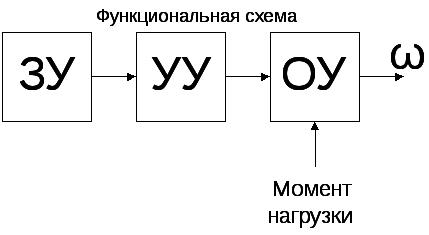
Работу систем автоматического управления можно описывать с помощью функциональных схем, которые показывают из каких элементов состоит система и как эти элементы связаны между собой.
Под функциональным элементом понимается конструктивно обособленная часть системы выполняющая определенные функции: измерения, усиления, сравнения, преобразования.
Недостаток: невысокая точность системы управления – отсутствие информации о действительном значении управляемой величины.
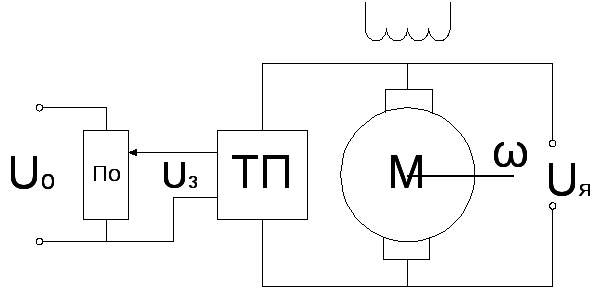
2. Принцип управления по возмущению.
И дея
принципа: необходимо каким-либо
образом измерить возмущающее воздействие
и в зависимости от результатов измерения
оказать на объект управления управляющее
воздействие, устанавливающее вредное
влияние измеренного возмущения.
дея
принципа: необходимо каким-либо
образом измерить возмущающее воздействие
и в зависимости от результатов измерения
оказать на объект управления управляющее
воздействие, устанавливающее вредное
влияние измеренного возмущения.
Недостатки принципа:
- инвариантность управляемой величины обеспечивается лишь по отношению к тому возмущению, которое измеряется.
- инвариантность управляемой величины достигается лишь при строгом соответствии параметров элементов системы расчетным образом.
3. Принцип обратной связи:
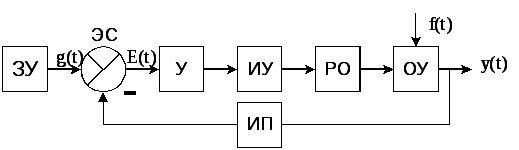
ОУ – объект управления; ИП – измерительный преобразователь
ЗУ – задающее устройство; ЭС – элемент сравнения
У – усилитель устройства; ИУ – исполнительное устройство
РО – регулирующий орган
y(t) – управляемая, регулируемая величина.;g(t) – задающее воздействие
E(t) – ошибка регулирования;f(t) – внешнее воздействие