-
При ведущем диске (рис. 13.42, б) для случая М2 = const радиус ведомого колеса \
-
R2 = 0,444 У^-щЕар /шах Ф; (13.33)
-
-
здесь 1|з = —^—.
-
Определив /?, или /?2, остальные размеры находят по значениям Д и г|>.
-
При проектном расчете принимают: для передач с регулируемым нажатием р" ж 1,3 при етах = 5 10%; ij> = 18 н- 10 соответственно.
-
Для передач, работающих с постоянной мощностью N2 — const, ведущим выполняют цилиндрическое колесо, при постоянном моменте М2 — const ведущим выполняют диск. Лобовые вариаторы допускают простое реверсирование передачи.
-
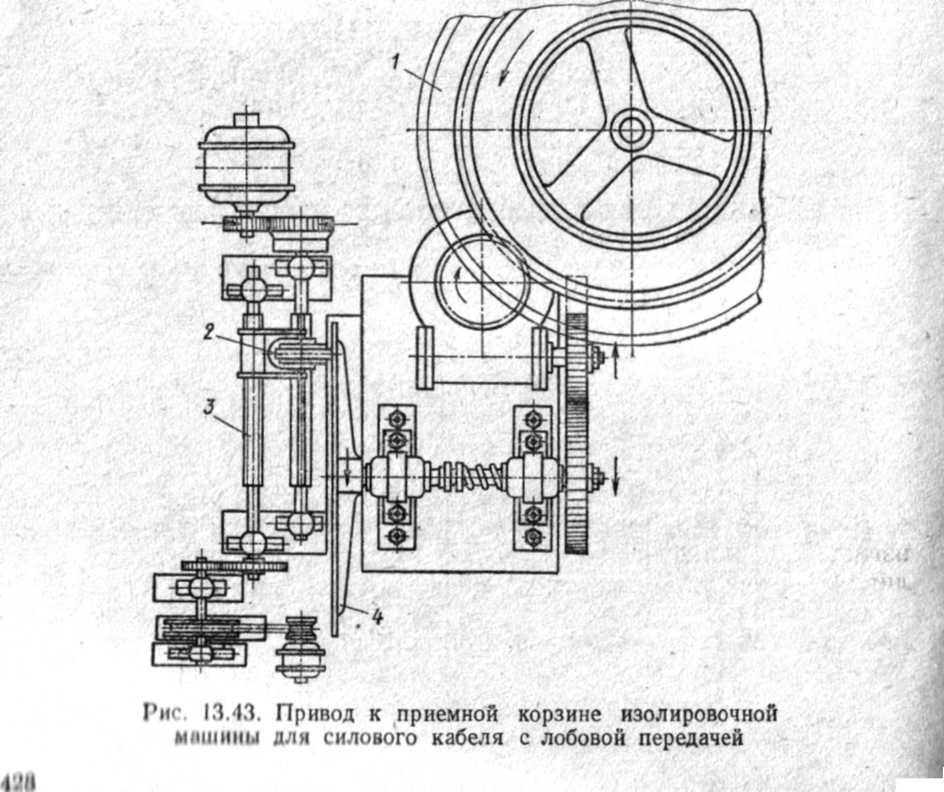
Простейшая конструкция лобовой передачи применена в приводе к приемной корзине изолировочных машин силового кабеля (рис. 13.43). Кабель укладывается в корзину / по спирали, и поэтому при постоянной производительности машины угловая скорость корзины должна плавно регулироваться. Ведущее колесо 2 вариатора перемещается относительно ведомого диска 4 винтом 3, последний имеет индивидуальный электропривод. Значительная изгибающая нагрузка на
-
-
ведущий вал при вынужденно большом расстоянии между его опорами является существенным недостатком подобных конструкций.

-
Жесткость конструкции имеет первостепенное значение, так как с ней связано распределение напряжений в зоне контакта фрикционных тел.
-
Более совершенная конструкция лобового вариатора представлена на рис. 13.44. К достоинствам ее следует отнести разгрузку валов от изгибающих моментов, двухпоточное распределение мощности, регулирование усилия нажатия, уменьшенное скольжение.
-
Коэффициент скольжения ес для обычной сдвоенной лобовой передачи (рис. 13.42, в) в крайнем положении (i = imaK) определяем, пренебрегая единицей в знаменателе формулы (13.31) и принимая 0 = 1:
-
ес = ei + Ч = 5-^ Ь тг— = н-^— (Д + 1).
-
"Дт1п "типах "дгаах
-
-
-
Для усовершенствованной конструкции лобового вариатора (см. рис. 13.44) при тех же упрощениях
-
Ее= ^1 + е2 =
-
Ь
-
чдгаах
-
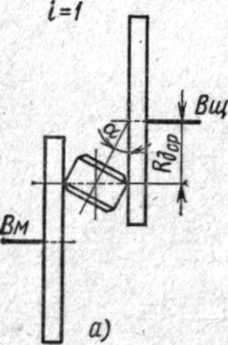
Рис. 13.45. Схема лобового вариатора усовершенствованной конструкции:
-
а — при С— 1; б— при 1= imax
-
-
Как видно, её < ес, и суммарное скольжение не зависит от угла а.
-
Когда ось вращения промежуточного ролика пересекает ось вращения диска в его центре, то скольжение отсутствует (рис. 13.45, а). Если принять симметричное регулирование, то целесообразно, чтобы при i = 1
-
q max ~Г"^д mln
-
К д. ср 2
-
Для проектного прочностного расчета (при симметричном регулировании, рис. 13.45, б)

-
Р Mi
Г
-
/?д min s^s 0,444 |^ ^ - ^Пр
-
sin' a cos а;
-
(13.34)
-
здесь, как и ранее,
-
-
-
-
Обычно принимают а = 30 -5- 45°; при малых а возрастают радиальные габариты вариатора, выбор больших а приводит к значительному увеличению расстояния между дисками.
-
Промежуточный ролик имеет постоянный поясок контакта и удвоенное число циклов нагружения. Рекомендуются сочетания материалов: сталь ШХ15 (ролик) и сталь 45 (диск) со смазкой или сталь — текстолит без смазки.
-
В конструкции на рис. 13.44 применено шариковое нажимное устройство, установленное на ведомом валу вариатора; подобный вариатор целесообразно эксплуатировать при М2 = const. Вариаторы такой конструкции рассчитаны на диапазоны регулирования Д <; 10 при пх = 1400 об/мин и N ~ 13 кВт при максимальной частоте вращения ведомого вала; регулирование несимметричное: imin = 0,5 и
-
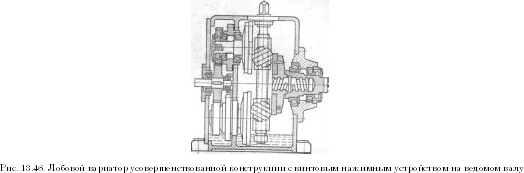
На рис. 13.46 изображен вариатор аналогичной конструкции, но с винтовым нажимным устройством на ведомом валу.
-
-
Конусные вариаторы
-
Типичная конструкция конусного вариатора показана на рис. 13.47.
-
Ведущий конус расположен непосредственно на валу фланцевого электродвигателя. Последний крепится к корпусу вариатора винтовым регулировочным механизмом, управляемым штурвалом. Зубчатая передача от винта осуществляет привод на указатель скорости ведомого вала вариатора.
-
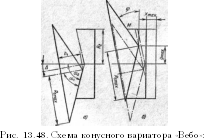
Коэффициент скольжения е зависит от углов конусов
-
а, и а2 (рис. 13.48). На рис. 13.49 даны значения е в крайних положениях. Скольжение определялось в функции а2 при различных значениях А = а2 — а:. -
-
При i — imax коэффициент скольжения с увеличением а2 интенсивно возрастает (кривые ар, Ьр и ср), в то время как при работе на ускорение (i = imin) увеличение е незначительно (кривые ау, qy, су). Оценивая скольжение по средней величине (кривые аср, Ьср, сср), можно заключить, что для уменьшения е целесообразно принимать большие значения Д.
-
Выбор меньших значений а2 и а, позволил бы уменьшить е, но при этом увеличиваются осевые габариты передачи, так как высота ведущего конуса (см. рис. 13.48)
-
hx = Rl max ctg a = Ri тшД ctg a,.
-
Углы at и a2 влияют также на ограничение imin вариатора вследствие возможного касания ведущего конуса с ведомой чашкой в диаметрально противоположной точке М.
-
Согласно рис. 13.48, б имеем
-
#1тах = (/?2 + Утах)^паз, (#2 + #тах) ctS «2 = (R2 - Уп
sin at
-
-
-
к) tg ф;
-
(13.35) (13.36)
-
здесь ф = 90° — (2ах — 02).
-
а2