

2.4 Уточнення коренів
До найбільш поширених методів уточнення коренів алгебричних і трансцендентних рівнянь відносять методи:
– половинного ділення (інші назви: бісекції, дихотомії);
– хорд (помилкового положення);
– дотичних (Ньютона);
2.4.1 Метод половинного ділення
Суть методу, в тому, що відрізок ізоляції кореня а, b ділять навпіл точкою х1 = 0,5(а+b) і обчислюють f(x1). Якщо f(x1) = 0, то х1 є точне значення кореня. Якщо f(x1) 0, але (b-a) 2ε (ε – задана точність визначення кореня) , то х1 – є наближене значення кореня що знайдено із заданою точністю. Якщо f(x1) 0 і
( b-a)
> 2ε,
тоді розглядають той з двох відрізків
[a,
x1]
і [x1,
b],
на кінцях якого функція f(x1)
набуває значень протилежних знаків
(рис. 2.1). Цей відрізок знов ділять навпіл
точкою х2
(друге наближення кореня) і так само
визначають, чи не перевищує абсолютна
похибка наближення кореня х2
величини ε. Очевидно, що знаходження
чергового наближення кореня після n
ітерацій здійснюється за виразом
b-a)
> 2ε,
тоді розглядають той з двох відрізків
[a,
x1]
і [x1,
b],
на кінцях якого функція f(x1)
набуває значень протилежних знаків
(рис. 2.1). Цей відрізок знов ділять навпіл
точкою х2
(друге наближення кореня) і так само
визначають, чи не перевищує абсолютна
похибка наближення кореня х2
величини ε. Очевидно, що знаходження
чергового наближення кореня після n
ітерацій здійснюється за виразом
xn+1 = 0,5(an + bn). (2.5)

Рисунок 2.1 – Графічне зображення суті методу половинного ділення
Алгоритм методу половинного ділення можна зобразити таким чином:
Завдання a, b, ε;
R = f(a);
► x = 0,5(a + b);
f(x);
якщо
![]() то
х – корінь;
то
х – корінь;
 да,
то
да,
то
![]() ►
►![]()
 інакше
R·f(x)
< 0 ?
інакше
R·f(x)
< 0 ?
ні,
то
![]() ,
R
= f(x)
,
R
= f(x)![]() ►.
►.
2.4.2 Метод хорд
В цьому методі відрізок С ділять не навпіл, а у відношенні f(a) / f(b). Суть методу полягає в тому, що за наближення до кореня приймаються значення x1, x2, x3, …, xn точок перетину хорди з віссю абсцис (рис. 2.2).

Рисунок 2.2 – Графічне зображення ідеї методу хорд
Наступне наближення кореня визначається за формулою
![]()
 (2.6)
(2.6)
де с –
так звана нерухома точка, за яку
приймається той з кінців відрізка а,
b,
для котрого знак функції збігається зі
знаком другої похідної (![]() ).
На рис. 2.2 с = а. Другий кінець відрізка
а,
b
приймається за початкове наближення
х0,
що використовується формулою (2.6).
).
На рис. 2.2 с = а. Другий кінець відрізка
а,
b
приймається за початкове наближення
х0,
що використовується формулою (2.6).
Ітераційний процес закінчується при виконанні умови
![]() ,
,
де
![]() – найменше значення модуля першої
похідної на відрізку а,
b.
– найменше значення модуля першої
похідної на відрізку а,
b.
Для використання методу хорд необхідно для інтервалу [a, b] обчислити
![]() і
і
![]() .
За допомогою одержаних значень визначити
величини m,
c,
x0
таким
чином:
.
За допомогою одержаних значень визначити
величини m,
c,
x0
таким
чином:
![]() ;
якщо
f(a)
і
;
якщо
f(a)
і
![]() мають однаковий знак, то с = а і х0
= b
(відповідно, якщо однаковий знак мають
f(b)
і
мають однаковий знак, то с = а і х0
= b
(відповідно, якщо однаковий знак мають
f(b)
і
![]() ,
то с = b
і
х0
= а).
,
то с = b
і
х0
= а).
Далі алгоритм методу хорд виглядає так:
Завдання ε, m, c, x0;
f(c);
R = f(x0);
► x
=
![]() ;
;
f(x);
якщо
![]() ,
то
х – корінь;
,
то
х – корінь;
інакше:
R
= f(x),
x0
= x![]() ►.
►.
2.4.3 Метод дотичних
Метод полягає в побудові ітераційної послідовності
![]()
 ,
(2.7)
,
(2.7)
що збігається до кореня рівняння f(x) = 0.
Достатні
умови
збіжності
метода: послідовність (2.7) збігається
до дійсного значення кореня рівняння
f(x)
= 0,
якщо початкове наближення кореня (х0)
належить інтервалу а,
b,
на котрому
![]() і
і
![]() зберігають свій знак і задовольняється
умова
зберігають свій знак і задовольняється
умова
![]() .
.
За х0
приймають той з кінців відрізка а,
b,
для якого
![]() (в методі хорд це нерухома точка).Метод
допускає просту геометричну інтерпретацію,
а саме: якщо через точку з координатами
(в методі хорд це нерухома точка).Метод
допускає просту геометричну інтерпретацію,
а саме: якщо через точку з координатами
![]() провести дотичну, то абсциса точки
перетину цієї дотичної з віссю х і є
чергове наближення кореня рівняння
f(x)
= 0 (рис. 2.3).
провести дотичну, то абсциса точки
перетину цієї дотичної з віссю х і є
чергове наближення кореня рівняння
f(x)
= 0 (рис. 2.3).
Ітерації продовжуються до виконання умови
![]() ,
,
Де М – найбільше значення модуля другої похідної на відрізку а, b,
![]() .
.
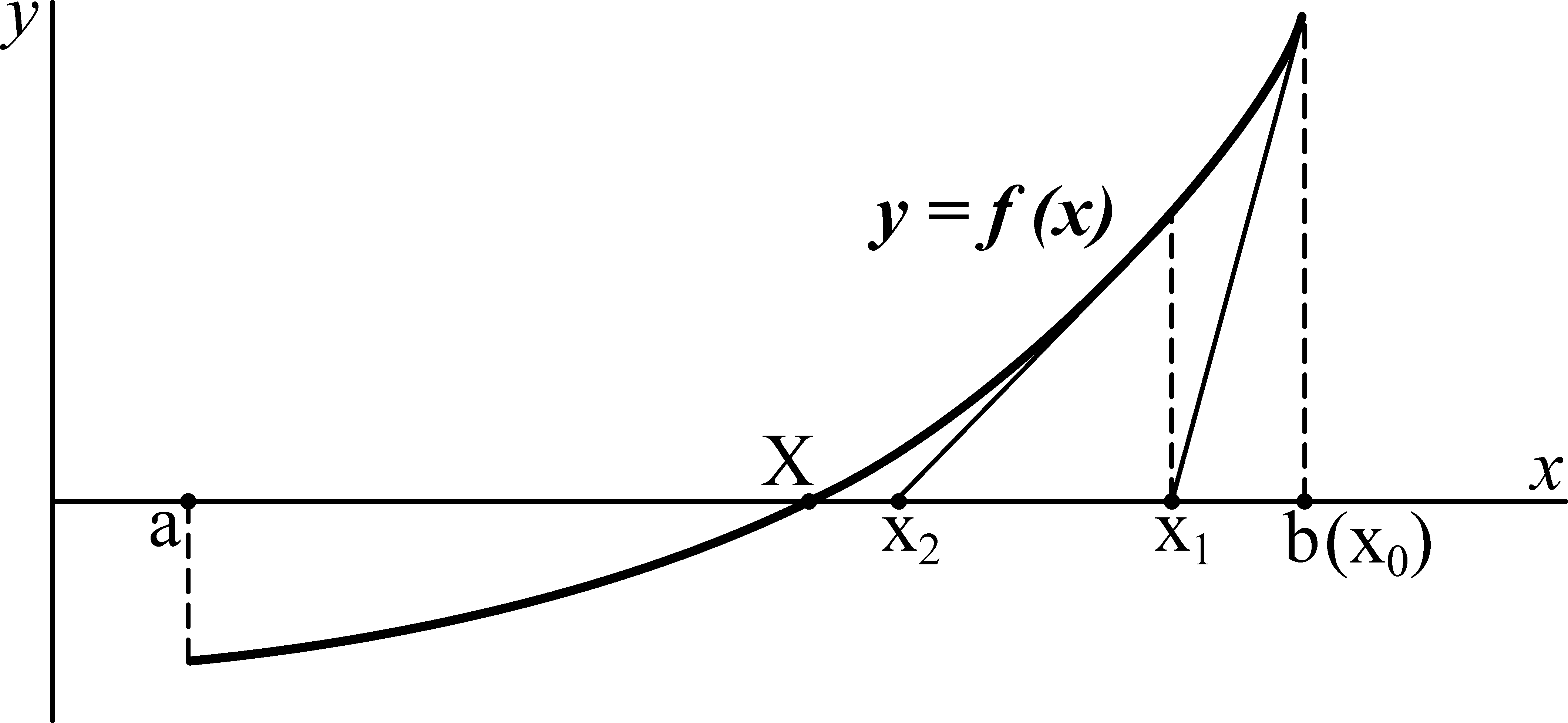
Рисунок 2.3 – Графічне подавання ідеї методу дотичних
Для
використання методу дотичних необхідно
для інтервалу [a,
b]
обчислити
![]() і
і
![]() .
За допомогою одержаних значень визначити
величини m,
М,
x0
таким
чином:
.
За допомогою одержаних значень визначити
величини m,
М,
x0
таким
чином:
![]() ;
;
![]() ,
якщо f(a)
і
,
якщо f(a)
і
![]() мають однаковий знак, то х0
= а.
мають однаковий знак, то х0
= а.
Далі алгоритм методу дотичних може виглядати так:
Завдання ε, m, М, x0;
► х = х0;
f(x);
![]()
![]() ;
;
якщо
![]() ,
то
х – корінь;
,
то
х – корінь;
інакше:
x0
= x![]() ►.
►.
Метод
дотичних має високу швидкість збіжності,
однак недоліком його є необхідність
обчислення похідної
![]() на кожній ітерації. Якщо
на кожній ітерації. Якщо
![]() мало змінюється на відрізку а,
b,
то можна значно зменшити обсяг обчислень,
якщо скористуватися модифікованим
методом Ньютона
з використанням формули
мало змінюється на відрізку а,
b,
то можна значно зменшити обсяг обчислень,
якщо скористуватися модифікованим
методом Ньютона
з використанням формули

![]() .
.
2.4.4 Комбінований метод хорд і дотичних
Методи хорд і дотичних дають наближення кореня з різних боків. Тому їх часто поєднують і уточнення кореня відбувається скоріше.
Н а
кожній ітерації використовується
спочатку формула (2.7), потім – формула
(2.6), в якій за с
приймають значення x,
що
розраховано на даному кроці за
формулою(2.7). Процес закінчується, коли
а
кожній ітерації використовується
спочатку формула (2.7), потім – формула
(2.6), в якій за с
приймають значення x,
що
розраховано на даному кроці за
формулою(2.7). Процес закінчується, коли
![]() Остаточне значення кореня визначається
формулою
Остаточне значення кореня визначається
формулою
![]() ,
(2.8)
,
(2.8)
де
![]() і
і
![]() – наближення кореня, які розраховані
відповідно за формулами (2.6) і (2.7).
– наближення кореня, які розраховані
відповідно за формулами (2.6) і (2.7).
2.4.5 Метод ітерацій
Для
знаходження кореня методом ітерацій
(простих) рівняння f(x)
= 0 приводять до вигляду
![]() так,
щоб виконувалось співвідношення
так,
щоб виконувалось співвідношення
![]() ,
яке є достатньою умовою збіжності
ітераційного процесу.
,
яке є достатньою умовою збіжності
ітераційного процесу.
На інтервалі а, b обирають початкове наближення х0 (бажано в середині інтервалу, щоб похибка заокруглення не вивела за межі а, b, де виконуються умови збіжності); наступні наближення визначаються за формулою
![]()
 (2.9)
(2.9)
доти, поки не буде виконано умову
![]() (2.10)
(2.10)
(можна
прийняти
![]() ).
).
З
геометричної точки зору коренем рівняння
![]() є абсциса точки перетину кривої
є абсциса точки перетину кривої
![]() і прямої
і прямої
![]()
Характер
зміни
![]() в
процесі обчислень за формулою (2.9), а
також вид
умови
закінчення ітерацій
залежать від знака і абсолютної величини
в
процесі обчислень за формулою (2.9), а
також вид
умови
закінчення ітерацій
залежать від знака і абсолютної величини
![]()
![]() на інтервалі а,
b.
на інтервалі а,
b.
– Якщо
![]() ,
то послідовні наближення сходяться до
кореня монотонно.
При цьому, якщо q
0,5
за умову закінчення ітерацій можна
прийняти
,
то послідовні наближення сходяться до
кореня монотонно.
При цьому, якщо q
0,5
за умову закінчення ітерацій можна
прийняти
![]() .
(2.11)
.
(2.11)
– Якщо
![]() ,
то послідовні наближення коливаються
навколо дійсного значення кореня і при
цьому також можна користуватися умовою
(2.11). Таким чином, умову (2.10) необхідно
використовувати тільки в тих випадках,
коли
,
то послідовні наближення коливаються
навколо дійсного значення кореня і при
цьому також можна користуватися умовою
(2.11). Таким чином, умову (2.10) необхідно
використовувати тільки в тих випадках,
коли
![]() і
і
![]() .
.
Не завжди
легко обрати функцію
![]() ,
що задовольняє умові збіжності.
,
що задовольняє умові збіжності.
Розглянемо
один з алгоритмів переходу від рівняння
![]() до рівняння
до рівняння
![]() Помножимо ліву і праву частини рівняння
Помножимо ліву і праву частини рівняння
![]() на довільну константу h
і додамо до обох частин невідоме х
на довільну константу h
і додамо до обох частин невідоме х
![]()
при цьому корені вихідного рівняння не зміняться.
Позначимо
![]() і одержимо
і одержимо
![]()
Очевидно,
що при будь-яких
![]() рівняння
рівняння
![]() і
і
![]() рівносильні. Константу
рівносильні. Константу
![]() бажано обрати такою, щоб
бажано обрати такою, щоб
![]() ,
тоді буде забезпечена збіжність
ітераційного процесу.
,
тоді буде забезпечена збіжність
ітераційного процесу.
Похідна
![]() .
Найбільша швидкість збіжності має місце
при
.
Найбільша швидкість збіжності має місце
при
![]() ,
тоді
,
тоді
![]() і ітераційна формула (2.9) переходить у
формулу Ньютона (метода дотичних)
і ітераційна формула (2.9) переходить у
формулу Ньютона (метода дотичних)
![]() .
.