8. Лачх и лфчх. Система координат для построения логарифмических характеристик.
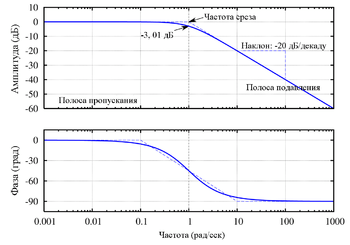
ЛАЧХ - Абсциссойлогарифмической амплитудной частотной характеристики являетсячастотав логарифмическом масштабе, поординатеотложенаамплитудавдецибелах. ЛАФЧХ позволяет производить умножение амплитуд простым методом сложения.
ЛФЧХ - Абсциссойлогарифмической фазовой частотной характеристики являетсячастотав логарифмическом масштабе, поординатеотложенафаза. Физически эта диаграмма показывает, на сколько сдвигается фаза сигнала заданной частоты при прохождении его через систему.
9. Методы построения ЛАЧХ и ЛФЧХ.
![]()
После разбиения передаточной функции на элементарные звенья можно построить ЛАФЧХ каждого отдельного звена, а результирующую ЛАФЧХ получить простым сложением.
Аппроксимация ЛАЧХ прямыми линиями
Амплитудная
шкала использует масштаб![]() ,
то есть амплитуда АФЧХ, равная 100
превращается в 40 децибел шкалы ЛАЧХ.
Представим передаточную функцию в виде
,
то есть амплитуда АФЧХ, равная 100
превращается в 40 децибел шкалы ЛАЧХ.
Представим передаточную функцию в виде
![]()
где![]() —
комплексная переменная, которую можно
связать с частотой, используя следующую
формальную замену:
—
комплексная переменная, которую можно
связать с частотой, используя следующую
формальную замену:![]() ,
,![]() и
и![]() —
константы, а Н — передаточная функция.
Тогда построить ЛАЧХ можно используя
следующие правила:
—
константы, а Н — передаточная функция.
Тогда построить ЛАЧХ можно используя
следующие правила:
в каждом S, где
 (нуль), наклон линииувеличивается
на
(нуль), наклон линииувеличивается
на
 дБ
на декаду.
дБ
на декаду.в каждом S, где
 (полюс), наклон линииуменьшается
на
(полюс), наклон линииуменьшается
на
 дБ на декаду.
дБ на декаду.Начальное значение графика можно найти простой подстановкой значения круговой частоты
 в передаточную функцию.
в передаточную функцию.Начальный наклон графика зависит от числа и порядка нулей и полюсов, которые меньше начального значения частоты. Он может быть найден с помощью первых двух правил.
В случае комплексно-сопряжённых нулей или полюсов необходимо использовать звенья второго порядка,
 ,
наклон менятся в точке
,
наклон менятся в точке сразу
на
сразу
на дБ
на декаду.
дБ
на декаду.
Для корректировки ЛАЧХ, аппроксимированную прямыми линиями надо:
в каждом нуле поставить точку на
 дБ
выше линии (
дБ
выше линии ( дБ для двух комплексно-сопряжённых
нулей),
дБ для двух комплексно-сопряжённых
нулей),в каждом полюсе поставить точку на
 дБ
ниже линии (
дБ
ниже линии ( дБ для двух комплексно-сопряжённых
полюсов),
дБ для двух комплексно-сопряжённых
полюсов),плавно соединить точки, используя прямые линии в качестве асимптот
Для построения аппроксимированной ЛФЧХиспользуют запись передаточной функции в том же виде, что и для ЛАЧХ:
![]()
Основной
принцип построения ЛФЧХ — начертить
отдельные графики для каждого полюса
или нуля, затем сложив их. Настоящая
кривая фазы задаётся уравнением
![]()
Для того, чтобы нарисовать ЛФЧХ для каждого полюса или нуля, используют следующие правила:
если
 положительно,
начать линию (с нулевым наклоном) в 0
градусов,
положительно,
начать линию (с нулевым наклоном) в 0
градусов,если
 отрицательно,
начать линию (с нулевым наклоном) в 180
градусов,
отрицательно,
начать линию (с нулевым наклоном) в 180
градусов,для нуля сделать наклон линии вверх на
 (
( для комплексно сопряжённого) градусов
на декаду начиная с
для комплексно сопряжённого) градусов
на декаду начиная с ,
,для полюса наклонить линию вниз на
 (
( для комплексно сопряжённого) градусов
на декаду начиная с
для комплексно сопряжённого) градусов
на декаду начиная с ,
,обнулить наклон снова когда фаза изменится на
 градусов
для простого нуля или полюса и на
градусов
для простого нуля или полюса и на градусов
для комплексно-сопряжённого нуля или
полюса,
градусов
для комплексно-сопряжённого нуля или
полюса,сложить все линии и нарисовать результирующую.
10. Типовые динамические звенья.
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых динамических звеньев.
|
№ (по вопросам) |
Тип звена |
Дифференциальное уравнение |
Перед функцияW=W(S) |
|
11 |
Идеальное усилительное (безынерционное) |
y=ku |
W=k |
|
12 |
Апериодическое (инерционное) |
(Tp+1)y= ku |
|
|
13 |
Апериодическое (инерционное) второго порядка |
|
|
|
14 |
Колебательное |
|
|
|
15 |
Интегрирующее идеальное |
py=ku |
|
|
16 |
Интегрирующее инерционное |
|
|
|
17 |
Изодромное |
|
|
|
|
Изодромное второго порядка |
|
|
|
18 |
Дифференцирующее (ид.) |
y=kpu |
W=ks |
|
19 |
Дифференцирующее инерционное |
|
|
|
20 |
Форсирующее |
|
|