

3. Теорема о движении центра масс механической системы
3.1 Дифференциальные уравнения движения механической системы
Рассмотрим
механическую систему, состоящую из n
материальных точек. Выделим какую-нибудь
точку системы с массой mк.
Обозначим равнодействующую всех
приложенных к точке внешних сил (и
активных реакций связей) через
![]() ,
а равнодействующую всех внутренних сил
– через
,
а равнодействующую всех внутренних сил
– через
![]() (рисунок 3.1). Если т
(рисунок 3.1). Если т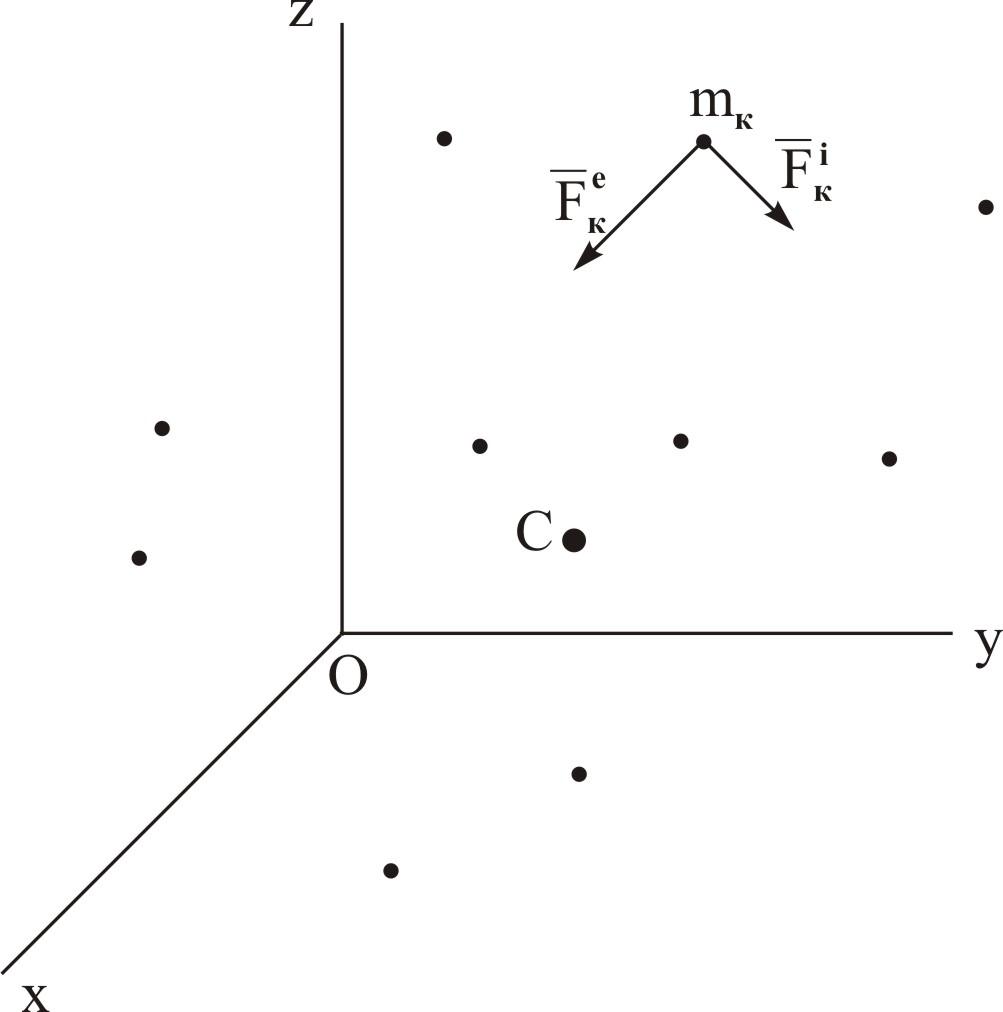 очка
имеет при этом ускорение
очка
имеет при этом ускорение
![]() ,
то по основному закону динамики
,
то по основному закону динамики
![]() . (3.1)
. (3.1)
Уравнение (3.1) представляет собой дифференциальное уравнение движения кй точки. Проецируя векторы обеих частей равенства (3.1) на оси х, у, z; получим дифференциальные уравнения движения системы в проекциях на эти оси:
Рисунок 3.1
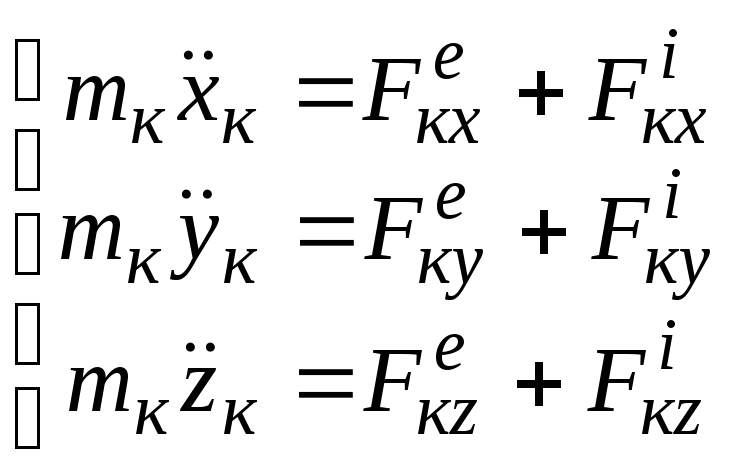 . (3.2)
. (3.2)
Для механической системы, имеющей n точек, получим 3n совместных дифференциальных уравнений движения. Так как внутренние силы, приложенные к точкам системы, в большинстве случаев остаются неизвестными, а число точек системы обычно велико, то эти 3n уравнений могут быть проинтегрированы лишь в исключительных случаях, поэтому используют другой способ для решения задач на движение системы тел.
3.2 Теорема о движении центра масс механической системы
В ряде случаев для определения характера движения системы (обычно твердого тела) требуется знать закон движения ее центра масс. Чтобы найти этот закон, составим уравнения движения для всех точек системы в виде (3.1) и сложим почленно их левые и правые части. Тогда получим:
![]() (3.3/)
(3.3/)
преобразуем левую часть этого равенства. Из формулы (2.2.1) для радиуса-вектора центра масс имеем
![]() .
.
Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем
![]()
или ![]() (3.3)
(3.3)
где
![]() - ускорение центра масс системы.
- ускорение центра масс системы.
Так как
по свойству внутренних сил системы
![]() ,
получим окончательно из равенства
(3.3/), учтя (3.3)
,
получим окончательно из равенства
(3.3/), учтя (3.3)
![]() (3.4)
(3.4)
т.е. произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил.
Уравнение (3.4) выражает теорему о движении центра масс системы, которая формулируется следующим образом: центр масс механической системы движется как материальная точка массой, равной массе всей системы, к которой приложены все внешние силы, действующие на систему.
Проецируя обе части векторного равенства (3.4) на оси х,у,z, получаем три уравнения в проекциях на оси координат:
![]() (3.5)
(3.5)
Уравнения (3.5) представляют собой дифференциальные уравнения движения центра масс. Из уравнений (3.4) и (3.5) следует, что внутренние силы непосредственно не влияют на движение центра масс, в связи с чем уравнения (3.4) и (3.5) имеют больше практическое значение.
Из кинематики известно, что поступательное движение твердого тела полностью определяется движением одной из его точек. Следовательно, решив задачу о движении центра масс тела как материальной точки массой, равной массе всего тела, можно определить поступательное движение всего тела.
Следствия из теоремы:
1. Если главный вектор внешних сил (![]() )
остается все время равным нулю, то центр
масс механической системы находится в
покое или движется равномерно и
прямолинейно.
)
остается все время равным нулю, то центр
масс механической системы находится в
покое или движется равномерно и
прямолинейно.
Из (3.4) если
![]() ,
то
,
то
![]() ,
т.е.
,
т.е.
![]() .
При этом, если
.
При этом, если
![]() центра масс равна нулю, то центр масс
находится в покое. Если же
центра масс равна нулю, то центр масс
находится в покое. Если же
![]() ,
то центр масс движется равномерно и
прямолинейно с этой скоростью.
,
то центр масс движется равномерно и
прямолинейно с этой скоростью.
2. Если проекция главного вектора внешних
сил на какую-либо неподвижную ось
остается все время равной нулю, то
проекция центра масс механической
системы на эту ось неподвижна или
движется равномерно, т.е. если
![]() ,
то
,
то
![]() ,
т.е.
,
т.е.
![]() ;
если
;
если
![]() ,
то
,
то
![]() и
и
![]() .
Следствия из теоремы о движении центра
масс системы выражают закон сохранения
движения центра масс системы.
.
Следствия из теоремы о движении центра
масс системы выражают закон сохранения
движения центра масс системы.
Вопросы для самоконтроля
-
Сформулируйте теорему о движении центра масс системы.
-
Какое движение твердого тела можно рассматривать как движение материальной точки, имеющей массу данного тела. Почему?
-
При каких условиях центр масс системы находится в состоянии покоя, и при каких условиях он движется равномерно и прямолинейно?
-
При каких условиях центр масс системы не перемещается вдоль некоторой оси?