

5 Разработка алгоритма работы мпс
Обработка
информации от цифровых датчиков и выдача
управляющего воздействия y1
производится путем ввода значений x1,
x2,
x3,
x4
и вычисления булевой функции
 .
.
При единичном значении f1 вырабатывается управляющий сигнал y1=1 длительностью t1=25мкс.
При обработке информации с аналоговых датчиков ПМ принимает коды NU1, NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функции NU=f2(NU1,NU2, К)=min(NU1,NU2+K) и сравнивается с константой Q, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично y1) один из двух двоичных управляющих сигналов y2 или y3 заданной длительности по следующему правилу: если NU<Q, то выдать y2 длительностью t2=70 мкс, иначе выдать y3 длительностью t3=150мкс.
Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:

Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, участвующие в вычислениях: NU1, NU2, NU3, К, Q, A0, A1, Y4 рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов длительностью 30 мкс интервалом 30 мкс, выполняется команда процессора СТОП.
Блок-схема заданного цикла управления представлена на рисунке 27.


- ввод в ЦП двоичных кодов с выходов АЦП и констант К и Q.
- вычисление значения функции f2(NU1, NU2, К)




- условие на результат вычисления.
- выдача управляющего сигнала.
- ввод в ЦП двоичных кодов с выходов АЦП и констант К и Q.
- вычисление значения функции f2(NU1, NU2, К)

- условие на результат вычисления.
- выдача управляющих сигналов
- ввод в ЦП двоичного кода с выхода АЦП NU3

- вычисление функции Y4


- выдача управляющих воздействий по результатам 2 циклов на светодиодную индикацию
- проверка состояния тумблера «СТОП» на пульте управления.
Рисунок 27 — Блок-схема управляющей программы
6 Реализация системы для мониторирования физиологических параметров человека на базе к580вм80
Контроль функционального состояния человека в процессе его активной деятельности актуальная задача спортивной и космической медицины. В Московском инженерно-физическом институте разработана микропроцессорная (МП) система МИФИП (МП измеритель физиологических параметров) для контроля в реальном времени частоты сердечных сокращений (ЧСС) и температуры тела человека. Система спроектирована на базе МПК БИС серии К580 и ОЭВМ с аналоговыми устройствами ввода- вывода КМ1813ВЕ1.
Особенности системы — малые габариты, высокая точность и помехоустойчивость измерений. (Основное требование, поскольку при двигательной активности человека уровень помех (артефакты движения) возрастает.) Помехи по амплитудным и частотным характеристикам близки к параметрам электрокардиографического сигнала.
Согласно
структурно-функциональной схеме система
МИФИП (рисунок 28) имеет четыре измерительных
канала (по двум из которых измеряются
ЧСС, а по двум другим — температура),
вторичный преобразователь
физиологическихсигналов (ПФС), устройство
преобразования и обработки (УПО) и четыре
устройства индикации. 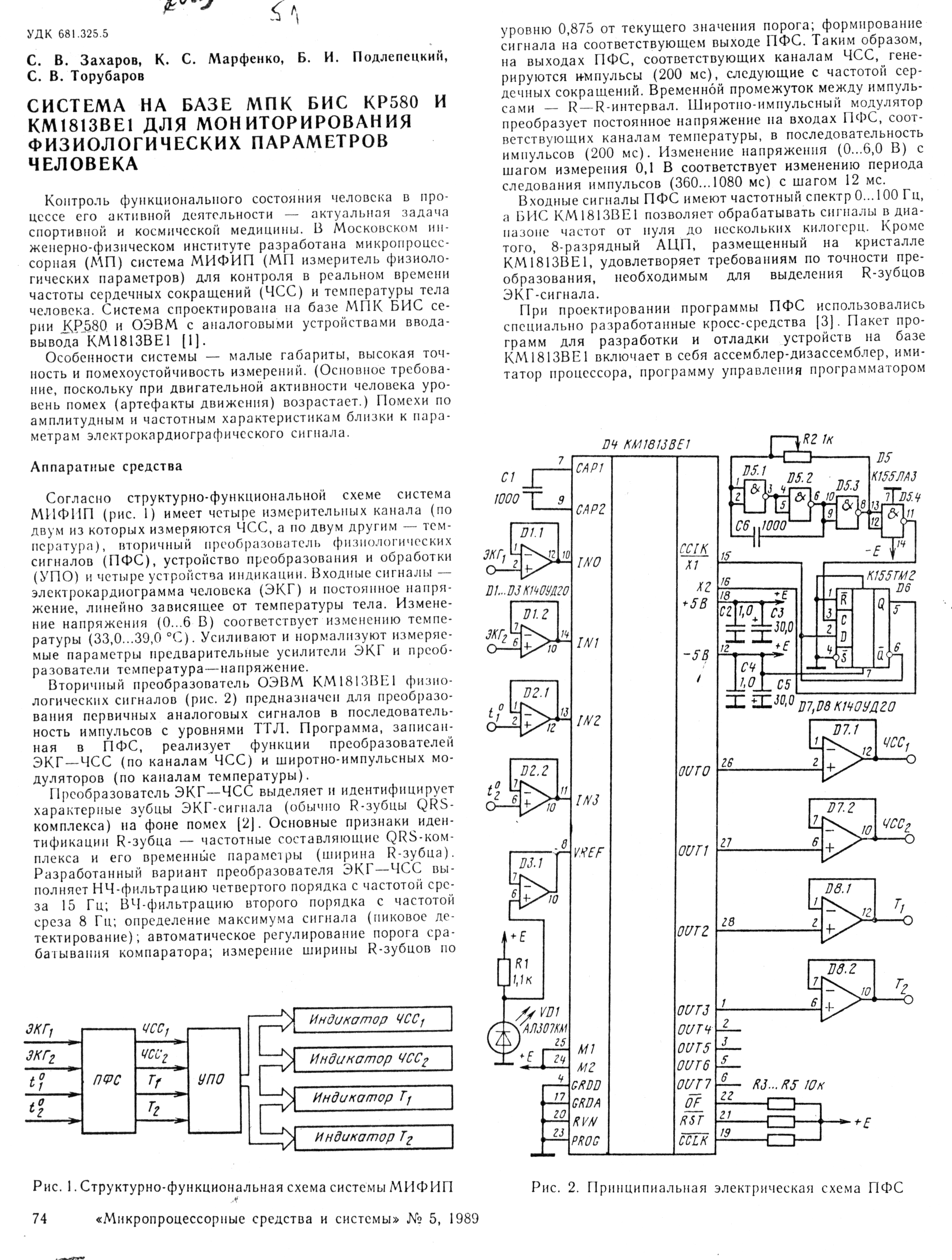
Рисунок 28 – Структурно-функциональная схема МИФИП
Входные сигналы — электрокардиограмма человека (ЭКГ) и постоянное напряжение, линейно зависящее от температуры тела. Изменение напряжения (0...6 В) соответствует изменению температуры(33,0...39,0 °С). Усиливают и нормализуют измеряемые параметры предварительные усилители ЭКГ и преобразователи температура — напряжение.
Вторичный
преобразователь ОЭВМ КМ1813ВЕ1 физиологических
сигналов (рисунок 29) предназначен для
преобразования первичных аналоговых
сигналов в последовательность импульсов
с уровнями ТТЛ. Программа, записанная
в ПФС, реализует функции преобразователей
ЭКГ—ЧСС (по каналам ЧСС) и
широтно-импульсных
модуляторов (по каналам температуры). 
Рисунок 29 – Принципиальная электрическая схема ПФС
Преобразователь ЭКГ—ЧСС выделяет и идентифицирует характерные зубцы ЭКГ-сигнала (обычно R-зубцы Q R S -комплекса) на фоне помех [2]. Основные признаки идентификации R-зубца — частотные составляющие QRS-KOM-плекса и его временные параметры (ширина R-зубца). Разработанный вариант преобразователя ЭКГ—ЧСС выполняет НЧ-фильтрацию четвертого порядка с частотой среза 15 Гц; ВЧ-фильтрацию второго порядка с частотой среза 8 Гц; определение максимума сигнала (пиковое детектирование); автоматическое регулирование порога срабатывания компаратора; измерение ширины R-зубцов по уровню 0,875 от текущего значения порога; формирование сигнала на соответствующем выходе ПФС.
Таким образом, на выходах ПФС, соответствующих каналам ЧСС, генерируются и-мпульсы (200 мс), следующие с частотой сердечных сокращений. Временной промежуток между импульсами R — R-интервал. Широтно-импульсный модулятор преобразует постоянное напряжение на входах ПФС, соответствующих каналам температуры, в последовательность импульсов (200 мс). Изменение напряжения (0...6,0 В) с шагом измерения 0,1 В соответствует изменению периода следования импульсов (360... 1080 мс) с шагом 12 мс. Входные сигналы ПФС имеют частотный спектр 0... 100 Гц. БИС КМ1813ВЕ1 позволяет обрабатывать сигналы в диапазоне частот от нуля до нескольких килогерц. Кроме того, 8-разрядный АЦП, размещенный на кристалле КМ1813ВЕ1, удовлетворяет требованиям по точности преобразования, необходимым для выделения R-зубцов ЭКГ-сигнала. При проектировании программы ПФС использовались специально разработанные кросс-средства. Пакет программ для разработки и отладки устройств на базе КМ1813ВЕ1 включает в себя ассемблер-дизассемблер, имитатор процессора, программу управления программатором.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования была разработана управляющая МПС на базе микро-ЭВМ К580ВМ80. Для этого был проведен литературный поиск, на основе которого подобраны элементы микропроцессорной системы, такие как буферный регистр КР580ИР82, аналогово-цифровой преобразователь К572ПВ3, шинный формирователь КР580ВА86, программируемый контроллер прерываний КР580ВН59, программируемый параллельный интерфейс КР580ВВ55,программируемый контроллер клавиатуры и индикации КР580ВВ79, программируемый таймер КР580ВИ53.
На основе упрощенной и уточненной схем управляющей микропроцессорной системы разработана функциональная схема управляющей микро-ЭВМ на базе микро-ЭВМ К580ВМ80.
Была разработана блок-схема алгоритма управляющей программы, по которой можно написать программу на языке Ассемблер для данного типа однокристальной микро-ЭВМ.
Также в ходе проектирования была предложена реализация данной микро-ЭВМ К580ВМ80 в устройстве «системы для мониторирования физиологических параметров человека на базе К580ВМ80».
Была решена основная задача курсового проекта – развитие и закрепление навыков самостоятельной работы при решении конкретной задачи разработки микропроцессорной системы.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
-
Алексеенко А. Г. Микросхемотехника: Учебное пособие для вузов / А.Г. Алексеенко, И. И. Шагурин. Под ред. И.П. Степаненко. – М. : Радио и связь, 1982. – 435 с.
-
Балашов Е.П., Пузанков Д.В. Микропроцессоры и микропроцессорные системы: Учебное пособие для вузов/Под ред. В.Б. Смолова. – М.: Радио и связь, 1981.
-
Горбунов В.Л., Панфилов Д.И., Преснухин Д.Л. Микропроцессоры. Основы построения микро-ЭВМ. – М.: Высшая школа, 1986.
-
Лебедев О.Н. Микросхемы памяти и их применение / Лебедев О.Н. – М.: Радио и связь, 1990. – 160 с.
-
Микропроцессорные средства и системы №5,1985.
-
Преснухин Л.Н. Микропроцессоры / Преснухин Л.Н. – М.: Высшая школа,1986. – 243с.
-
Сташин В.В., Урусов А.В., Мологонцева О.Ф. - Проектирование цифровых устройств на однокристальных микроконтроллерах. – М.:Энергоатомиздат,1990.-224с.
-
Федорков Б.Г. Микросхемы ЦАП и АЦП - функционирование, параметры, применение М.:Энергоатомиздат,1990.-320 с.
-
Хвощ С.Т., Варлинский Н.Н., Попов Е.А. Микропроцессоры и микроЭВМ в системах автоматического управления: справочник – Л.: Машиностроение, 1987. – 640 с
-
http://microprocesser.narod.ru
ПРИЛОЖЕНИЕ А
(обязательное)
Графическая часть
-
Структура и условно-графическое изображение МП К580ВМ80 50
-
Микросхемы памяти 51
-
Условно графическое обозначение узлов МПС 52
-
Упрощенная структурная схема МПС на базе МП К580ВМ80 55
-
Уточненная структурная схема МПС на базе МП К580ВМ80 56
-
Разработка алгоритма МП 57
-
Реализация системы для мониторирования физиологических
параметров человека на базе К580ВМ80 58