

-
а — произвольное положение; б — в положении i = imin
-
Рис. 13.49. Зависимость коэффи циента скольжения е от «j н 4 = = а2 — otj для вариаторов «Вебо»
-
-
"ср, "-ср
-
-
Среднее значение коэффициента скольжения
-
Совместное решение уравнений (13.35) и (13.36) приводит к выражению
-
tmin>„!nfT ,Гп2(а2-«,)- (13-37)
-
SmKl+ 2 cos а,
-
При небольших значениях ах и малой разности А значение imin > 1 и работа вариатора на ускорение практически неосуществима; увеличение а1 позволяет значительно расширить диапазон регулирования в области i <;1•
-
Таким образом, соответствующий выбор at и а2 позволяет проектировать передачу для конкретных условий, например с минимальным скольжением, малыми габаритами или с расширенным диапазоном регулирования.
-
В вариаторах «Вебо» а! = 80 -4- 85°, а2 = 85 4- 90°, при этом jmin ж 0,6 -т- 0,8; из условий допустимого скольжения imax = 1,5 4--f- 2,0, тогда Д = 2 4- 3,5.
-
Ведущий конус вариатора стальной или чугунный; ведомая чашка — со сменным текстолитовым кольцом; передача работает без смазки.
-
Преобразовывая выражение (13.25), получаем следующую зависимость для проектного расчета:
-
Rt^ 0,4441/ ^Vjg^fft;, sift а8 (cos *.-^), 03-38)
-
где ф=Л = -^—. т b b sin а2
-
Основные размеры вариатора определяют в такой последовательности: 1) выбирают углы конусов а, и а2; 2) находят R2 по формуле (13.38) при г|) = 10 -i- 20; 3) определив A?lmin, Rimax, делают первую эскизную компоновку фрикционных тел вариатора. Построение целесообразно выполнить в положении при е = 0, т. е. когда вершины конусов совпадают; 4) находят imm по формуле (13.37) и 8 в крайних точках при t'max, *'min по формуле (13.22); 5) в заключение проверяют эскизную компоновку и значения /т1п и е и вносят необходимые коррективы в принятые ранее аи а2 и г|э.
-
Усилие нажатия при М2 — const постоянно, в этом случае при подпружиненной ведомой чашке целесообразно принимать а2"= 90° и брать пружину малой жесткости.
-
При N2 — const усилие нажатия Q меняется, и переменное усилие пружины
-
-
f sin а2 R2
-
Горизонтальное перемещение х ведомой чашки (рис. 13.48):
-
I?S2S. (13.39)
-
sm а2/ sin ах v '
-
Жесткость пружины
-
т —Т ■
-
max min
-
-
Используя выражение для Тих, получаем
-
С =
-
/ ' #1 / sin а2
-
' * cosa2(
-
Если привод работает с изменением как М2, так и N2, то целесообразно применить косозубую передачу между валами вариатора (см. рис. 13.47) для обеспечения прижатия соответственно передаваемой нагрузке. Угол наклона зуба рш шестерни диаметра йш определится из выражения
-
I
-
sin a2
-
D2
-
(13.40)
-
Первый вал вариатора выполняют в такой конструкции плавающим. Ширину шестерни bm при ос2 <; 90° следует выбирать с учетом наибольшего горизонтального перемещения хтах. Пружина с малой жесткостью обязательна во избежание пробуксовки на холостом ходу. Однако так как рш ограничивается значениями 8 — 15°, то по формуле (13.40)
-
получаем что часто приводит к неудачным конструктив-
-
ным решениям. В таких случаях применяют комбинированный нажим
-
-
косозубой парой и пружиной.
-
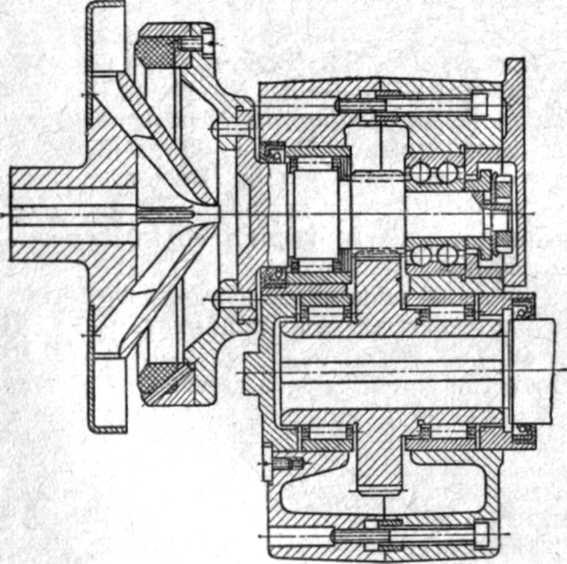
Конусный вариатор с параллельными валами, представленный на рис. 13.50, выполняют обычно в комбинации с зубчатой передачей; вал вариатора с конической чашкой и шестерней может свободно поворачиваться около оси зубчатого колеса в пределах необходимого угла (рис. 13.51). Регулирование осуществляется перемещением ведущего конуса вариатора вдоль его оси, одновременно поворачивается вал с ведомым конусом. Осевое
-
Рис. 13.50. Конусный вариатор с параллельными перемещение конуса осу- валами ществляют или совмест-
-
но с электродвигателем, расположенным на салазках, или вдоль вала двигателя на скользящей втулке (рис. 13.52)."

-
-
и возрастает скольжение; обычно 2,5 -4- 4, и тогда Д да 2 -т- 3.
-
b sin а
-
принимают а = bU + 60°; tmax = 2,о -5-4, и
-
Так как в рассматриваемых вариаторах скольжение больше, чем в передачах «Вебо», то приходится принимать
-
-
ших а уменьшается г|з —
-
b sin а
-
-
50
-
■ 25-i-40.
-
Последовательность расчета аналогична рассмотренной выше.
-
Нажатие в вариаторе осуществляется реактивным моментом зубчатого зацепления и, следовательно, зависит от внешней нагрузки.
-
Рассматривая равновесие качающегося рычага, получаем (см. рис. 13.51)
-
Q-
-
-
l + ^a sin б
-
то запас сцеп-
-
-
= ——?—— р cos a cos б ш'
-
Так как РШ = Р?2-
-
ления
-
Р-? = c-oWc^(S+Sin6)- <13'41)
-
Согласно рис. 13.51
-
sin 6 =
-
л2-US.+№-/?!)*]
-
2Am(R2-R>)
-
(13.42)