

Определение ускорения точки
Ускорением точки называется векторная
величина
![]() ,
характеризующая быстроту изменения
вектора скорости.
,
характеризующая быстроту изменения
вектора скорости.
Пусть в некоторый момент времени t
движущаяся точка находится в положении
М и имеет скорость V, а в момент времени
t1 приходит в положение М1 и
имеет скоростьV1 (рисунок 1.3). Тогда
за промежуток времени t=t1–t
скорость точки получает приращение
![]()
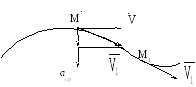

Рисунок 1.3
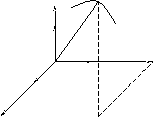
Для построения вектора
![]() отложим от точки М вектор
отложим от точки М вектор
![]() ,
и построим параллелограмм, в котором
диагональю будет
,
и построим параллелограмм, в котором
диагональю будет
![]() ,
а одной из сторон
,
а одной из сторон
![]() ,
тогда вторая сторона будет изображать
вектор
,
тогда вторая сторона будет изображать
вектор
![]() .
Следует отметить, что вектор
.
Следует отметить, что вектор
![]() всегда направлен в сторону вогнутости
траектории.
всегда направлен в сторону вогнутости
траектории.
Отношение приращения вектора скорости
![]() к соответствующему промежутку времени
t определяет вектор
среднего ускорения точки, за этот
промежуток времени.
к соответствующему промежутку времени
t определяет вектор
среднего ускорения точки, за этот
промежуток времени.
![]() (1.5)
(1.5)
Вектор среднего ускорения имеет тоже
направление, что и вектор
![]() ,
т.е. направлен в сторону вогнутости
траектории.
,
т.е. направлен в сторону вогнутости
траектории.
Ускорением точки в данный момент времени
или мгновенным ускорением называется
векторная величина
![]() ,
к которой стремится среднее ускорение
,
к которой стремится среднее ускорение
![]() при стремлении промежутка времени t
к нулю.
при стремлении промежутка времени t
к нулю.
![]() (1.6)
(1.6)
Следовательно, вектор мгновенного ускорения точки равен первой производной от вектора мгновенной скорости или второй производной от радиуса-вектора точки по времени.
Размерность ускорения м/с2.
При прямолинейном движении точки вектор
ускорения точки
![]() направлен вдоль прямой, по которой
движется точка. Если траекторией точки
является плоская кривая, то вектор
ускорения
направлен вдоль прямой, по которой
движется точка. Если траекторией точки
является плоская кривая, то вектор
ускорения
![]() ,
также как и вектор
,
также как и вектор
![]() лежит в плоскости этой кривой и направлен
в сторону её вогнутости.
лежит в плоскости этой кривой и направлен
в сторону её вогнутости.
1.2 Координатный способ задания движения точки
Положение точки можно непосредственно определять её декартовыми координатами X,Y,Z, которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. её положение в пространстве в любой момент времени, надо знать значение координат точки в каждый момент времени, т.е. знать зависимости:
X=f1(t); Y=f2(t); Z=f3(t) (1.7)
которые представляют собой уравнения движения точки в прямоугольных декартовых координатах (рисунок 1.4).
 M
M
z
![]()
![]()
z
y
о
![]()
![]()
x
y
Рисунок 1.4
Эти уравнения представляют собой закон движения точки при координатном способе задания движения.
Если движение точки происходит на плоскости XOY, то в этом случае будет два уравнения движения:
X = f1 (t) и Y = f2 (t) (1.8)