

Часть 3 элементы аналитической геометрии
Аналитическая геометрия – это раздел геометрии, в котором геометрические объекты исследуются алгебраическими методами, основанными на методе координат.
Метод координат описал французский философ и математик Рене Декарт (1596–1650). А применение его к изучению пространственных линий и поверхностей впервые было сделано Леонардом Эйлером (1707–1783).
1. Системы координат на плоскости
1.1. Декартова и полярная системы координат на плоскости
В основе метода координат лежит понятие системы координат. Под системой координат на плоскости понимают способ, позволяющий численно описать положение точки на плоскости.
Декартова
система координат на плоскости. Декартова
система
координат
(ДСК) – это
две взаимно перпендикулярные оси
![]() и
и
![]() с выбранным положительным направлением
и масштабом. Оси называют осями
координат,
с выбранным положительным направлением
и масштабом. Оси называют осями
координат,
![]() –
осью
абсцисс,
–
осью
абсцисс,
![]() –
осью ординат.
Точка О
пересечения осей
–
осью ординат.
Точка О
пересечения осей
![]() и
и
![]() называется началом
координат.
Такую систему координат обозначают
называется началом
координат.
Такую систему координат обозначают
![]() .
.
Координатами
точки М
в системе координат
![]() называются
координаты радиус-вектора
называются
координаты радиус-вектора
![]() ,
,
![]() и
и
![]() называются абсциссой
и ординатой
точки М
соответственно. Точка М
имеет координаты
называются абсциссой
и ординатой
точки М
соответственно. Точка М
имеет координаты
![]() и
и
![]() обозначают как
обозначают как
![]() .
.
Эти
два числа
![]() и
и
![]() полностью определяют положение точки
на плоскости, а именно: каждой паре чисел
полностью определяют положение точки
на плоскости, а именно: каждой паре чисел
![]() и
и
![]() соответствует единственная точка
соответствует единственная точка
![]() плоскости, и наоборот.
плоскости, и наоборот.
Полярная
система координат на плоскости. Полярная
система координат
на плоскости задается точкой
![]() ,
называемой полюсом,
лучом
,
называемой полюсом,
лучом
![]() ,
называемым полярной
осью, и
единичным вектором
,
называемым полярной
осью, и
единичным вектором
![]() того же направления, что и луч
того же направления, что и луч
![]() (рис.
14).
(рис.
14).
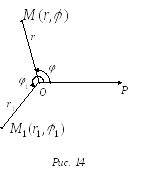
Положение
точки М
в этой системе задается двумя числами:
так называемым полярным
радиусом
![]() и полярным
углом ,
то есть углом
между полярной
осью и вектором
и полярным
углом ,
то есть углом
между полярной
осью и вектором
![]() .
.
Полярный угол измеряется в радианах и отсчитывается от полярной оси против часовой стрелки.
Точка
М,
заданная таким образом,
имеет полярные
координаты
![]() .
.
В
полюсе
![]() ,
а угол
неопределенен. Для остальных точек
плоскости
,
а угол
неопределенен. Для остальных точек
плоскости
![]() ,
а изменение угла
ограничим пределами:
,
а изменение угла
ограничим пределами:
![]() .
.
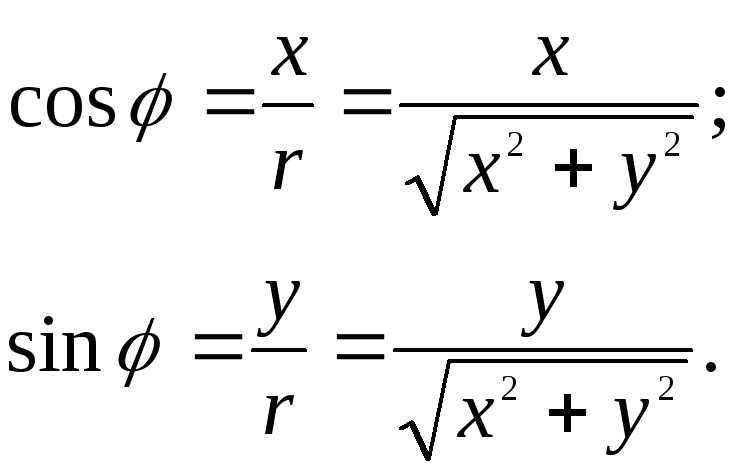
Соотношения между декартовыми и полярными координатами. Совместим декартову систему координат на плоскости с полярной системой координат так, чтобы ось Ох совпала с полярной осью ОР, а начало координат – с полюсом (рис. 15).

Рис.
15
Пусть
точка М
в декартовой системе координат имеет
координаты (х,
у),
а в полярной –
![]() .
.
Тогда:
![]() (3.1)
(3.1)
![]() ,
(3.2)
,
(3.2)
причем для однозначности определения угла по его тангенсу надо учитывать знаки х и у.
Формулы (3.1) позволяют вычислить декартовы координаты точки по известным полярным координатам, а формулы (3.2) – наоборот, по известным декартовым координатам находят полярные.
Из формул (3.1) и (3.2) следует, что:
 (3.3)
(3.3)
Пример
1. В полярной
системе координат требуется
построить точки
![]() и
и
![]() .
.
Решение. Построение показано на рис. 16.
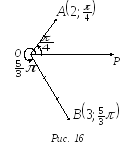
Проведем
луч, образующий угол
![]() с полярной осью, и от полюса
отложим отрезок, длина которого равна
2. Конец отрезка – искомая точка
А.
с полярной осью, и от полюса
отложим отрезок, длина которого равна
2. Конец отрезка – искомая точка
А.
Аналогично, строим точку В, учитывая, что откладываемый на полярной оси отрезок равен 3.
Пример
2. В
декартовой системе координат дана точка
![]() .
Найдите координаты точки М
в полярной системе координат.
.
Найдите координаты точки М
в полярной системе координат.
Решение. Воспользуемся формулами (3.2):

Искомая
точка М
имеет координаты:
![]() .
.